근전도 패턴 인식 및 분류 기반 다자유도 전완 의수 개발

© Korea Robotics Society. All rights reserved.
Abstract
This paper presents a multiple DoFs (degrees-of-freedom) prosthetic forearm and sEMG (surface electromyogram) pattern recognition and motion intent classification of forearm amputee. The developed prosthetic forearm has 9 DoFs hand and single-DoF wrist, and the socket is designed considering wearability. In addition, the pattern recognition based on sEMG is proposed for prosthetic control. Several experiments were conducted to substantiate the performance of the prosthetic forearm. First, the developed prosthetic forearm could perform various motions required for activity of daily living of forearm amputee. It was able to control according to shape and size of the object. Additionally, the amputee was able to perform ‘tying up shoe’ using the prosthetic forearm. Secondly, pattern recognition and classification experiments using the sEMG signals were performed to find out whether it could classify the motions according to the user’s intents. For this purpose, sEMG signals were applied to the multilayer perceptron (MLP) for training and testing. As a result, overall classification accuracy arrived at 99.6% for all participants, and all the postures showed more than 97% accuracy.
Keywords:
Prosthetic Forearm, Myoelectric Prosthesis, Multilayer Perceptron, Pattern Recognition1. 서 론
사람의 손은 일상생활에서 가장 많이 사용되는 부분이고, 물건을 잡고 이동하는 등의 다양한 동작을 구현하기 위해 사 용되는 신체 부위이다. 이렇듯 손의 중요성에도 불구하고 사 고, 질병 등의 원인으로 인해 손목, 팔꿈치, 그리고 전완 등의 일부가 절단되는 경우가 늘어나고 있는 추세이다[1,2]. 의지 및 보조기 관련 산업분야에서는 의수 사용자들의 라이프 스타일을 충족시키기 위해 의수들이 지속적으로 개발되어오고 있으며, 대표적으로는 Touch Bionic의 i-Limb, Otto Bock의 Bebionic과 Michelangelo 등이 있다.
대표적인 인공 의수인 근전도 전동 의수(myoelectric prosthesis) 는 표면 근전도를 이용하여 절단 부위에 남아있는 근육의 움 직임을 측정하여 구동된다. 상용화된 의수들은 절단 부위에서 표면 근전도를 취득하여 손동작의 신호에 대하여 몇 가지 패 턴으로 분류하거나, on-off 모드의 변환 신호 등으로 사용되고 있다. 이러한 전동 의수는 사람의 손 동작을 모방하여 구동이 가능하도록 개발되었으나, 의수 무게 이슈와 고가의 제작 비 용 등으로 널리 사용되지 못하고 있다. 또한 의수의 한 부분인 소켓(socket)은 절단 부위를 덮으며, 의수와 연결하는 역할을 한 다. 보통 소켓 내부에 삽입되어 있는 금속 전극(metal electrodes) 이 표면 근전도 신호를 얻을 수 있도록 부착된다. 그러나 소켓은 보철사가 사용자 절단 부위에 맞게 수작업(handcrafting)으로 제 작해야 하므로, 많은 시간과 비용이 필요하다.
이러한 기존의 문제점들을 개선하기 위해, 여러 분야에서 인공 의수 및 소켓에 관한 기계적 메커니즘, 생체신호를 이용 한 구동 방법 및 시스템 등의 연구들이 진행되고 있다[3-7]. 특 히, 표면 근전도 신호처리는 의수뿐만 아니라 재활 및 의료 분 야에서 진단 및 보정 등의 목적을 위해 연구되어왔다. 근전도 전동 의수에 관한 연구에서는 지도 학습(supervised learning) 을 이용하여 동작 패턴인식 및 분류에 관한 연구들이 활발하 게 진행되고 있다. 동작 인식을 통한 패턴 분류는 기계학습 (machine learning)의 알고리즘을 이용하여 손목과 손가락 움 직임에서 나오는 근전도 신호를 패턴화 시키며 높은 인식률과 다양한 패턴 인식이 가능하다[8-11]. 기존 선행연구들의 경우, 의수에 관한 손과 손목에 대한 메커니즘, 소켓 개발 및 디자인, 근전도를 이용한 신호처리 등의 분야에서 개별적으로 다양하 게 연구가 진행되어 왔으나, 이를 통합한 의수 제작 및 실용성 을 검증하는 연구는 미비하다.
따라서 본 연구는 다 자유도를 지닌 손과 손목, 절단 부위에 착용할 수 있는 소켓 및 근전도 신호로부터 사용자의 동작 의 도를 파악하여 다양한 구동을 할 수 있는 시스템 설계 및 개발 을 목적으로 한다. 본 논문은 2장에서 전완 의수 설계 및 제작, 3장에서 실험 방법 및 결과, 그리고 4장 결론으로 구성된다. 보 다 구체적으로는 2장에서는 전완 의수의 기계 요소인 손, 손 목, 소켓의 설계 및 제작과정을 제시하고, 이어서 근전도 패턴 인식 및 분류 알고리즘에 관하여 설명하고, 3장에선 다자유도 전완 의수 및 통합 인식 및 제어시스템을 이용한 패턴 인식 성 능과 통합된 전완 의수 실시간 동작을 확인한다. 마지막으로, 4장에서는 본 연구에 대한 요약 및 결론을 포함하여 추후 연구 방향에 대하여 기술하고자 한다.
2. 다자유도 전완 의수 설계 및 제작
2.1 다자유도 손 메커니즘 설계
제안된 손 메커니즘은 물체 적응형 쥠(adaptive grasping)을 구현하며 9개의 동작 자유도를 가진다. [Fig. 1]에서 보여지듯이 개발된 개별 손가락으로 중수 수지 관절(Metacarpophalangeal joint, MCP)과 원위 지간 관절(Distal interphalangeal joint, DIP) 의 2마디로 구성된다. 제안된 손가락의 MCP는 4절 링크 메커 니즘을 이용하였으며 서로 같은 길이로 설계하여 평행사변형 (parallelogram) 메커니즘으로 구동된다. 또한, [Fig. 2]에서 제 시 되었듯이 동력 전달을 위해 비틀림(torsional) 스프링을 이 용하여 손바닥보다 큰 물체를 잡을 때 MCP가 뒤로 밀리도록 설계하였으며, DIP를 이용하여 물체를 잡을 수 있도록 적응형 쥠 동작을 구현하였다.
![[Fig. 1]](/xml/26122/JKROS-14-3-228_F1.jpg "[Fig. 1]")
Finger mechanism using parallelogram
![[Fig. 2]](/xml/26122/JKROS-14-3-228_F2.jpg "[Fig. 2]")
Adaptive grasping mechanism for MCP
MCP와 DIP 관절의 구동 순서는 다음과 같으며, 정확한 설 명을 위해 알파벳 대문자 표식을 사용한다. [Fig. 3(a)]는 MCP 구동 메커니즘으로, 구동 모터 토크가 A(베벨기어), B(베벨기 어), C(스퍼기어), 그리고 D(스퍼기어) 순서대로 동력이 전달 되고, D에 있는 비틀림 스프링을 통해 적응형 쥠이 구현된다. 이어서 [Fig. 3(b)]는 DIP 구동 과정으로 B를 통하여 E(스퍼기 어), F(스퍼기어), 그리고 G(링크절) 순서대로 동력이 전달되 어 구동된다.
![[Fig. 3]](/xml/26122/JKROS-14-3-228_F3.jpg "[Fig. 3]")
Driving mechanisms of MCP and DIP joint in the finger
사람의 손가락은 물체를 파지(grasping)하기 위하여 굴신 (flexion-extension)과 내·외전(adduction-abduction) 동작 등을 수행한다. 사람의 MCP와 DIP 가동 범위는 110°와 90°이며[12], 제안된 손가락은 구동에 간섭을 받지 않는 범위에서 각각 96° 와 80°로 선정하였다. 또한, 자연스러운 파지 동작이 가능하도 록 베벨기어와 스퍼기어를 조합하였으며, MCP와 DIP 마디의 기어비를 다르게 조정함으로써 손가락 끝 힘(fingertip force) 을 조절할 수 있다. 설계 시 사용했던 감속비는 모터 256:1, 베 벨기어 감속 2:1, MCP 감속 8:5, 그리고 DIP 가속 6:7으로 설계 하였으며 손가락 끝 힘은 8N이다. 또한, [Fig. 4]와 같이 내·외전 동작을 구현하기 위해 검지, 약지, 새끼손가락 윗부분과 손등 부분에 비틀림 스프링을 이용하여 큰 물체가 손안에 들어왔을 때 수동적으로 10도의 각도로 내·외전 동작을 수행할 수 있다.
![[Fig. 4]](/xml/26122/JKROS-14-3-228_F4.jpg "[Fig. 4]")
Tendon-driven actuation in wrist mechanism
2.2 1자유도 손목 메커니즘 설계
사람의 손목은 전완부 회전을 제외한 굴절(wrist flexion) 및 신전(wrist extension)과 요측편향(radial deviation) 및 척측편 향(ulnar deviation)으로 2 자유도를 가진다. 굴절 및 신전의 관 절 가동범위가 요측 및 척측 편향 운동보다 크다는 점을 감안 하여 본 논문에서는 굴절 및 신전의 광범위한 관절 가동범위를 지닌 1자유도 손목을 의수 개발에 적용하는 것을 목표로 한다.
넓은 범위의 관절 가동범위를 가지도록 설계하기 위하여 구름(rolling contact joint) 운동 방식의 관절을 채택하였다. 구 름 관절은 위성(planetary) 기어와 선(sun) 기어의 관계와 같이, 하나의 원판이 다른 원판 주위로 구르면서 회전한다. 이때, 두 원판의 접촉 점에서 회전 중심을 지니며 원판의 회전에 의해 접촉 점의 움직임에 따라 회전 중심 또한 이동한다. 이러한 원 리를 이용하여 무릎 메커니즘[13], 척추관절 메커니즘[14], 팔꿈 치 메커니즘[15] 등에 구름 관절이 다양하게 적용되고 있다. 특 히, 팔꿈치 메커니즘은 구름 관절의 회전 중심과 양단 선형 운 동 사이의 대칭성을 이용하고, 도르래의 원리를 적용하여 관 절 토크를 증폭시킨다.
이와 동일한 방법으로 소형 손목 메커니즘을 [Fig. 4]와 같이 –90°~90°의 관절 가동범위를 지니도록 설계하였다. 전기모터 의 회전토크로부터 구동 와이어가 감김에 따라 회전 중심을 기 준으로 양단에 선형 운동(와이어 운동)이 발생한다. 이때, 양단 의 선형 운동과 회전 중심 사이의 모멘트 암(moment arm)이 대 칭성을 유지하며 와이어에 동일한 스트로크(stroke) 변화를 발생시킨다.
또한 구동 와이어가 말단부(moving plate)에 설치된 1단 움 직도르래(tackle)을 경유하여 기저부(base plate)의 고정 도르 래(block)에 고정함으로써 모터의 당김 힘이 반감되는 원리를 적용하였다. 이는 공간의 제약이 많은 의수 개발에 있어서 단 일 구동기 및 소형 용량 모터 선정이 가능하다는 이점을 지닌다. [Fig. 5]는 개발된 손목 메커니즘의 제작 및 위치 제어 기반의 동작을 나타내며 [Fig. 4]와 동일한 관절 가동범위를 가진다는 것을 보여준다. 하단부에 구동기를 배치하였고, 또한 절단부 와 연결되는 소켓과 접합되도록 설계하였으며, 상단부에 개발 된 의수가 직접 연결되도록 설계하였다.
![[Fig. 5]](/xml/26122/JKROS-14-3-228_F5.jpg "[Fig. 5]")
Implementation of the wrist mechanism prototype and the motion snapshots: (a) extension. (b) neutral position (c) flexion
2.3 전완용 소켓 디자인
전완용 소켓은 의수 사용자들이 일상생활에서 편리하게 착 용할 수 있고, 개인 맞춤형 사이즈 조절이 가능하도록 제작하 였다. 제안된 소켓은 관련 선행 조사 및 아이디어 스케치와 렌 더링 작업((주)오트 수행)을 거쳐 제작하였다. 전체 소켓의 무 게는 약 255 g으로 기존 소켓들 보다 가벼우며, 소켓에 사용된 재료는 강한 내구성을 위해 ABS (acrylonitrile butadiene styrene copolymer)수지를 사용하였다. 소켓은 유연한 소재인 벨크로 (velcro) 스트랩을 이용하여 전체적으로 절단 부위를 감싸고, 소켓 커버로 이중 고정되도록 제작하였다[Fig. 6].
![[Fig. 6]](/xml/26122/JKROS-14-3-228_F6.jpg "[Fig. 6]")
The developed socket. (a) Design rendering. (b) Prototype
절단이 발생한 후 시간이 많이 지나면 절단 부위의 운동이 줄어들고, 이에 따라서 근육량이 감소하면서 전완 절단 부위 의 크기 및 형상이 변한다. 형상이 약간씩 변할 때마다 소켓을 새롭게 제작해야 하는 번거로움을 없애고자 사이즈 조절이 가 능하도록 소켓을 제작하였다. 또한, 전완 의수용 소켓은 절단 부위의 전체를 감싸는 기존 소켓과는 달리 한쪽 면을 제거하 여 이전 연구[7]에서 제작한 [Fig. 7]과 같은 sEMG 니트(knit) 밴 드 센서와의 결합이 용이하도록 설계하였다.
![[Fig. 7]](/xml/26122/JKROS-14-3-228_F7.jpg "[Fig. 7]")
The developed sEMG knit band sensor
2.4 패턴 인식 및 분류 알고리즘
표면 근전도 신호를 이용하여 패턴 인식 및 분류를 위해 기계 학습 모델 중 하나인 다층 퍼셉트론(multilayer perceptron, in short MLP)을 사용하였다. MLP는 입력층(input layer), 은닉층 (hidden layer), 출력층(output layer)으로 구성되어있고, 입력층에 서 은닉층과 출력층 순서로 모든 노드(nodes)가 연결된 구조인 전방향(feedforward) 신경망이다. 활성 함수를 가지고 있는 노드 들은 가중치를 갖고 연결되어 있으며, 가중치를 조절하여 목표 값을 추정할 수 있다. 가중치는 MLP 출력과 목표값이 허용되는 오차 값보다 크면 오류 역전파 알고리즘(back-propagation)을 이용하여 반복적으로 학습된다[16].
사용된 MLP의 입력층의 노드는 16채널에서 출력되는 근 전도 신호이며 출력층의 노드는 실험에 사용된 5가지의 손 동 작으로 구성하였다. 또한, [Fig. 8]과 같이 은닉층에 200개의 노드를 배치하고, 활성 함수로 ReLU 함수와 Softmax 함수를 사용하여 추정 값을 출력하였다.
![[Fig. 8]](/xml/26122/JKROS-14-3-228_F8.jpg "[Fig. 8]")
Structure of multilayer perceptron for sEMG recognition and motion classification
근전도 신호를 이용한 패턴 분류 방법은 [Fig. 9]와 같은 과 정을 따른다. 취득한 근전도 데이터는 신호 처리와 특징점 추 출 과정을 거쳐 학습 데이터로 생성되어 MLP에 적용시킨 후, 적절한 가중치를 얻어내어 패턴 분류를 수행하였다. 이렇게 학습을 마친 MLP를 검증하기 위해 TCP/IP를 통해 획득한 실 시간 근전도 신호를 테스트 데이터(test dataset)로 생성하여 MLP에 적용하여 전완 의수를 제어하기 위한 패턴을 출력하였 다. 근전도 신호의 특징점 추출은 Mean Absolute Value MAV), Root Mean Square RMS), Zero Crossing ZC) 등 시간 영역에서 근전도 신호를 처리하는 여러 방법들이 존재하지만[17], 본 연 구에서는 연산이 간단하고 비교적 우수한 성능을 보이는 RMS를 사용하였으며, 다음과 같다.
![[Fig. 9]](/xml/26122/JKROS-14-3-228_F9.jpg "[Fig. 9]")
Schematic diagram of motion classification
| (1) |
여기서 N은 윈도우의 크기, xi는 근전도 데이터이며, X는 RMS 값이다. 식 (1)을 이용하여 추출된 특징점은 0이상의 값 으로 최소-최대 정규화(Min-Max)방법을 이용하였다. 식은 아래와 같다.
| (2) |
본 연구에 사용된 MLP 모델의 입력층 노드 개수를 i개, 은 닉층 노드 개수를 j개, 출력층 노드 개수를 k개라고 가정할 때, hj는 j번째 은닉층 노드를 의미한다.
| (3) |
여기서 가중치 wij는 입력층 i번째 노드와 은닉층 j번째 노 드를 연결시키는 가중치를 의미하며, ai는 입력층 i번째 노드 인 정규화된 i번째 근전도 신호이다. hj는 활성화 함수로서 softmax 함수를 이용하여 출력층의 입력 값으로 이용되며 추 정 값 yk가 출력된다. 식은 아래와 같다.
| (4) |
여기서 출력 값 yk는 학습 데이터의 목표값을 비교하여 오 차를 최소화 시키기 위해 MLP를 반복적으로 훈련시킨다. 본 연구에 사용된 목적 함수(objective function)는 교차 엔트로피 오차(cross entropy error)를 사용하였으며, 식은 다음과 같다.
| (5) |
여기서 tk는 True label을 나타내며 데이터를 중복 없이 표현 하기 위해 원-핫 인코딩(one-hot encoding)을 사용하여 표현하였다.
3. 실험 방법 및 결과
3.1 실험 대상
본 연구는 한양대학교 기관 생명윤리위원회(Institutional Review Board: IRB)에서 2018년 7월(HYI-16-05505) 최종 승 인을 받은 후에 진행하였다. 본 연구의 대상은 신체 건강한 성 인 남녀 5명과 오른쪽 전완 절단자 1명을 대상으로 선정하였 다. 모든 피험자들에게 연구 목적 및 실험 절차에 대한 충분한 설명을 제공한 후 동의를 얻어 실시하였다. 개발된 전완 의수 에 대한 실용성을 확인하기 위해 전완 다자유도 의수 동작 생 성과 sEMG 패턴 인식 분류 실험을 실시하였다.
3.2 실험 결과
9자유도 손, 1자유도 손목 그리고 소켓을 포함하는 다자유도 (multi-DoFs) 전완 의수를 이용하여 일상생활 활동(activity of daily living)에 필요한 동작을 실시하였다. [Fig. 10]과 같이 물 체의 고정력을 위한 강한 파지(power grasping) 동작과 작고 얇 은 물체를 정밀하게 잡을 수 있는 정밀 파지(precision grasping) 동작으로 분류하였다.
![[Fig. 10]](/xml/26122/JKROS-14-3-228_F10.jpg "[Fig. 10]")
Grasping postures using multi-DoFs forearm prosthesis
부드러운 곡선 형태의 공이나 물병을 집는 동작을 수행할 경우, 모든 손가락이 굴절하여 물체를 강하게 고정하였으며, 종이와 같이 얇은 경우, 엄지가 굴절하면서 검지를 사용하여 물체를 고정하였다. 정밀 파지 동작의 경우, 엄지, 검지, 그리 고 중지를 이용하여 고정하였다. 다양한 물체를 파지하기 위 해서 작은 물체일수록 엄지의 역할이 중요하였고 검지, 중지 로 고정할 수 있었다. 추가로 전완 절단자를 대상으로 일상생 활 활동에서 필요한 동작인 ‘운동화 끈 묶기’를 실시하였다. [Fig. 11]과 같이 절단 부위에 소켓을 착용한 후 의수의 엄지와 검지의 굴절과 신전을 반복하여 운동화 끈 묶기 동작을 구현 하였다.
![[Fig. 11]](/xml/26122/JKROS-14-3-228_F11.jpg "[Fig. 11]")
Tying up shoe
패턴 인식 및 분류 실험은 근전도 신호를 MLP에 적용하여, 사용자의 의도에 따라 다자유도 의수를 위한 피험자들의 동작 들을 분류할 수 있는지 알아보기 위해 실시하였다. 피험자들은 [Fig. 12]와 같이 오른쪽 전완 부위에 착용한 후, 실험 진행자의 지시에 따라 진행되었다. 근전도 신호 획득은 각 동작에 대하 여 최대 자발적 수축(MVC, maximum voluntary contraction)을 약 20초간 수행하였다. 패턴 인식을 위한 동작으로 [Fig. 13]에 보이듯이 주먹(grasping), 굴곡(flexion), 신전(extension), 내전 (adduction), 외전(abduction)으로 선정하였다.
![[Fig. 12]](/xml/26122/JKROS-14-3-228_F12.jpg "[Fig. 12]")
Fabric band sensor and its electrode locations
![[Fig. 13]](/xml/26122/JKROS-14-3-228_F13.jpg "[Fig. 13]")
Five postures for pattern classification
전완을 구성하는 근육은 손과 손목의 움직임과 관련되어 있으며 5개의 동작에 따라 발생되는 16개의 근전도 신호를 초 당 1000개씩 각각 채널 별로 10,000개의 RMS 데이터를 추출 하였다. 획득된 근전도 신호는 INTAN RHS200 chip을 사용하 여 증폭하였으며, 노이즈 제거를 위해 밴드패스필터(bandpass filter of 8~200 Hz)와 노치필터(60 Hz)를 사용하였으며, 300 ms 윈도우 크기의 제곱평균제곱근(RMS, root mean square) 연 산을 적용하였다. 이러한 과정을 거쳐 얻은 학습 데이터는 앞에 서 언급한 알고리즘 방법에 따라 MLP의 학습 데이터로 사용하 였다. Learning rate는 0.0001로 설정하였고, Epoch는 개별 학습 과 전체학습으로 분류하여 각각 2000번과 4000번 학습시켰다. 본 연구를 위한 신호 처리 및 기계 학습은 ROS Opensource robotics funds, Willow Garage, USA)와 MATLAB R2018a (MathWorks, Natick, MA, USA)을 이용하였다.
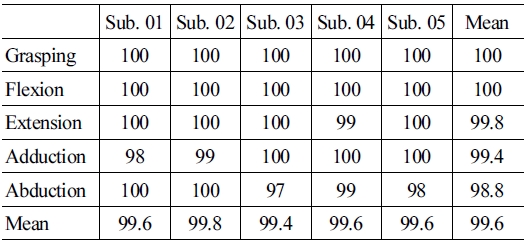
5가지 동작에 대한 근전도 신호의 예는 [Fig. 14]에 제시하 였고, 보이듯이 동작에 따라 다른 패턴이 나타났다. 특히, 긴 엄지 굽힌근(flexor pollicis longus) 부근에 위치한 ch.8의 신호 는 주먹 동작을 제외하고 모든 동작에서 높게 나타났다. 주먹 동작에서는 손바닥과 이어져 있는 근육인 장자근(palaris longus) 부근에 위치한 ch.2의 신호가 가장 높게 나타났다. [Table 1]은 5명의 피험자에 대한 동작별 패턴 인식(분류)률을 나타낸 것이다. 전체 피험자에 대한 평균은 99.6%이고, 주먹 과 굴곡 동작에 대하여 100% 인식률로 가장 높았으며 신전, 내 전, 외전 순으로 나타났다. 따라서, 5가지 동작에 대한 인식률 은 모두 99% 이상으로 동작에 대한 인식 및 분류의 정확성을 확인하였다.
![[Fig. 14]](/xml/26122/JKROS-14-3-228_F14.jpg "[Fig. 14]")
Muscle activations expressed by RMS values of sEMG signals

Results of pattern recognition and classification for hand postures
추가적으로 전체 피험자의 50,000개(=10,000 데이터 x 피험자 5명)에 대하여 패턴 인식 및 분류 실험을 실시하여 [Fig. 15]의 결과를 얻었다. 전체 인식률은 97.31%로 높게 나타났다. 주먹 동작이 99% 인식률로 가장 높았으며, 내·외전 동작의 인식률 이 98%로 굴신 동작 97%보다 조금 더 높게 나타났다. 이에 따 라 전체 피험자에 대한 인식률은 개인별 인식률 보다 조금 낮 았으나 성능에 대한 차이는 미미한 수준으로 확인하였다.
![[Fig. 15]](/xml/26122/JKROS-14-3-228_F15.jpg "[Fig. 15]")
Confusion matrix of five postures when MLP was trained using RMS sEMG data of five subjects
4. 결 론
본 연구는 일상생활 활동을 위한 전완 절단자용 다자유도 의수 및 근전도 인식/분류 시스템을 개발하는 것이다. 9자유도 의 손과 1자유도 손목을 결합하여 로봇 의수를 설계하였으며, 이를 절단 부위와 연결해 주는 착용감을 고려한 소켓을 제작 하였다. 더 나아가 로봇 의수 제어를 위해 표면 근전도를 기계 학습에 적용하여 사용자의 의도에 따라 구동할 수 있는 시스 템을 설계하였다. 개발된 전완 의수와 인식 시스템에 대한 성 능 평가를 위하여, 전완 의수 적용과 sEMG 패턴 인식/분류 실 험을 실시하였다. 첫 번째로, 일상생활에서의 파지 동작 실험 을 수행하였다. 공, 물병, 종이, 연필 등 물체의 모양과 크기에 따라 강한 파지와 정밀 파지 동작을 구분하여 수행할 수 있었 다. 또한, 사고로 인해 오른쪽 전완부가 절단된 피험자를 대상 으로 의수 착용 시연을 실시하였으며, 양 손을 사용해야 하는 ‘운동화 끈 묶기’ 동작을 다자유도 의수를 사용하여 구현할 수 있었다. 두 번째로는 근전도 패턴 인식/분류를 이용한 의수 구 동 성능 평가를 실시하였다. 일상생활에 필요하다고 판단되는 5가지 동작에 대한 패턴 인식 및 분류에 대하여 전완에서 표면 근전도를 취득하여 MLP에 적용하였으며, 그 결과 높은 인식 성능을 보였다. 굴신과 내/외전에서 주먹 동작에 비해 낮은 성 능을 보였지만 성능 차이는 미미한 수준으로 확인하였다. 이러 한 결과는 생체 모사를 추구하는 의수에 관한 후속 연구에 적 용될 수 있다. 또한, 본 연구에서는 의수 제작과 근전도 패턴 인 식률을 분리하여 연구하였으나, 개발한 의수와 근전도 시스템 의 실시간 통합 제어에 관한 추후 연구 주제를 남겨두고 있다.
Acknowledgments
This work was supported by the Convergence Technology Development Program for Bionic Arm through the National Research Foundation of Korea funded by the Ministry of Science, ICT and Future Planning, South Korea, under NRF-2015M3C1B2052811.
References
-
K. Ziegler-Graham, E. J. MacKenzie, P. L. Ephraim, T. G. Travison, and R. Brookmeyer, “Estimating the prevalence of limb loss in the United States: 2005 to 2050,” Archives of physicalmedicine and rehabilitation, vol. 89, no. 3, pp. 422-429, 2008.
[https://doi.org/10.1016/j.apmr.2007.11.005]

-
E. A. Biddiss and T. T, Chau, “Upper limb prosthesis use and abandonment: a survey of the last 25 years,” Prosthetics and orthotics international, vol. 31, no. 3, pp. 236-257, 2007.
[https://doi.org/10.1080/03093640600994581]
- C. W. Moran, “Revolutionizing prosthetics 2009 modular prosthetic limb-body interface: Overview of the prosthetic socket development,” Johns Hopkins APL Technical Digest, vol. 30, no. 3, pp. 250-255, 2011.
-
N. V. Iqbal and K. Subramaniam, “A review on upper-limb myoelectric prosthetic control,” IETE Journal of Research, vol. 64, no. 6, pp. 740-752, 2018.
[https://doi.org/10.1080/03772063.2017.1381047]
-
M. A. Oskoei and H. Hu, “Myoelectric control systems-A survey,” Biomedical signal processing and control, vol. 2, no. 4, pp. 275-294, 2007.
[https://doi.org/10.1016/j.bspc.2007.07.009]
-
F. Lunardini, C. Casellato, A. d’Avella, T. D. Sanger, and A. Pedrocchi, “Robustness and reliability of synergy-based myocontrol of a multiple degree of freedom robotic arm,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 24, no. 9, pp. 940-950, 2016.
[https://doi.org/10.1109/TNSRE.2015.2483375]
-
S. Lee, M.-O. Kim, T. Kang, J. Park, and Y. Choi, “Knit Band Sensor for Myoelectric Control of Surface EMG-based Prosthetic Hand,” IEEE Sensors Journal, vol. 18, no. 20, Oct., 2018.
[https://doi.org/10.1109/JSEN.2018.2865623]
-
S. Pancholi and A. M. Joshi, “Electromyography-Based Hand Gesture Recognition System for Upper Limb Amputees,” IEEE Sensors Letters, vol. 3, no. 3, pp. 1-4, 2019.
[https://doi.org/10.1109/LSENS.2019.2898257]
-
J. U. Chu, L. Moon, and M. S. Mun, “A real-time EMG pattern recognition system based on linear-nonlinear feature projection for a mu.jpgunction myoelectric hand,” IEEE Transactions on biomedical engineering, vol. 53, no. 11, pp. 2232-2239, 2006.
[https://doi.org/10.1109/TBME.2006.883695]
- A. A. M. Lima, R. M. Araujo, F. A. G. dos Santos, V. H. Yoshizumi, F. K. de Barros, D. H. Spatti, D. H., and M. E. Dajer, “Classification of Hand Movements from EMG Signals using Optimized MLP,” In IEEE 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, pp. 1-7, 2018.
-
U. Côté-Allard, C. L. Fall, A. Drouin, A. Campeau-Lecours, C. Gosselin, K. Glette, F. Laviolette, and B. Gosselin, “Deep learning for electromyographic hand gesture signal classification using transfer learning,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 27, no. 4, pp. 760-771. 2019.
[https://doi.org/10.1109/TNSRE.2019.2896269]
- D. A. Neumann, Kinesiology of the musculoskeleta, 3rd ed. Elsevier Health Science, 2017, ch. 8 Hand, p. 256.
-
Y. Lianfa, C. Jiating, and Z. Zhifang, “Design of a novel knee prosthesis mechanism with good stability,” Int. Rob. Auto. J., vol. 4, no. 4, pp. 278-284, 2018.
[https://doi.org/10.15406/iratj.2018.04.00137]
-
P. A. Halverson, A. E. Bowden, and L. L. Howell, “A compliantmechanism approach to achieving specific quality of motion in a lumbar total disc replacement,” Int. J. spine surgery, vol. 6, pp. 78-86, 2012.
[https://doi.org/10.1016/j.ijsp.2012.02.002]
-
Y.-J. Kim, “Anthropomorphic low-inertia high-.jpgfness manipulator for high-speed safe interaction,” IEEE Trans. on Robotics, vol. 33, no. 6, pp. 1358-1374, 2017.
[https://doi.org/10.1109/TRO.2017.2732354]
-
R. Hecht-Nielsen, “Theory of the backpropagation neural network,” Neural networks for perception. Academic Press, pp. 65-93, 1992.
[https://doi.org/10.1016/B978-0-12-741252-8.50010-8]
-
A. Phinyomark, P. Phukpattaranont, and C. Limsakul. “Feature reduction and selection for EMG signal classification,” Expert systems with applications, vol. 39, no. 8, pp. 7420-7431, 2012.
[https://doi.org/10.1016/j.eswa.2012.01.102]

2017 한양대학교 의류학과(박사)
현재 한양대학교 ERICA 공학기술연구소 연구원
관심분야: Wearable Sensor, Smart textiles, and Smart clothing design

2019 순천향대학교 전자정보공학과(공학사)
현재 한양대학교 전자공학과(석사과정)
관심분야: 생체신호처리, 로봇제어
2017 경기대학교 기계시스템공학과(공학사)
현재 한양대학교 전자공학과(석사과정)
관심분야: 로봇핸드, 로봇제어
2018 한양대학교 전자시스템공화과(공학사)
현재 한양대학교 전자공학과(석사과정)
관심분야: 생체모방 메커니즘, Tensegrity, 로봇 손목

2002 POSTECH 기계공학과(공학박사)
2005 KIST 지능로봇연구센터 선임연구원
현재 한양대학교 ERICA 전자공학부 교수
관심분야: 로봇제어, 생체신호처리