기계식 중력보상 기반의 중량물 취급용 5자유도 로봇 머니퓰레이터의 개발

© Korea Robotics Society. All rights reserved.
Abstract
A robot manipulator handling a heavy weight requires high-capacity motors and speed reducers, which increases the cost of a robot and the risk of injury when a human worker is in collaboration with a robot. To cope with this problem, we propose a collaborative manipulator equipped with a counterbalance mechanism which compensates mechanically for a gravitational torque due to the robot mass. The prototype of the manipulator was designed on the basis of a four-bar linkage structure which contains active and passive pitch joints. Experimental performance evaluation shows that the proposed robot works effectively as a collaborative robot.
Keywords:
Robot manipulator, Counterbalance mechanism, Collaboration1. 서 론
최근 다양한 분야의 작업환경에서 로봇을 활용하게 되면 서 저가형 협업로봇에 대한 관심과 수요가 크게 증가하고 있다. 그러나 현재 대부분의 협업로봇은 가격 및 안전 상의 이유로 상대적으로 작은 가반하중 및 작업반경에 한정되어 있는 실정이다. 또한 중량물 취급 등 작업자의 노동부하가 큰 작업의 경우 협업을 위해 로봇의 충격력 및 동력 등을 제한하고 있어[1,2] 이러한 상황에서도 효율적으로 활용될 수 있는 로봇의 개발이 요구되고 있다.
작업자와 동일한 작업공간에서 운용되는 로봇은 협업의 특성상 비교적 저속으로 구동된다. 이에 따라 협업용 로봇 은 기존의 산업용 로봇에 비해 일반적으로 낮은 용량의 모 터 및 감속기를 필요로 하지만, 20 kg 이상의 중량물을 취급 하는 고부하 환경에서는 자중과 더불어 작업물에 의한 중력 토크가 상당하므로 고용량의 모터 및 감속기의 사용이 필수 적이다. 이러한 고용량의 동력 시스템은 로봇의 단가 및 운용비를 증가시키는 주된 요인이며, 제어 오류 및 작업자 의 부주의로 인한 충돌 발생 시에 상해 위험성을 높이기도 한다. 이러한 문제를 해결하기 위해, 기구 자중에 의한 중력 토크를 별도의 액츄에이터 없이 기계장치로만 상쇄시켜 모 터의 용량을 낮출 수 있는 중력보상 메커니즘에 대한 연구 들이 진행되어 왔다[3-7].
본 연구에서는 로봇 자중으로 인해 피치관절에 작용하는 중력토크를 완전히 상쇄할 수 있는 중력보상 장치를 갖추어 자체 동력이 매우 낮은 중량물 취급로봇을 개발하였다. 개 발된 로봇은 로봇의 1축링크에 위치한 중력보상 장치로 인 해 기구의 복잡성과 부피가 다소 증가하지만, 구동에 필요 한 에너지를 대폭 절감되어 단가 및 운용비용을 낮추면서 중력 방향에 대한 충돌 안전성 또한 향상시켰다. 또한 본 연구에서는 제안한 로봇의 시제품 제작 및 실험을 통해 관 절 토크 및 모터 용량의 감소 효과를 검증하였다.
본 논문은 다음과 같이 구성된다. 2장에서 중력보상 메커 니즘의 토크 상쇄 메커니즘과 이에 기반한 로봇의 개발에 대하여 설명하고, 3장에서는 중력보상 로봇 시제품 대한 실험을 통해 관절토크 및 모터용량의 감소 효과를 검증하였 다. 4장에서는 결론을 서술한다.
2. 중력보상 로봇
2.1 중력보상 메커니즘 기반의 저용량 구동
중량물 취급용 로봇은 그 자체로 높은 자중과 넓은 작업 범위를 가지게 되므로, 이러한 성능을 확보하기 위해서는 고용량의 모터가 필요하다. 따라서 목표 작업성능을 유지하 면서 동시에 저용량 모터로 작업이 가능 하려면, 로봇의 구동 시 관절의 필요토크를 일부 상쇄함으로써 모터의 필요 전력을 낮출 수 있는 별도의 기계적 장치가 필요하다.
일반적으로 Fig. 1과 같이 링크 및 관절로 구성된 질량 m = 50 kg, 관절에서 무게중심까지의 거리 lc = 0.75 m의 단순 1자유도 링크의 회전 시에 관절에는 중력토크와 더불어 가감속을 위한 관성토크가 인가된다. 이때 60°/s, 120°/s2의 관절 속도 및 가속도로 90°에서 0°까지 회전하는 동작에 대 하여 기구의 관절에 인가되는 관절토크는 Fig. 1(b)와 같다.

Gravitational torque of 1-DOF arm: (a) simplified model, and (b) joint torque
링크의 구동에 필요한 관절토크 중 자중에 의한 중력토크 의 비율은, Fig. 1에 제시된 바와 같이, 구간에 따라서는 최대 80%를 차지한다. 이는 모터의 출력의 대부분을 중력 토크의 보상에 사용하여야 함을 뜻한다. 따라서 자중에 의 한 중력토크를 상쇄시킬 수 있다면 마찰이 없는 환경에서 이론적으로 기존 대비 20% 수준의 모터 출력으로도 기존의 운동이 가능하다.
이와 같이 중력토크를 상쇄하면 피치 관절에 한하여 기존의 성능을 유지하면서도 저용량 구동이 가능하게 된다. 이와 같 은 중력토크 상쇄를 위해 이전의 연구에서 기어 기반의 중력 보상 메커니즘[6]을 개발하였으며, 이를 로봇에 적용하여 저전 력 구동이 가능한 협업용 중력보상 로봇을 개발하였다.
2.2 기어 기반의 중력보상 메커니즘
본 연구에서 개발된 중력보상 로봇은 기존의 무게추 및 와이어 타입의 장치에 비해 내구성 및 신뢰성이 높아 중량 물 취급로봇의 환경에 적합한 기어 기반의 중력보상 메커니 즘을 통해 기구 자중에 의해 발생되는 중력토크를 완전히 상쇄한다. 본 연구에서 개발한 중력보상 메커니즘은 링크와 기어 유닛, 롤러와 압축스프링 등으로 구성되며, Fig. 2는 중력보상 메커니즘의 구성 및 원리를 나타낸 것이다.

Principle and construction of the counterbalance mechanism based on gears
Fig. 2와 같이 마찰이 없는 1자유도 링크의 회전을 가정 할 때, 자중에 의한 중력토크 τg는 링크의 회전각 θ1에 따라 mglcsinθ1의 크기로 관절에 인가된다. 링크에 고정된 기어 1의 회전과 1:2의 기어비를 통해 기어 2는 반대 방향으로 θ2의 회전각을 갖는다. 이때 링크의 회전에 따라 기어 2의 회전중심으로부터의 거리 R 에 위치한 롤러가 초기 위치 0°에서부터 강성 k의 스프링을 압축하며, 스프링 압축거리 x에 따라 다음과 같은 스프링 복원력 Fs가 발생s한다.
| (1) |
스프링 복원력 Fs는 압축 플레이트와 맞닿은 롤러에 작 용하므로, 이에 따라 기어 2에는 보상토크 τc이 발생하게 된다.
| (2) |
이때 τc는 기어비에 의해 절반의 크기로 기어 1에 전달되 고, θ1 = 2θ2 이므로 관절에서 작용하는 보상토크는 다음과 같다.
| (3) |
관절에 작용하는 중력토크 τg와 완전한 토크 밸런스를 이루기 위해서는 다음 관계식이 성립되어야 한다.
| (4) |
따라서 로봇 관절이 부담해야 할 자중(mg)과 무게중심의 위치(lc) 등 로봇의 물성치에 따라 스프링 강성(k) 및 롤러의 위치(R )를 적절히 설계함으로써, Fig. 3과 같이 이론적으로 중력토크의 완전한 상쇄가 가능하다. 이때 τr은 중력토크 τg와 보상토크 τc의 차로써 실제 관절에 인가되는 토크를 의미한다. 본 연구에서는 산업용 협업로봇에 이와 같은 기 어 기반의 중력보상 메커니즘에 기초한 중력보상 관절을 설계하였다.

Torque balance of the joint
2.3 중력보상 로봇
본 연구에서는 앞서 설명한 중력보상 메커니즘을 기반으 로 저용량 모터로도 중량물 핸들링이 가능한 로봇을 개발하 였다. 개발된 로봇은 모듈형 중력보상 장치를 포함하며, 중 력보상 관절은 평행 4절링크 구조와 연동된다. 본 절에서는 로봇의 사양과 더불어 중력보상과 관련한 링크 구조 및 관 절 설계에 대해 서술한다.
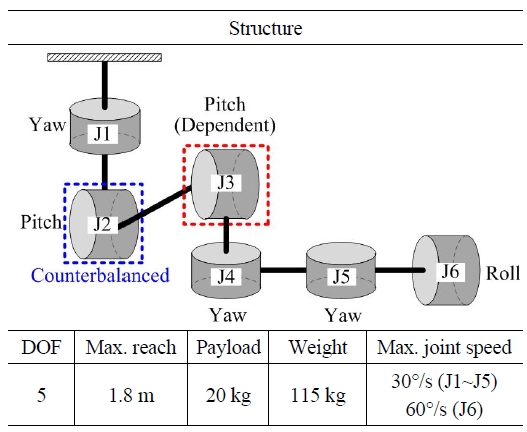
개발된 로봇은 천장 고정형으로 가반하중 20 kg, 관절별 최대 동력은 200 W로 구성된다. 또한 기구적으로 5개의 능동관절과 1개의 종속관절(J3)로 구성되며 모두 회전관절 이다. 로봇은 Table 1과 같은 사양으로 개발되었으며, 전체 로봇의 외관 및 구성은 Fig. 4와 같다.

Specifications of the robot

5 DOF collaborative robot
로봇의 상하 운동은 능동 피치관절 J2가 평행 4절링크 구조를 통해 종속관절 J3와 연동하여 결정된다. 이러한 관 절 구성에서는 로봇이 지면과 평행한 자세를 유지한 채 하 나의 피치관절(J2)로만 상하 위치를 결정할 수 있어 중력보 상 장치를 베이스 링크에 탑재하는 것이 가능하다. 평행 4절링크 구조는 Fig. 4와 같이 상단 및 하단 2쌍의 피치 관절로 구성된다.
평행 4절링크를 구성하는 2쌍의 피치관절 J2, J3에 대하 여, J3가 J2에 종속적인 변위를 가지므로 J3에 작용하는 중력토크는 J2의 관절토크에 영향을 미치지 않는다. 즉, 일 반적인 다관절 구조에서 각 관절의 중력토크가 베이스에 가까운 관절에 순서대로 누적되는 것과는 달리, Fig. 5와 같은 평행 4절링크 구조에서 i번째 링크의 하중과 작업물의 하중인 mi, ml에 의해 J2에 작용하는 중력토크는 단순히 J3에 작용하는 집중하중 ml과 링크 2의 하중 m2에 의한 토크로 계산할 수 있다. 이때 m2의 무게중심은 J2와 J3을 잇는 직선 상에 위치하는 것으로 가정하였고, 이때 J2에 작용하는 중력토크 τg는 식 (5)와 같다.
| (5) |

Structure of a parallelogram linkage
여기서 m2와 lc,2는 각각 링크 2의 무게 및 관절 2로부터 무게중심의 거리이고, ml와 lc,l은 관절 3에 작용하는 집중 하중과 이에 대한 관절 2로부터 무게중심의 거리이다. 이에 따라 중력보상 장치의 스프링 강성(k) 및 롤러의 위치(R )의 관계식은 식 (4)에 의해 다음과 같이 정리할 수 있다.
| (6) |
식 (6)에 대하여, 설계 단계에서 결정된 로봇의 물성치에 따라 m2=3.6 kg, ml=41 kg(말단 툴 포함), lc,2=0.215 m, lc,l=0.48 m를 대입하면 와 의 관계는 Fig. 6과 같이 나타난다.

k-R relation of the counterbalance mechanism
본 연구에서는 압축코일 스프링 6개를 병렬로 구성하여, Fig. 6과 같이 중력보상 장치의 강성 k=156.5 N/mm, 롤러 위치 R =71.6 mm로 설정하여 로봇 자중에 의한 중력토크를 완전히 상쇄시킬 수 있는 중력보상 장치를 설계하였다. 이에 따라 Fig. 7과 같이 중력보상 장치를 피치관절 J2에 구현하였 으며, 또한 중력보상 장치를 구성하는 스프링 및 LM 가이드 등 소모성 기구요소들을 외측에 위치하는 모듈로 설계하여 장기간 로봇 구동에 따른 유지보수성도 고려하였다.

Counterbalance mechanism and spring module
이와 같이 피치관절 J2-1에는 모터 및 감속기가 연결되 고, J2-2에는 중력보상 장치를 적용함으로써 관절의 회전 변위와 관계 없이 항상 자중에 의한 중력토크는 완전히 상 쇄된다. 이를 바탕으로 한 J2의 관절 부하 시뮬레이션에서 Fig. 8과 같은 결과를 확인할 수 있다.

Required torque of joint 2 with counterbalance mechanism
본 연구에서는 앞서 설명한 사양 및 해석 결과를 토대로 Fig. 9와 같이 협업용 중력보상 로봇 시제품을 제작하였다. 제작된 로봇은 무게 및 강성을 고려하여 알루미늄 합금(AL 6061-T6)으로 제작되었으며, 링크 1의 우측 면에는 중력보 상을 위한 스프링 모듈이 장착되어 로봇의 위치 및 자세에 관계 없이 항상 자중에 의한 영향을 완전히 보상한다. 개발 된 시제품은 부가적으로 타이어의 파지 및 이송이 가능한 그리퍼가 장착되었으며, 팔 내부의 중공형 관절 구조를 통 해 모터 및 각종 장치의 배선이 내부로 지나갈 수 있도록 하였다.

Prototype of 5 DOF collaborative counterbalance robot
3. 실험 및 성능 검증
본 연구에서는 개발된 중력보상 로봇 시제품의 실험을 통해 중력보상 장치로 인한 토크 상쇄효과를 정량적으로 검증하였다. 시제품은 관절 2에 연동된 모터 및 중력보상 장치의 작용으로 로봇의 상하 운동에 대한 동력을 제공하므 로, Fig. 10과 같이 별도의 무게를 인가하지 않은 상태에서 관절 2를 90°에서 45°까지 회전하는 동작에 대하여 최고 속도 30°/s, 가감속 시간 0.5 sec의 조건에서 관절 2의 모터 토크를 측정하였다. 일반적으로 모터의 출력 토크는 모터 전류에 비례하며, 본 실험에서는 모터 드라이버의 아날로그 전류정보를 수집한 뒤 토크상수를 고려하여 이를 출력토크 로 환산함으로써, 실제 모터 출력토크를 측정하였다. 실험 은 중력보상 장치의 유무에 따라 각각 수행되었으며, 측정 된 모터의 출력토크는 Fig. 11과 같다.

Experimental condition: motor torque of joint 2

Experimental results: motor torque of joint 2 (a) without counterbalance, and (b) with counterbalance
실험 결과, 로봇이 관절 2의 변위를 기준으로 90°에서 45° 까지 회전할 시, 중력보상 장치 없이 순수 모터의 출력으로 만 구동했을 때 (a)와 같이 최대 434.66 Nm의 출력토크가 발생되었으며, 중력보상 장치를 통해 중력토크를 보상했을 때에는 (b)와 같이 최대 215.52 Nm의 출력토크가 발생한 것을 확인하였다. 따라서 관절 2에서 중력보상 장치를 통해 219.14 Nm의 토크가 상쇄되었으며, 결과적으로 50.4%의 토크 절감 효과를 확인할 수 있다. 이는 감속기를 포함한 기구 마찰토크가 반영된 결과이다.
한편, Fig. 11(b)에서 확인할 수 있듯이 중력보상 장치를 통해 중력토크를 상쇄한 결과, 구동 전 자세유지를 하는 0~1초 구간의 모터의 출력토크가 0인 것을 알 수 있다. 실제 로 중력보상 장치를 설치한 상태에서 로봇은 무부하 상태와 마찬가지로, 모터 및 브레이크의 동작 없이도 공간 상에서 관절 변위와 관계 없이 스스로 자세를 유지할 수 있다.
4. 결 론
본 연구에서는 기계식 중력보상 장치를 사용하여 로봇의 자중에 의한 중력토크를 모터의 도움 없이 완전히 상쇄할 수 있으며, 안전한 협업이 가능한 중력보상 로봇을 개발하였다.
5개의 능동관절과 1개의 종속관절로 구성된 5자유도 중 력보상 로봇은 중력보상 장치가 효율적으로 작동할 수 있는 관절 구조를 지니며, 1개의 중력보상 장치를 탑재하면서도 넓은 작업반경을 확보하였다. 중력보상 장치로 인한 관절토 크 및 모터 용량의 감소 효과는 개발된 로봇 시제품의 실험 을 통해 검증되었으며, 이는 모터의 에너지 절감으로 이어 져 로봇의 단가 및 운용 비용을 낮출 수 있다. 또한 저용량 모터의 사용으로 협업 시의 충돌 안전성 향상에도 기여할 수 있다.
Acknowledgments
This research was supported by the MOTIE under the Industrial Foundation Technology Development Program supervised by the KEIT (No. 10048980)
References
- J. Fryman, and B. Matthias. “Safety of industrial robots: From conventional to collaborative applications,” 7th German Conf. on Robotics, ROBOTIK, 2012, pp.1-5.
- VDMA position-paper, “Safety in Human-Robot Collaboration,” http://rua.vdma.org/en/article/-/article view /4217015
-
N. Takesue, T. Ikematsu, H. Murayama and H. Fujimoto, “Design and Prototype of Variable Gravity Compensation Mechanism (VGCM),” Journal of Robotics and Mechatronics, 2011, vol.23, no.2, pp.249-257.
[https://doi.org/10.20965/jrm.2011.p0249]

- H.S. Kim, and J.B. Song. “Low-cost robot arm with 3-DOF counterbalance mechanism,” IEEE Int. Conf. on Robotics and Automation, 2013, pp.4168-4173.
-
M.A. Lacasse, G. Lachance, J. Boisclair, J. Ouellet, and C. Gosselin, “On the design of a statically balanced serial robotusing remote counterweights,” IEEE Int. Conf. on Robotics and Automation, 2013, pp.4174-4179.
[https://doi.org/10.1109/ICRA.2013.6631169]
- I. H. Kang, H. S. Kim, J. B. Song, “Counterbalance Mechanism based on Gears and Rollers,” KSME Spring Conf. on Dynamics and Control, 2013, pp.174-175
- J.T. Seo, J.H. Woo, H.Lim, and B.J. Yi, “Design of a new counter-balancing stackable mechanism,” IEEE Int. Conf. on Robotics and Automation, 2014, pp.2372-2377.

2014 고려대학교 기계공학과(공학사)
2014 ~ 현재 고려대학교 기계공학과 석사과정
관심 분야: 중력보상 및 로봇 메커니즘

1983 서울대학교 기계공학과(공학사)
1986 서울대학교 대학원 기계공설계학과(공 학석사)
1992 MIT 기계공학과(공학박사)
1993 ~ 현재 고려대학교 공과대학 기계공학부 교수
관심분야: Robot hand, Manipulation, Control