
Sorry.
You are not permitted to access the full text of articles.
If you have any questions about permissions,
please contact the Society.
мЈ„мҶЎн•©лӢҲлӢӨ.
нҡҢмӣҗлӢҳмқҖ л…јл¬ё мқҙмҡ© к¶Ңн•ңмқҙ м—ҶмҠөлӢҲлӢӨ.
к¶Ңн•ң кҙҖл Ё л¬ёмқҳлҠ” н•ҷнҡҢлЎң л¶ҖнғҒ л“ңлҰҪлӢҲлӢӨ.

Journal of Korea Robotics Society
В· Journal Abbreviation : вҖҳJ. Korea Robot.SocвҖҷ
В· Frequency : Quarterly
В· DOI Prefix : 10.7746/jkros
В· ISSN : 1975-6291 (Print)
В· ISSN : 2287-3961 (Online)
В· Year of Launching : 2006
В· Publisher : Korea Robotics Society
В· Indexed/Tracked/Covered By :

В· Frequency : Quarterly
В· DOI Prefix : 10.7746/jkros
В· ISSN : 1975-6291 (Print)
В· ISSN : 2287-3961 (Online)
В· Year of Launching : 2006
В· Publisher : Korea Robotics Society
В· Indexed/Tracked/Covered By :
Current Issue
Volume 19(1); February 2024
-
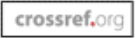
Geon Lee, Youngjin Choi
This paper presents an under-actuated robotic hand inspired by the ligamentous structure of the human hand for a prosthetic application. The joint mechanisms ar...
-
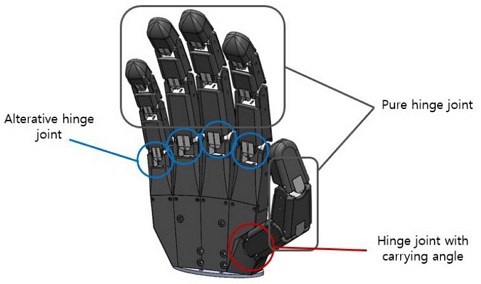
Junsik Kim, Yuna Choi, Dongchul Lee, Youngjin Choi
This paper proposes a linear model predictive control of 6-DOF remotely operated underwater vehicles using nonlinear robust internal-loop compensator (NRIC). Fi...
-
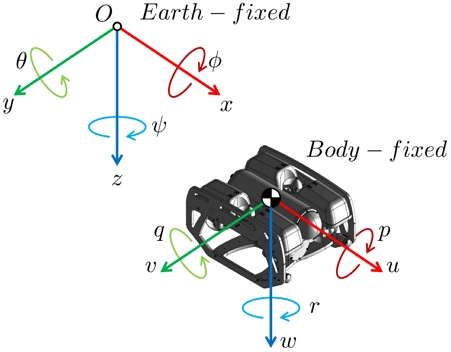
Segmentation-Based Depth Map Adjustment for Improved Grasping Pose Detection
Hyunsoo Shin, Muhammad Raheel Afzal, Sungon Lee
Robotic grasping in unstructured environments poses a significant challenge, demanding precise estimation of gripping positions for diverse and unknown objects....
-
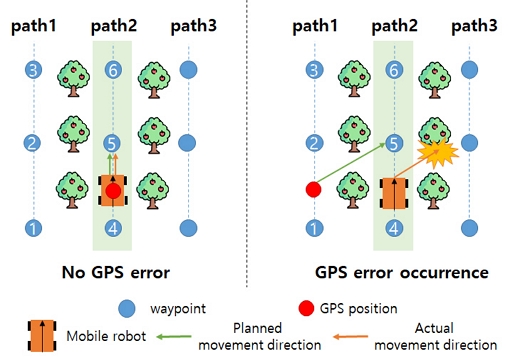
GPS Error Filtering using Continuity of Path for Autonomous Mobile Robot in Orchard Environment
Hyewon Yoon, Jeonghoon Kwak, Kyon-Mo Yang, Byong-Woo Gam, Tae-Gyu Yeo, Jongyoul Park, Kap-Ho Seo
This paper studies a GPS error filtering method that takes into account the continuity of the ongoing path to enhance the safety of autonomous agricultural mobi...
-
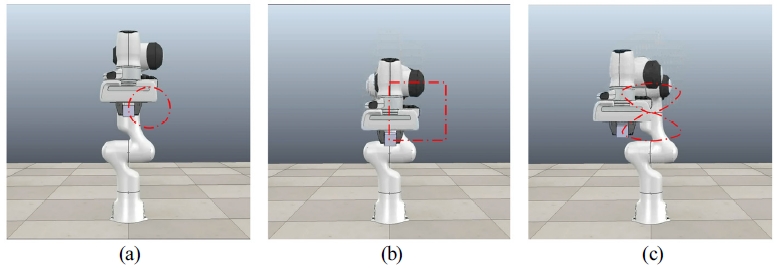
Performance Evaluation of Robotic Physics Engine for Mobile Manipulator Simulation
Kwanwoo Lee, Junheon Yoon, Suhan Park, Jaeheung Park
A mobile manipulator is capable of handling a wide range of workspaces by overcoming the limitations of mobility inherent in existing fixed-base manipulators. T...
-
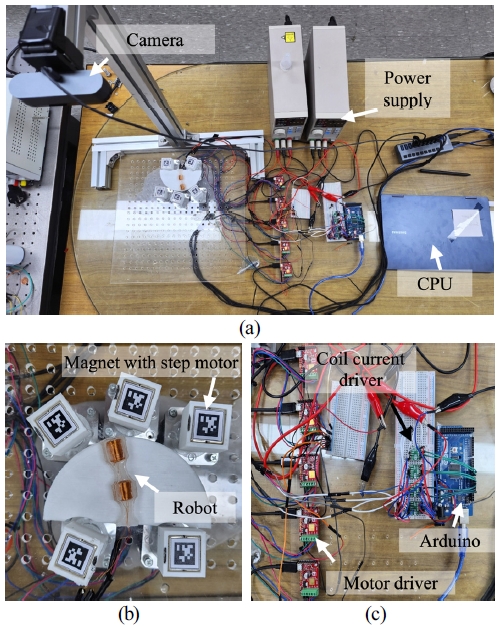
Shape Prediction Method for Electromagnet-Embedded Soft Catheter Robot
Sanghyun Lee, Donghoon Son
This study introduces a novel method for predicting the shape of soft catheter robots embedded with electromagnets. As an advancement in the realm of soft robot...
-
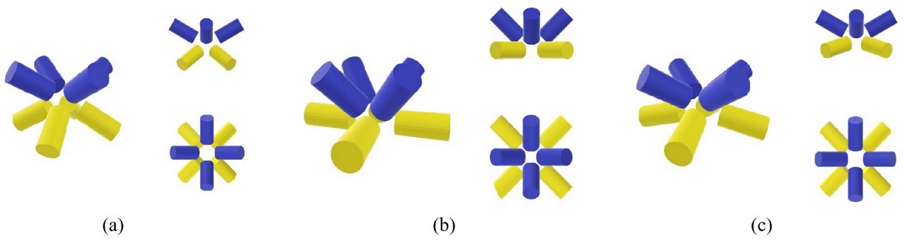
FEM-based Bayesian Optimization of Electromagnet Configuration for Enhancing Microrobot Actuation
Hyeokjin Kweon, Donghoon Son
This paper introduces an approach to enhance the performance of magnetic manipulation systems for microrobot actuation. A variety of eight-electromagnet configu...
-
Hopping Robot Using Direct-drive Method and Thermal Modeling to Analyze Motor Limitation
Myeongjin Jang, Seongyo Yang, Gwang-Pil Jung
A hopping robot can move through a confined environment while overcoming obstacles. To create a small hopping robot, it must be able to generate a large amount ...
-
HyoJae Kang, SeoHyun Yoo, YongJae Lee, Min-Sung Kang
The ability of the robot gripper to handle a wide range of objects significantly impacts its operational effectiveness. Among the robot grippers commonly used, ...
-
A Study of Tool Wear Measurement Using Image Processing
Sumin Kim, Minsu Jung, Jong-kyu Park
Tool wear is considered an important issue in manufacturing and engineering, as worn tools can negatively impact productivity and product quality. Given that th...





Copyright В© KOREA ROBOTICS SOCIETY. All rights reserved.
#504, The Korea Science and Technology Center, (635-4,Yeoksam-dong)22