기계식 중력보상 기반의 가정용 5자유도 로봇 팔

© Korea Robotics Society. All rights reserved.
Abstract
Home robot arms require a payload of 2 kg to perform various household tasks; at the same time, they should be operated by low-capacity motors and low-cost speed reducers to ensure reasonable product cost. Furthermore, as robot arms on mobile platforms are battery-driven, their energy efficiency should be very high. To satisfy these requirements, we designed a lightweight counterbalance mechanism (CBM) based on a spring and a wire and developed a home robot arm with five degrees of freedom (DOF) based on this CBM. The CBM compensates for gravitational torques applied to the two pitch joints that are most affected by the robot’s weight. The developed counterbalance robot adopts a belt-pulley based parallelogram mechanism for 2-DOF gravity compensation. Experiments using this robot demonstrate that the CBM allows the robot to meet the above-mentioned requirements, even with low-capacity motors and speed reducers.
Keywords:
Counterbalance Mechanism, Counterbalance Robot Arm, Manipulator Design, Home Service Robot1. 서 론
최근 들어 산업 자동화에 널리 사용되는 로봇 팔을 서비스 용으로 활용하기 위한 연구가 활발히 진행되고 있다. 특히, 가 정환경에서 가사노동의 부담을 덜어주기 위해 다양한 작업이 가능한 가정용 로봇이 개발되고 있으며, 이를 이용하여 세탁 기나 식기세척기 등의 가전제품으로는 완전히 대체할 수 없는 여러 가사일의 수행을 위한 연구가 진행되고 있다[1,2].
로봇이 가정환경에서 다양한 작업을 수행하기 위해서는 일 반적으로 2 kg 이상의 가반하중과 700 mm 이상의 작업반경이 필요하다. 이러한 사양을 만족하기 위해서는 고용량의 구동부 가 필요하지만, 가정용 로봇은 낮은 가격이 필수적이고, 산업 용 로봇 팔과 같이 정밀한 작업을 수행하지는 않으므로 하모 닉 드라이브와 같은 고가의 고사양 감속기 사용은 바람직하지 않다. 그러나 저사양의 모터 및 감속기 등을 사용하여 가사노 동을 수행할 정도의 가반하중을 만족시키려면 구동부의 무게 및 부피가 커져 가정환경에 적합한 소형화 설계가 어렵다. 또 한, 로봇이 가정환경을 돌아다니기 위해서는 로봇 팔이 이동 플랫폼에 탑재되어 배터리를 통해 전원을 공급받아야 하므로, 로봇 팔의 에너지 효율도 고려하여야 한다. 따라서 가정용 로 봇 팔의 상용화를 위해서는 저용량의 모터 및 저사양의 감속 기를 사용하면서도 가반하중 등의 로봇 사양을 만족시킬 수 있는 혁신적인 설계가 필요하다.
이를 위한 한 가지 방법은 기계식 중력보상 장치(counterbalance mechanism, CBM)를 사용하여 고사양 감속기 없이도 현실적 으로 사용 가능한 로봇 팔을 구성하는 것이다. 중력보상 장치 는 로봇 팔의 자중에 의한 중력토크를 상쇄하여 구동에 필요 한 토크를 절감시키는 장치로서, 일반적으로 스프링의 복원력 을 이용하여 보상토크를 생성하는 구조로 구성되어 있다. 이 러한 기계식 중력보상 장치를 사용하여 관절 부하의 대부분을 차지하는 중력토크를 상쇄시킬 수 있다면 고사양 감속기를 사 용하지 않고 저용량의 모터로도 로봇의 구동이 가능하다. 가 정용 로봇 팔의 경우 가감속이 크지 않고, 원심력 및 코리올리 효과에 의한 영향이 나타날 정도로 관절이 빠르게 움직이지 않으므로 중력보상에 의한 효과는 극대화될 수 있다.
이러한 중력보상 장치의 활용도를 높이기 위해 중력보상 을 적용할 수 있는 관절의 종류를 확장하기 위한 연구[3,4], 중력 보상의 효과를 다자유도 관절에 적용한 로봇 팔에 대한 연구[5] 가 진행되었다. 기존의 스프링-와이어를 이용한 중력보상 장 치는 스프링의 원활한 구동을 위해 LM가이드 등의 정밀 부품 을 필요로 하고, 기구가 복잡하여 제작 비용이 높았다[4]. 또한 여러 개의 스프링을 병렬로 사용하여 링크의 부피가 커지고 무게가 증가하는 단점이 있었다[5]. 최근에는 슬라이더-크랭크 와 베벨기어를 이용하여 6자유도 중력보상이 가능한 메커니즘 도 개발되었다[6]. 그러나 이러한 중력보상 장치는 LM가이드, 스 프링 샤프트, 브라켓 등 많은 부품을 사용하므로 여전히 부피가 크고, 무거우며, 구조가 복잡하다는 단점이 있다. 또한, 부품의 가격이 비싸므로 가정용 로봇 팔에 적용하기에는 한계가 있다.
본 연구에서는 기구가 단순하고, 스프링 1개만을 이용하여 부피가 최소화된 모듈형 스프링-와이어 중력보상 장치를 제 안하고, 이를 중력에 큰 영향을 받는 두 개의 피치관절에 적용 한 5자유도 가정용 로봇 팔을 개발하였다. 중력보상 장치는 링 크 내부가 아니라 베이스에 탑재되어 로봇의 링크 무게와 부 피를 최소화하였다. 이러한 중력보상 장치를 통해 로봇을 구 동하는 데 필요한 토크를 크게 낮춤으로써 저사양 모터와 감 속기의 사용으로도 로봇은 2 kg의 가반하중을 감당할 수 있다.
본 논문은 다음과 같이 구성된다. 2장에서 중력보상 장치의 원리와 소형화된 중력보상 장치의 구조에 대하여 설명하고, 3 장에서 중력보상이 적용된 가정용 로봇 팔에 대해 설명한다. 4 장에서는 실험을 통해 개발한 중력보상 로봇의 관절토크 및 모터 용량의 감소 효과와 에너지 효율 향상을 검증하고, 5장에 서 결론을 도출한다.
2. 중력보상 장치
2.1 1자유도 중력보상 장치
[Fig. 1(a)]의 1자유도 링크에 대해 질량이 m, 무게중심까지 의 거리가 lc, 지면에 수직한 기준축 y와 링크 사이의 회전 각도 가 θ일 때, 관절에 인가되는 중력토크(gravitational torque) Tg 는 다음과 같다.
![[Fig. 1]](/xml/26020/JKROS-15-1-48_F1.jpg "[Fig. 1]")
Gravitational torque of a 1-DOF arm: (a) simplified model, and (b) torque as a function of θ
| (1) |
이러한 중력토크를 상쇄하기 위해서 중력보상 장치는 [Fig. 1(b)] 와 같이 정현파로 표시되는 중력토크와 크기는 갖지만 위상이 반대인 보상토크(compensation torque or counterbalancing torque)를 생성한다.
본 연구에서 개발된 중력보상 장치는 [Fig. 2(a)]와 같이 스프 링, 와이어 및 아이들러 등으로 구성되어 있으며, 와이어의 한 쪽 끝은 스프링에, 다른 한쪽 끝은 링크에 고정되는 구조를 갖는다. 링크가 회전함에 따라 와이어가 스프링을 압축시키게 되는데, 와 이어의 인장력으로부터 생성되는 보상토크 Tc는 다음과 같다[5].
![[Fig. 2]](/xml/26020/JKROS-15-1-48_F2.jpg "[Fig. 2]")
Simplified model of spring-wire type counterbalance mechanism
| (2) |
여기서 k는 스프링상수, s0는 스프링의 초기 압축거리, a, b, c는 [Fig. 2(b)]와 같이 관절 축, 와이어 고정점 및 아이들러 고 정점 간의 거리를 각각 의미한다.
중력보상 장치가 링크의 중력토크를 완전히 보상하기 위해 서는 식 (1)로 표현되는 중력토크와 식 (2)로 표현되는 보상토 크가 동일하여야 한다. 이때, 스프링의 초기 압축거리를 s0 = (b-a)로 설정하면, Tg와 Tc 사이의 관계식에서 다음과 같이 적 절한 스프링 상수를 구할 수 있다.
| (3) |
즉, 식 (3)을 만족하는 설계변수 lc, m, a, b, k를 선정하여 중 력보상 장치를 설계하면 링크의 모든 회전각도에 대해서 기계 적인 평형을 유지할 수 있다. 본 연구에서 개발한 중력보상 로 봇 팔은 링크의 간섭으로 인해 제한되는 관절의 최대 동작범 위에 해당하는 관절2 (-90° ~ +90°), 관절 3 (-135° ~ +45°)에 대 해 모두 중력보상이 가능하다.
2.2 2자유도 중력보상 장치
중력보상 장치의 다자유도 확장은 단순히 다수의 중력보상 장치를 각 관절에 설치함으로써 이루어지지는 않는다. [Fig. 3] 과 같은 2자유도 링크에서 링크가 회전함에 따라 각 관절에는 중력토크가 인가된다. 이때 첫 번째 관절에 인가되는 중력토크 Tg1에는 관절 2에 작용하는 중력토크 Tg2가 작용-반작용에 의 해 영향을 미친다. 따라서 2개 이상의 자유도에 중력보상을 하 기 위해서는 설치되는 중력보상 장치 사이의 연동이 필요하다.
![[Fig. 3]](/xml/26020/JKROS-15-1-48_F3.jpg "[Fig. 3]")
Simplified model of 2-DOF links
2자유도 이상의 링크에 중력보상을 적용하기 위해서, 중력 보상장치를 항상 지면에 수직한 기준면(reference plane)에 설 치하는 다자유도 중력보상 기술이 제안되어 왔다[5-7]. 관절 2에 인가되는 중력토크를 다른 경로를 통해서 지면으로 전달하게 되면 관절 1에 인가되는 중력토크 Tg2의 영향을 제거하여 1자 유도 중력보상 장치를 적용할 수 있다. 또한, 관절 2의 중력보상 장치를 기준면에 설치하여 동일한 1자유도 중력보상 장치를 적용할 수 있다.
본 연구에서는 2개의 피치관절에서 지면과 수직한 각도를 항상 유지하는 기준면을 생성하기 위해 벨트-풀리 기반의 평 행사변형 기구(parallelogram mechanism)를 사용한다. 2자유 도 중력보상 장치는 [Fig. 4]와 같이 2개의 피치관절에 풀리를 설치하고, 타이밍 벨트를 이용해 연결된다.
![[Fig. 4]](/xml/26020/JKROS-15-1-48_F4.jpg "[Fig. 4]")
Parallelogram mechanism based on belt-pulley: schematic design of 2-DOF CBM
관절 1의 회전 시에는 기준면과 링크 1 사이에 장착된 중력 보상 장치가 적절한 보상토크를 생성하여 관절 1에 인가되는 중력토크를 상쇄한다. 관절 2의 회전 시에는 벨트-풀리 구조 를 통해 입력링크(input link) 2에 링크 2와 동일한 회전각도가 전달되며, 기준면과 이 입력링크 사이에 장착된 중력보상 장 치가 적절한 보상토크를 생성한다. 생성된 보상토크는 다시 벨트-풀리 구조를 통해 링크 2에 전달되어 관절 2에 인가되는 중력토크를 상쇄한다. 결과적으로 링크 1과 2는 회전각도 및 토크에 대해 상호 독립적인 관계를 이루면서 다자유도 중력보 상을 구현한다.
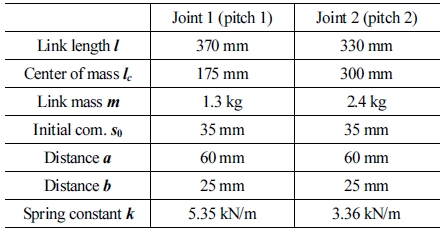
본 연구에서 개발한 중력보상 장치는 로봇의 자중과 더불 어 가반하중이 2 kg의 절반인 1 kg을 함께 보상하도록 설계되 었다. [Fig. 5]는 제안한 CBM의 중력토크, 보상토크 및 그 차이 에 대한 시뮬레이션 결과를 나타낸다. 시뮬레이션에 사용된 2 자유도 로봇과 CBM 설계에 필요한 파라미터들은 [Table 1]에 정리하였으며, 이는 설계된 중력보상 로봇 시제품의 CAD 데 이터로부터 수집되었다. 1 kg의 가반하중을 포함하면 두 관절 에서의 중력토크 최대값은 각각 11.23 N·m 및 7.15 N·m로 계 산되며, [Fig. 5]에서 중력보상 장치에 의해 생성된 보상토크에 의해 피치관절 1과 2에 인가되는 대부분의 중력토크가 보상됨 을 알 수 있다.
![[Fig. 5]](/xml/26020/JKROS-15-1-48_F5.jpg "[Fig. 5]")
Torque simulation results of 2 DOF CBM: (a) joint 1 (CBM 1) and (b) joint 2 (CBM 2)

Design parameters for CBM
2.3 중력보상 장치의 경량화 및 저가화
기존의 중력보상 장치[5-7]들은 [Fig. 6(a)]와 같이 2개 이상의 압축 스프링을 조합하여 사용하고 LM 가이드, 스프링 샤프트, 브라켓 등의 많은 부품을 사용하여 구조가 복잡하고 부피가 크고, 무겁다. 또한 15 N·m의 보상을 위해 약 168,000원의 제 작 비용이 필요하다. 본 연구에서는 가정에서 사용할 경량형 로봇 팔에 적합하도록 와이어 기반의 경량화된 저가형 중력보 상 장치를 개발하였다. 개발된 중력보상 장치는 [Fig. 6(b)]과 같이 1개의 스프링과 스프링 블록, 무급유 부시, 하우징으로 구현되어 부피가 작고, 가벼우며, 가격이 낮은 부품을 사용하 여 제작 가격이 대략 77,000원이다. 따라서 제안한 경량, 저가 형 중력보상 장치의 적용으로 기존 중력보상 장치 대비 46% 정도의 낮은 가격으로 제작이 가능하다.
![[Fig. 6]](/xml/26020/JKROS-15-1-48_F6.jpg "[Fig. 6]")
Structure of CBM: (a) previous CBM and (b) proposed CBM
3. 가정용 중력보상 로봇
본 연구에서 개발한 중력보상 로봇 팔(counterbalance robot, CBR)은 가정에서 다양한 작업을 수행하기 위해서 상하운동 을 포함한 5자유도로 구성되며, 주행 플랫폼에 장착되어 사용 되는 것을 전제로 설계되었다. 로봇은 충돌 시 안전성 및 에너 지 효율을 위해서 4 kg 이하로 가볍게 설계되었으며, 다양한 작업을 위해서 780 mm 이상의 큰 작업반경을 갖는다. 가반하 중은 무거운 병 음료의 무게가 1.0 - 1.5 kg임을 고려하여 2 kg 으로 선정하였으며, 관절 2와 3에 중력보상 장치를 적용하여 모든 관절이 50 W 이하의 저용량 모터와 저사양의 감속기로 구성된다.
[Fig. 7]은 직선관절, 피치, 피치, 피치, 롤 관절 순서로 5개의 관절을 사용하는 5자유도 중력보상 로봇의 시제품이다. 관절 1(직선)은 볼 스크류로 상하 운동을 구현하고, 피치관절 2와 3 에는 2자유도 중력보상이 적용되었으며, 피치관절 4와 롤관절 5는 로봇의 말단에 위치하여 작은 관절토크로 충분하므로 중 력보상 장치 없이 구성되었다.
![[Fig. 7]](/xml/26020/JKROS-15-1-48_F7.jpg "[Fig. 7]")
Prototype of the proposed counterbalance robot
2자유도 중력보상 장치를 위해 지면과 항상 수직인 기준면 이 필요하므로, CBM 1을 위해서는 로봇 베이스를 사용하고, CBM 2를 위해서 [Fig. 4]의 벨트-풀리 기반의 평행사변형 기 구를 적용하여 기준면을 구축하였다. 각 CBM은 이들 기준면 에 장착되어 항상 지면한 수직한 면에 대해서 중력보상을 수 행한다. 기존에 개발된 중력보상 로봇은 중력보상 장치와 스 프링을 로봇의 링크에 배치하여 링크의 회전과 중력보상 장치 가 연동되는 구조를 가진다[4,5]. 그러나 중력보상 장치로 인해 로봇 링크의 부피와 무게가 증가하고, 조립이 복잡하다는 단 점이 있었다. 본 연구에서는 중력보상 장치를 모듈 형태로 설 계하여 로봇의 베이스에 쉽게 탈부착이 가능하도록 설계하였 다. 따라서 중력보상 장치의 유지 보수가 용이하고, 로봇 링크 의 무게와 부피를 최소화할 수 있다. [Fig. 8]은 로봇 팔에 설치 된 CBM 1과 2의 배치를 보여주며, [Fig. 8(a)]와 같이 관절 2와 3이 회전할 때 기준면은 절대 각도를 유지하므로 [Fig. 8(b)]와 [Fig. 8(c)]처럼 와이어로 CBM의 스프링을 적절하게 압축하여 각 관절의 중력토크를 보상할 수 있다.
![[Fig. 8]](/xml/26020/JKROS-15-1-48_F8.jpg "[Fig. 8]")
(a) Operation of 2-DOF CBM in the counterbalance robot: mechanisms of (b) CBM 1 and (c) CBM 2
중력보상 로봇 팔의 링크 구조는 [Fig. 9]와 같다. 내골격 구 조로 설계되었으며, [Fig. 9(a)]의 링크 2는 중력보상 장치의 벨 트-풀리 구조를 내부로 위치시키고, [Fig. 9(b)]의 링크 3은 모 터와 모터 드라이버를 내부로 위치시키는 등 공간을 효율적으 로 활용하면서 로봇의 부피와 무게를 최소화하도록 설계하였 다. 알루미늄 골격은 Solidworks 프로그램의 FEM 해석과 RecurDyn 프로그램의 동역학 해석을 통해 두께, 형상, 무게를 최적화하여 AL6061-T6 재질로 설계되었고, ABS 재질의 플라 스틱 커버로 링크 강성을 보완하였다. 플라스틱 커버는 로봇 의 외형을 고려해 곡면으로 디자인하였다[8].
![[Fig. 9]](/xml/26020/JKROS-15-1-48_F9.jpg "[Fig. 9]")
Endoskeleton links of the counterbalance robot: (a) link 2, (b) link 3, and (c) link structure
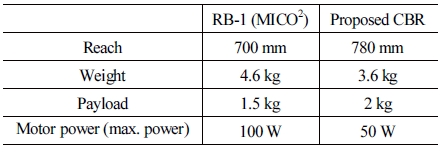
[Table 2]에 유사한 용도로 개발된 로봇 팔 중 가장 큰 가반 하중과 작업 반경을 갖는 RB-1과 제안하는 중력보상 로봇 팔 의 주요 특징을 비교하였다. 경량형 설계와 중력보상 장치의 적용을 통해 1/2 용량의 모터로 더 큰 가반하중과 작업 반경을 가지므로 제작 단가에서 큰 절감을 이룰 수 있다.
Specifications of RB-1 (MICO2) and proposed CBR
4. 실험 및 성능 검증
4.1 중력보상 메커니즘의 검증
본 연구에서는 개발된 중력보상 로봇 시제품의 중력보상 장치로 인한 토크 상쇄 효과와 중력보상 로봇의 효용성을 검 증하기 위해 [Fig. 10]과 같이 실험 환경을 구성하였다. 로봇의 말단에 1 kg의 하중이 인가된 상태에서 관절 2와 3은 최고 속 도 60º/s, 가감속 시간 0.5 s의 조건으로 각각 θ2, θ3 만큼 이동하 였다가 다시 초기자세(θ2 = θ3 = 0º)로 돌아가도록 구동된다. 이때, 모터 드라이버의 아날로그 전류 정보와 모터의 토크상 수를 고려하여 CBM의 유무에 따라 출력토크를 측정하였다.
![[Fig. 10]](/xml/26020/JKROS-15-1-48_F10.jpg "[Fig. 10]")
Experimental setup for verifying the effect of the proposed counterbalance mechanism
관절 2와 3이 [Fig. 11(a)]의 각 변위에 따라 각각 90º까지 구 동될 때 관절에는 가장 큰 중력토크가 인가되며, 이때 측정된 모터토크 그래프는 [Fig. 11(b)], [Fig. 11(c)]와 같다. CBM 없이 순수 모터의 출력으로만 로봇을 구동하였을 시에는 관절 2와 3에서 최대 22.1 N·m, 19.34 N·m의 출력 토크가 필요하였다. 한편, CBM을 장착하여 중력보상을 수행한 경우에는 관절 2와 3에는 각각 최대 4.96 N·m, 3.71 N·m의 토크만 필요하였으며, 결과적으로 70% 이상의 토크 절감 효과를 확인하였다. 이는 감속기를 포함한 기구의 마찰이 반영된 결과이며, 마찰을 배 제하면 더 큰 토크 절감 효과를 얻을 수 있다.
![[Fig. 11]](/xml/26020/JKROS-15-1-48_F11.jpg "[Fig. 11]")
Experimental results: (a) desired angular position of joints 2 and 3, and motor torque & current of (b) joint 2 and (c) joint 3
한편, [Fig. 10]의 실험에서 CBM을 장착하지 않은 경우에는 [Fig. 11(b)]처럼 관절 2가 90º 회전 후 초기 자세로 돌아오는 과 정에서 과부하로 인해 로봇을 구동할 수 없었다. 즉, 중력보상 장치를 로봇에 적용하면 관절 토크를 상쇄하여 낮은 용량의 모터로도 로봇을 구동할 수 있다.
4.2 중력보상 로봇의 에너지 효율
중력보상 장치가 로봇의 에너지 효율에 미치는 영향을 확 인하기 위해 중력 보상 장치의 유무에 따른 구동 전류를 비교 하였다. 가정용 로봇의 다양한 작업을 고려하여 관절 2와 3은 [Fig. 12(a)]의 다양한 각 변위로 구동되었으며 이때 모터 드라 이브에서 수집되는 구동전류 데이터를 비교하였다. 관절 2와 3의 구동 조건은 4.1의 실험과 동일하며, 각 관절에서 측정된 전류는 [Fig. 12]와 같다.
![[Fig. 12]](/xml/26020/JKROS-15-1-48_F12.jpg "[Fig. 12]")
Experimental results: (a) desired angular position of joints 2 and 3, and driving current of (b) joint 2 and (c) joint 3
실험 결과, 관절 2와 3이 각각 30º, 60º, 90º로 회전할 때 CBM이 없는 상태에서는 평균 0.67 A, 1.3 A, 1.4 A 및 0.60 A, 0.87 A, 1.2 A의 전류가 필요하였으며, CBM을 장착하여 중력 보상을 수행한 경우에는 평균 0.23 A, 0.29 A, 0.31 A 및 0.22 A, 0.25 A, 0.30 A의 전류가 필요하였다. 결과적으로, 다양한 동작 에서 평균 구동전류가 확연하게 작아졌으며, 최대 77%의 구 동전류 감소 효과를 확인하였다. 한편, [Fig. 12(b)]에서 보듯 이, CBM이 없는 상태에서 관절 2는 과전류로 인해 구동 범위 에 큰 제한이 있었고, 이로 인해 측정 가능한 전류의 크기가 제 한되었다. 이를 고려하면 실제 구동전류 감소 효과는 실험에 서 보다 크게 된다.
[Fig. 13]에서는 구동전류 감소에 따른 에너지 효율 상승 효 과를 보다 직관적으로 확인할 수 있다. 구동이 가능한 관절 각 도(θ2 = θ3 = 30º)로 관절 2와 3을 동시에 구동할 경우 중력보상 장치를 제거한 상태에서는 평균 1.27 A, 중력보상 장치를 설치 한 상태에서는 평균 0.45 A의 전류가 필요하다. 24 V의 동일한 전압조건으로 구성된 중력보상 로봇을 위의 조건의 동일한 동 작을 반복할 때 관절 2와 3에서 필요한 전력은 [Fig. 13]에서와 같이 시간에 비례하여 차이가 커지게 된다. 따라서 다양한 작업 이 필요한 가정용 로봇에 중력보상 장치를 적용하면 구동에 필 요한 평균 전류가 줄어드므로 에너지 효율이 높아진다.
![[Fig. 13]](/xml/26020/JKROS-15-1-48_F13.jpg "[Fig. 13]")
Energy consumption over time at 24 V
5. 결 론
본 연구에서는 가정용 로봇 팔에 적합한 기계식 중력보상 장 치를 제안하였으며, 이를 기반으로 5자유도 중력보상 로봇 팔 을 개발하였다. 시뮬레이션과 실험을 통하여 중력보상 장치의 성능을 검증하였으며, 중력보상 로봇의 에너지 효율을 측정하 였다. 이러한 연구를 통하여 다음과 같은 결론을 도출하였다.
- 제안된 2자유도 중력보상 장치는 기존의 장치에 비해서 부 피와 무게가 상당히 경감되었고, 저가의 부품으로 구성하 여 제작 단가를 40% 이상 낮추었다.
- 동일한 가반하중과 로봇의 동작에 대해서, 중력보상 장치의 장착 시에는 미장착 시에 비해서 대략 60-75%정도 모터의 구동전류가 감소하였으며, 이에 따라 감속기 등에서의 마찰 토크를 고려하더라도 70% 이상의 모터토크가 절감되었다
- 중력보상 장치의 장착으로 기존의 고용량 모터 및 고사양 감속기 대신에 저용량 모터 및 저사양 감속기의 사용이 가 능하게 되어, 유사한 가반하중과 작업 반경을 갖는 다른 로 봇에 비해서 제작 단가를 50% 이상 획기적으로 절감할 수 있었다.
향후에는 중력보상 장치를 연속된 2개의 피치관절 외에도 롤-피치 관절이 복합적으로 구성되는 로봇에 적용 가능하도 록 개선하고, 가사 일에 적합한 그리퍼의 개발을 통해서 보다 상용화에 근접한 가정용 중력보상 로봇 팔을 개발할 예정이 다. 또한 로봇을 활용한 강화학습의 저가형 플랫폼으로 활용 이 가능하다[9,10].
Acknowledgments
This research was supported by the MOTIE under the Care Robot Technology Development Program supervised by the KEIT (No. 20005002)
References
-
H. Qian, X. Wu, and Y. Xu, “The state of the Art in Service Robotic System Design,” Household Service Robotics, 1st ed. Academic Press, ch. 2, sec. 1, pp. 19-34, 2014.
[https://doi.org/10.1016/B978-0-12-800881-2.00002-5]

- S. -J. Lee and S. Jung, “Novel Design and Control of a Home Service Robot for Korean Floor-Living Life Style: KOBOKER,” 2011 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, South Korea, pp. 863-867, 2011.
-
T. Nakayama, Y. Araki, and H. Fujimoto, “A new gravity compensation mechanism for lower limb rehabilitation,” 2009 International Conference on Mechatronics and Automation, Changchun, China, pp. 943-948, 2009.
[https://doi.org/10.1109/ICMA.2009.5246352]
-
C. Cho W. Lee, and S. Kang, “Static balancing of manipulator with hemispherical workspace,” 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, ON, Canada, pp. 1269-1274, 2010.
[https://doi.org/10.1109/AIM.2010.5695757]
-
H.-S. Kim and J.-B. Song, “Multi-DOF Counterbalance Mechanism for a Service Robot Arm,” IEEE/ASME Transaction on Mechatronics., vol. 19, No. 6, pp. 1756-1763, Dec., 2014.
[https://doi.org/10.1109/TMECH.2014.2308312]
-
H.-S. Kim, J.-K. Min, and J.-B. Song, “Multiple Degree of Freedom Counterbalance Robot Arm Based on Slider-Crank Mechanism and Bevel Gear Units,” IEEE Transactions on Robotics, vol. 32, no. 1, pp. 230-235, Feb., 2016.
[https://doi.org/10.1109/TRO.2015.2501746]
- B.-Y. Moon, “Development of counterbalance mechanism and robot manipulator applicable to complex joints,” M.S. thesis, Dept. Mechatronics, Korea Univ., Seoul, Korea, 2018.
-
Y. Eum, H. Song, Y. Kim, I. Min, D. You, and J. Han, “A Study on the Appearance Design and Behavior of a Humanoid Robot to Receive Donations Effectively,” Journal of Korea Robotics Society, vol. 14, no. 3, pp. 163-169, Sept., 2019.
[https://doi.org/10.7746/jkros.2019.14.3.163]
-
Y.-H. Yang, S.-H. Lee, C.-S. Lee, “Designing an Efficient Reward Function for Robot Reinforcement Learning of The Water Bottle Flipping Task,” Journal of Korea Robotics Society, vol. 14, no. 2, pp. 81-86, Jun., 2019.
[https://doi.org/10.7746/jkros.2019.14.2.081]
-
D. Paulius and Y. Sun, “A Survey of Knowledge Representation in Service Robot,” Robotics and Autonomous System, vol. 118,pp. 13-30, Aug., 2019.
[https://doi.org/10.1016/j.robot.2019.03.005]

2017 고려대학교 기계공학과(공학사)
2019 고려대학교 기계공학과(공학석사)
관심분야: Design of robot system, Robot joint module, Counterbalance mechanism
2014 고려대학교 기계공학과(공학사)
2014~현재 고려대학교 기계공학과 석박사 통합과정
관심분야: Control of robot system, Deep reinforcement learning

2013 고려대학교 기계공학과(공학사)
2013~현재 고려대학교 기계공학과 석박사 통합과정
관심분야: Joint torque sensor, Design of robot system, Robot joint module

1983 서울대학교 기계공학과(공학사)
1985 서울대학교 대학원 기계공설계학과 (공학석사)
1992 MIT 기계공학과(공학박사)
1993~현재 고려대학교 공과대학 기계공학부 교수
관심분야: Collaborative robots, Design and control of robotic system, Indoor/outdoor navigation, AI-based robot applications