밭 노지 환경 주행을 위한 모듈형 농업 로봇 플랫폼에 대한 연구
 ; Seong Yong Woo1
; Su Hwan Song1
; Hyung Gil Hong1
; Haeyong Yun1
; Jang Seok Oh1
; Junseong Kim1
; Dong Woo Kim1
; Kab Ho Seo1
; Dae Hee Kim†
; Seong Yong Woo1
; Su Hwan Song1
; Hyung Gil Hong1
; Haeyong Yun1
; Jang Seok Oh1
; Junseong Kim1
; Dong Woo Kim1
; Kab Ho Seo1
; Dae Hee Kim†
© Korea Robotics Society. All rights reserved.
Abstract
This paper designed modular agricultural robotic platform capable of a variety of agricultural tasks to address the problems caused by a decline in agricultural populations and an increase in average age. We propose a modular robotic platform that can perform many tasks required in field farming by replacing only work modules with common robotic platforms. This platform is capable of steering while driving on four wheels in an upland environment where farm work is performed, and an attitude control module is attached to each drive module to control the attitude of the platform. In addition, the width of the platform is designed to be variable in order to operate in various ridges according to the crop cultivation method. Finally, we evaluated five items: variable width, gradient, attitude control angle, step and road speed in order to carry out the farming industry while maintaining a stable posture.
Keywords:
Agricultural Robot, Modular Farming Robot, Remote Control, Unmanned Intelligent Robot Platform1. 서 론
최근 농촌 인구의 감소 및 고령화에 따라 생산력 저하에 의해 국내 농업 경쟁력은 지속적으로 하락하고 있다. 국내 밭 농업은 소량 다품종 생산의 노동집약적 산업 구조로 되어 있어 낮은 기계화율, 노동력 부족 등으로 타 산업에 비해 경쟁력이 취약하며 농기계 산업 또한 원천핵심 및 부품소재 분야에서 선진국 대비 70% 이하의 기술 수준으로 미래 수요에 대비한 무인운전 및 자동제어 기술 등의 원천핵심 기술 개발이 시급한 실정이다[1]. 선진국 농기계 업체의 경우 GPS (Global Positioning System), GIS (Geographic Information System), 영상카메라, 생육계측센서 등을 이용한 무인운전 및 자동 제어기술 개발[2-8] 등에 집중 연구개발 중이지만, 국내에서는 본격적인 로봇 기술의 적용은 아직 이루어지지는 않았고, 국내 일부 농기계 전문업체가 로봇 기술을 적용한 자율 주행 트랙터[9-11] 등에 관심을 보이는 수준이며, 국가 주도의 소규모 사업만이 진행 중인 상황이다. 관련 시장 현황에서도 스마트 농업 관련 시장은 지속적으로 확대되고 있으나, 대부분 외산 기계에 의존하고 있다. 그러므로 한국형 밭 농업 특성에 부합하면서도 고령자 및 여성 농업인이 운용하기 손쉬운 자동 소형 농기계 개발이 시급하고 중요한 상황이다. 본 연구에서는 농작업 노동력 절감 및 작업 능률을 극대화할 수 있도록 밭 노지에서 다양한 작물과 재배양식에 적용할 수 있는 모듈형 농업 로봇 플랫폼을 개발하여[12], 안정적인 밭 환경에서의 운전을 위해 요소별 주행 평가를 통해 성능을 검증하였다.
2. 플랫폼 구성 및 제작
2.1 플랫폼 설계
미래 농업에서는 인간의 노동력에 의존하는 산업구조에서 탈피하여 4차 산업과 맞물려 첨단기계 및 로봇 기반으로 작물을 재배 및 관리하는 스마트 팜 구조로 탈바꿈할 것으로 예상된다. 이에 따라 본 연구에서도 공용 로봇 플랫폼에 작업 모듈만 교체함으로써 밭 농업에서 필요한 여러 가지 작업을 모두 수행할 수 있도록 하는 모듈 교체형 로봇 플랫폼을 제안하였다. [Fig. 1]에서는 앞서 설명한 모듈형 농업 로봇 개념도를 나타낸 것이다. 공용으로 사용되는 로봇 플랫폼의 중앙 부분은 목적에 맞게 작업 모듈을 탈·부착할 수 있도록 공간이 마련되어 있고, 주행부는 작업 중 고랑 이동 시 작동반경을 최소화하기 위해 4WD/4WS 방식을 채택하였다. 또한 각 바퀴에 높낮이를 조절할 수 있는 자세제어 시스템을 구성하고 있어 경사지 주행, 운반 수평 운반, 정식기 사용 등 작업종류에 따라 지면과 수평을 맞춰야 하는 상황에 대한 대응이 가능하도록 하였다.
![[Fig. 1]](/xml/26085/JKROS-15-2-124_F1.jpg "[Fig. 1]")
The concept of modular agricultural robot
제안한 밭 농업용 로봇 플랫폼은 사용자의 원격제어 혹은 각종 센서 융합에 의한 자율 주행을 목표로 수행하고 있으나 본 논문에서는 무선 조정기를 이용한 원격제어에 대해 우선 제안하고 자율주행 부분은 추가 연구가 진행이 되면 추후 다시 제안할 예정이다. 로봇 플랫폼은 [Fig. 2]와 같이 ROS (Robot Operation System)를 기반으로 하는 주 제어기가 CANOPEN 방식을 이용하여 총 12개(주행용 4개, 자세제어용 4개, 조향용 4개)의 모터 및 작업 모듈을 제어한다. 작업 모듈은 주제어기와 독립적으로 구성되어 있어 주제어기로부터 작업 모드 및 동작 유무에 대한 명령만을 받고, 모듈 동작에 대한 전반적인 제어는 작업 모듈 내부의 MCU (Micro Controller Unit)가 관장하게 된다. 원격제어를 위한 무선 조정기는 RF 무선 통신을 적용하였고, 로봇 플랫폼 관제를 위한 관제용 PC와는 Wifi 통신을 이용하여 플랫폼과 연결하였다.
![[Fig. 2]](/xml/26085/JKROS-15-2-124_F2.jpg "[Fig. 2]")
The diagram of system control
플랫폼의 구동 모터의 구성은 구동, 조향, 자세 제어 3가지 로 구성되며, 각 모터는 구동조건에 따라서 식 (1)~(3)에 의해 산출하였다.
| (1) |
| (2) |
| (3-1) |
| (3-2) |
| (3-3) |
- ․ F0 : 모터 구동력
- ․ m : 질량
- ․ a : 가속도
- ․ θ : 구동 노면 각도
- ․ T : 자세제어 토크
- ․ L0 : 중심축 거리
- ․ F1 : 볼스크류 구동력
- ․ P : 볼스크류 리드
- ․ F2 : 예압하중
- ․ μ0 : 볼스크류 마찰계수
- ․ η : 볼스크류 효율
- ․ W : 부하중량
- ․ L1 : 볼스크류 폭
- ․ L2 : 볼스크류와 하중간 거리
- ․ μ1 : 가이드 마찰계수
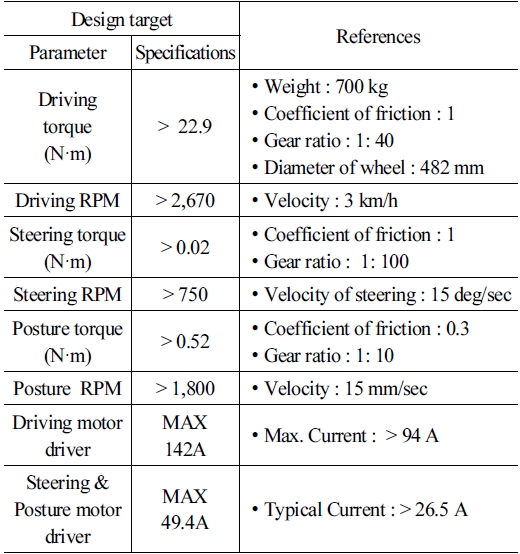
모터의 구동력은 평지와 경사면의 각도, 자중, 바퀴의 크기, 감속비, 가감속도 및 구동속력에 따라 결정된다. 플랫폼의 무게는 작업 모듈 체결 시 약 700 kg의 중량을 가지게 된다. 최대 속력은 6 km/h로 설정하였고, 작업 시 작업 속력은 1~3 km/h를 기준으로 하였다. 가속력은 최대 속력이 1초에 도달하는 것으로 기어 비는 40, 바퀴 지름은 약 482 mm, 최대 경사면 각도는 18°를 기준으로 하였다. 해당 조건을 식 (1), (2)에 각각 대입하여 약 3.71 N, 약 2.24 N·m의 바퀴에 작용하는 힘을 계산할 수 있다. 여기에 기어비와 출력의 상관관계에 의하여 주행 모터에 필요한 출력을 계산하였다. 조향부는 자중과 기구의 형태, 가·감속, 감속비와 조향 속력에 따라서 출력이 결정되며, 식 (2)를 기반으로 바퀴 하중과 조향가속도 시간 0.5초, 최대 초당 45도 회전각을 가자는 조건으로 회전축과 거리를 대입하여 약 1.4 N·m의 결과를 알 수 있으며, 여기에 기어비를 대입하여 조향 모터 출력을 산출하였다. 자세 제어부는 구성 기구의 형태, 피치, 순간 구동 거리, 속력에 따라서 출력이 결정된다. 볼스크류와 LM 가이드로 구성된 자세제어 축은 주행 시 질량의 편중을 예상하여 한 축에 최대 400 kg 하중과 리드피치, 볼스크류 폭, 예압 하중, 기어비를 식 (3-1), (3-2), (3-3)에 대입하여 계산하였다.
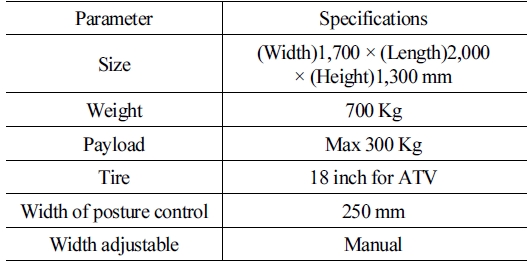
구성 축의 각 조건에 해당하는 계산결과는 [Table 1]과 같으며, 각 구동 조건에 관성의 허용치인 150%, 300% 조건과 토크, RPM, 소모전류에 대한 효율을 따져 구동은 높은 관성력과 소비전류 효율로 인하여 1.6 kW 모터, 조향은 조건에 따라 400 W, 자세제어는 브레이크 내장형 200 W 제품의 모터를 선정하였다. 드라이버는 각 모터의 최대 소비전류를 바탕으로 DC 48 V 전압 입력을 지원하며, CANOpen 네트워크가 가능한 제품으로 선정하였으며, 구동부는 최대 142 A 출력이 가능한 1.6 kW 모터용 드라이버와 자세제어와 조향 드라이버는 관리와 제품의 단일화를 위하여 400 W 기준으로 최대 출력 49.4 A 전류 출력이 가능한 200~400 W 모터용 드라이버제품을 선정하여 적용하였다. 추후 플랫폼에 장착될 작업 모듈(로터리, 정식기 등)의 무게(100 kg 내외)를 감안하여 플랫폼의 최대 가반하중은 300 kg이 될 수 있도록 설계하였다.

Basic data for selection of motor
플랫폼 조정을 위한 원격 제어기는 32bit 프로세서를 적용하여 다중 입력을 고속으로 처리하도록 설계하였다. [Fig. 3]과 같이 플랫폼 구동과 작업 모듈 제어 스위치로부터 신호가 입력되고, 생성된 정보는 패킷화되어 RF 무선 모듈을 통해 플랫폼 내 주 제어기로 전달되게 된다. 원격 제어기에는 별도의 LCD (Liquid Crystal Display)가 구성되어 있어 제어 명령 상태 및 배터리 관리 정보를 사용자가 확인할 수 있도록 하였다.
![[Fig. 3]](/xml/26085/JKROS-15-2-124_F3.jpg "[Fig. 3]")
Block diagram of remote controller
2.2 플랫폼 제작
앞서 설명한 설계안을 기반으로 밭 노지용 농업로봇 플랫폼 및 원격제어기를 [Fig. 4], [Fig. 5]와 같이 제작하였다. 제어를 위한 전장박스는 플랫폼 좌·우로 배치하였고, 중앙에는 작업 모듈을 장착하여 주행하면서 동시에 작업을 수행할 수 있도록 하였다. 플랫폼 작업 폭은 중앙 원형 지지대를 적정 길이의 제품으로 교체함으로써 변경할 수 있다. 원격제어기는 누름 스위치, 위치고정 스위치, 로터리 스위치를 각각 기능에 맞게 구성하여 제작하였다.
![[Fig. 4]](/xml/26085/JKROS-15-2-124_F4.jpg "[Fig. 4]")
Modular agricultural robot
![[Fig. 5]](/xml/26085/JKROS-15-2-124_F5.jpg "[Fig. 5]")
Remote controller
제작된 로봇 플랫폼의 주요 사양은 [Table 2]에 나타내었다.
The specification of robot platform
3. 실험 결과
3.1 플랫폼 주행 평가
플랫폼 주행 평가는 밭 노지 환경에서 작업 및 주행을 함에 있어서 필요하다고 판단된 총 5가지 항목에 대해 수행하였다. 가변 폭은 두둑의 폭에 따른 농작업 가능 수준을 확인하기 위해 수행하였으며, 자세조절 각도 폭은 주행 중 전복 방지 및 경사지 작업성 확보를 위한 최대 각도를 확인하기 위해 평가하였다. 등판각도를 평가함으로써 이동 중 경사로 주행성을 확인하였고, 이송속도는 로봇 플랫폼의 주행 가능한 속도를 확인하여 작업량을 예측하고자 하였다.
플랫폼 작업 폭 가변은 플랫폼 중앙부 기준 작업 모듈이 삽입되는 위치의 폭을 변경 전·후로 측정하였다. 평가 결과 [Fig. 6]과 같이 작업 폭은 최소 80 cm, 최대 140 cm로 폭을 변경할 수 있었다.
![[Fig. 6]](/xml/26085/JKROS-15-2-124_F6.jpg "[Fig. 6]")
Width adjustment test of platform
플랫폼의 자세조절 기능은 5도 이상의 경사로에 플랫폼을 이동시키고 본체의 수평 유지 가능여부를 확인하였다. [Fig. 7] 에서와 같이 약 5.5도의 경사로에 플랫폼의 전륜을 올려놓은 후 자세제어 모터가 구동되어 본체의 경사도가 0도가 됨을 확인하였다. 자세제어에 소요되는 시간은 약 7초가 소요되었고 이는 모터 RPM 제어로 가감이 가능하다. 이로써 본 플랫폼으로 지면의 경사도와 상관없이 작물을 올 곧게 정식할 수 있음을 확인할 수 있었다. 자세제어가 되지 않아 경사지에서 작물을 올 곧게 정식하지 못할 경우에는 작물 성장하면서 지면으로 눕기 때문에 올 곧게 정식하는 것은 정식작업에서 중요한 부분이다.
![[Fig. 7]](/xml/26085/JKROS-15-2-124_F7.jpg "[Fig. 7]")
Posture control test of platform
플랫폼의 경사로 주행 특성을 확인하기 위해 15도 경사로에서 주행 평가를 수행하였다. 먼저 플랫폼을 평지(0도)에서 출발시켜 경사로(15도 이상) 에 4륜이 모두 올라간 후 정지하고, 이후 다시 하강하는 방식으로 평가를 하였다. 평가 결과, 플랫폼의 주행모터의 최대 출력 전류는 [Fig. 8]과 같이 25.6 A로 측정되었으며, 이는 출력제한 전류 60 A 대비 42.7% 수준으로 안정적인 주행이 가능함을 확인하였다. 등판각도 평가 이미지는 [Fig. 9]에 나타내었다.
![[Fig. 8]](/xml/26085/JKROS-15-2-124_F8.jpg "[Fig. 8]")
Output current characteristic graph when Obstacleovercoming test
![[Fig. 9]](/xml/26085/JKROS-15-2-124_F9.jpg "[Fig. 9]")
Slope test of platform
농업용으로 사용될 개발 플랫폼은 작업 중 두둑이나 밭둑의 단차를 등반해야 하는 경우가 종종 있다. 이와 같은 상황을 모사하여 가로, 세로 10 cm, 등반 각도 약 45도로 장애물을 제작하여 플랫폼이 장애물 통과 여부를 확인하였다. 플랫폼을 전진 및 후진 방향을 주행하면서 장애물을 왕복으로 등반했을 때 [Fig. 10]과 같이 안정적으로 장애물을 통과하는 것을 확인하였다.
![[Fig. 10]](/xml/26085/JKROS-15-2-124_F10.jpg "[Fig. 10]")
Obstacle-overcoming test
일반적으로 농기계는 농작업에 따라 1~2 km/h 속도로 주행을 하면서 작업을 수행한다. 이에 개발 플랫폼의 주행 속도를 특성을 평가하여 농작업 목적으로 적용 가능한지 검토하였다. 플랫폼이 출발하여 가속이 완료된 후 시작지점으로부터 2 m 구간을 지날 때까지의 걸리는 시간을 측정하여 속도로 환산하였다. 주행시간은 주행 모습을 1/100초 단위의 프레임 속도로 녹화하여 환산하였다. 평가 결과는 [Table 3]과 같이 2 m의 거리를 3.32초 동안 주행하였으며, 속도로 환산결과 2.168 km/h로 농작업 적용 속도로 적합함을 확인하였다. 평가 이미지는 [Fig. 11]에 나타내었다.
Test result of platform speed
![[Fig. 11]](/xml/26085/JKROS-15-2-124_F11.jpg "[Fig. 11]")
Speed test of platform
4. 결 론
본 연구에서는 농작업 노동력 절감을 통한 작업 능률 극대화가 가능하도록 밭 노지에서 다양한 작물과 재배양식에 적용할 수 있는 모듈형 농업 로봇 플랫폼을 제안하였다. 여러 농작업에서 사용 가능한 공용 로봇 플랫폼을 설계, 제작 및 평가를 수행하였다. 자세조절 각도 폭, 등판각도, 장애물 극복단차, 주행속도 등의 항목에 대해 기본 주행 성능 평가 결과, 밭 노지 환경에서 안정적인 주행이 가능함을 확인하였다. 향후에는 개발된 주행 플랫폼과 로터리, 휴립 피복, 방제, 정식 등의 작업 모듈을 통합하여 농작업에 대한 로봇플랫폼의 성능을 확인하고 각종 센서 및 카메라, GPS등을 조합하여 자율 주행 및 작업 기능을 구현함과 동시에 등판각도, 장애물 극복단차도 다양한 높이 및 형태(굴곡형, 계단형 등)의 환경에서 추가 평가를 진행할 예정이다.
Acknowledgments
This work was supported by Korea Institute of Planning and Evaluation for Technology in Food, Agriculture and Forestry (IPET) through Advanced Production Technology Development Program, funded by Ministry of Agriculture, Food and Rural Affairs (MAFRA) (317072-04, 119083-1)
References
-
L. Grimstad, C. D. Pham, H. T. Phan, and P. J. From, “On the design of a low-cost, light-weight, and highly versatile agricultural robot,” 2015 IEEE International Workshop on Advanced Robotics and its Social Impacts (ARSO), Lyon, France, 2015.
[https://doi.org/10.1109/ARSO.2015.7428210]

-
A. Suprem, N. Mahalik, and K. Kim, “A review on application of technology systems, standards and interfaces for agriculture and food sector,” Computer Standards & Interfaces, vol. 35, no. 4, pp. 355-364, Jun., 2013.
[https://doi.org/10.1016/j.csi.2012.09.002]
-
Y. Zhao, L. Gong, Y. Huang, and C. Liu, “A review of key techniques of vision-based control for harvesting robot,” Computers and Electronics in Agriculture, vol. 127, pp. 311-323, Sept., 2016.
[https://doi.org/10.1016/j.compag.2016.06.022]
-
D. C. Slaughter, D. K. Giles, and D. Downey, “Autonomous robotic weed control systems: A review,” Computers and Electronics in Agriculture, vol. 61, no. 1, pp. 63-78, 2008.
[https://doi.org/10.1016/j.compag.2007.05.008]
- W. K. Kim, D. G. Kim, and S. H. Yang, “Recognition of agricultural components using IR image for agricultural field robots,” ICROS Annual Conference 2018, pp. 335-336, 2018, [Online], https:// dbpia.co.kr/journal/articleDetail? nodeId=NODE07449969.
-
C. W. Kim and J. H. Seo, “A Bio Inspired Control Strategy for a Mecanum-Wheeled Robot Position Control,” Journal of Institute of Control, Robotics and Systems, vol. 23, no. 12, pp. 1055-1062, Dec., 2017.
[https://doi.org/10.5302/J.ICROS.2017.17.0197]
-
K. K. Ko, S. Yang, and I. Jang, “Real-Time Tomato Ripeness Classification System based on Deep Learning Model for Object Detection,” Journal of Institute of Control, Robotics and Systems, vol. 24, no. 11, pp. 999-1004, Nov., 2018.
[https://doi.org/10.5302/J.ICROS.2018.18.0166]
-
V. Subramanian, T. F. Burks, and A. A. Arroyo, “Development of machine vision and laser radar based autonomous vehicle guidance systems for citrus grove navigation,” Computers and Electronics in Agriculture, vol. 53, no. 2, pp. 130-143, Sept., 2006.
[https://doi.org/10.1016/j.compag.2006.06.001]
-
H. Mousazadeh, “A technical review on navigation systems of agricultural autonomous off-road vehicles,” Journal of Terramechanics, vol. 50, pp. 211-232, Jun., 2013.
[https://doi.org/10.1016/j.jterra.2013.03.004]
- E. S. G. Leonardo, S. H. Guillermo, and R. G. Adriana, “Design and test of a path tracking controller to a high capability agricultural,” 5th International Conference on Mechatronics and Robotics Engineering, pp. 60-64, Feb., 2019.
- B. S. Blackmore, H. W. Griepentrog, H. Nielsen, M. Nørremark, and J. Resting-Jeppesen, “Development of a Deterministic Autonomous Tractor,” CIGR International Conference, pp. 1-8, Beijing, China, 2004, [Online], https://www.researchgate.net/publication/257157920_Development_of_a_deterministic_autonomous_tractor.
- S. H. Song, J. S. Oh, H. G. Hong, S. Y. Woo, K. H. Seo, and D. H. Kim, “Robot platform design for multipurpose field farming,” KSMTE Conference 2018, pp. 148, 2018, [Online], https://dbpia.co.kr/journal/articleDetail?nodeId= NODE09224404.

2007 안동대학교 전자공학교육학과(학사)
2009 안동대학교 바이오전자공학과(석사)
2019 세종공업(주) 전장연구소 선임연구원
2019~현재 한국로봇융합연구원 선임연구원
관심분야: 센서, 회로설계, 로봇제어, 농업용 로봇

2009 경북대학교 기계자동차공학과(학사)
2014 DCT 기술 연구소 주임연구원
2016 DGIST 로봇공학과(석사)
2017 UNIST 기계항공원자력 연구원
2017~현재 한국로봇융합연구원 주임연구원
관심분야: 시스템 로봇 제어, 자동 제어, 농업용 로봇

2014 안동대학교 기계설계공학과(학사)
2016 안동대학교 기계설계공학과(석사)
2018 한국섬유기계융합연구원
2018~현재 한국로봇융합연구원 주임연구원
관심분야: 기구설계, 농업용 로봇, 계측 제어

2012 동국대학교 전자공학과(학사)
2014 동국대학교 전자전기공학과(석사)
2018 동국대학교 전자전기공학과(박사)
2017~현재 한국로봇융합연구원 선임연구원
관심분야: 딥러닝, 농업용로봇, 영상처리, 자율주행, 자동 제어

2010 안동대학교 기계공학(학사)
2012 안동대학교 기계시스템공학(석사)
2017 안동대학교 기계시스템공학(박사)
2019 경북테크노파크 전임연구원
2019~현재 한국로봇융합연구원 선임연구원
관심분야: 농업용 로봇, 기구설계, 촉각 센서

2004 고려대학교 전자 및 정보공학과(학사)
2006 고려대학교 전자정보공학과(석사)
2016 고려대학교 전자정보공학과(박사)
2018 한국과학기술연구원
2018~현재 한국로봇융합연구원 선임연구원
관심분야: 3차원 복원, 딥러닝, 농업용 로봇, 영상처리, 자율주행

2011 안동대학교 전자교육과(학사)
2019 카펙발레오 중앙 연구소 선임연구원
2019~현재 한국로봇융합여구원 주임연구원
관심분야: 구동 모터 제어, 농업용로봇, 강인제어, 자동제어

2018 동아대학교 전자공학과(학사)
2019~현재 한국로봇융합연구원 연구원
관심분야: ROS, SLAM, LINUX

1999 고려대학교 전기공학과(학사)
2001 KAIST 전자전산학과(석사)
2009 KAIST 전자전산학과(박사)
2009~현재 한국로봇융합연구원 책임연구원
관심분야: 지능제어, 임베디드 시스템, 농업용 로봇, 영상처리

2002 안동대학교 컴퓨터공학과(석사)
2010 안동대학교 정보통신공학과(박사)
2019 한국로봇융합연구원 책임연구원
2019~현재 노지스마트팜사업단 수석연구원
관심분야: 지능제어, 임베디드 시스템, 영상처리