인간의 전완 회전을 위한 원위 요척골 관절의 기구학적 모델링

© Korea Robotics Society. All rights reserved.
Abstract
This paper presents the kinematic modeling of the human forearm rotation constructed with a spatial four-bar linkage. Especially, a circumduction of the distal ulna is modeled for a minimal displacement of the position of the hand during the forearm rotation from the supination to the pronation. To establish its model, four joint types of the four-bar linkage are, firstly, assigned with the reasonable grounds, and then the spatial linkage having the URUU (Universal-Revolute-Universal-Universal) joint type is proposed. Kinematic analysis is conducted to show the behavior of the distal radio-ulna as well as to evaluate the angular displacements of all the joints. From the simulation result, it is, finally, revealed that the URUU spatial linkage can be substituted for the URUR (Universal-Revolute-Universal-Revolute) spatial linkage by a kinematic constraint.
Keywords:
Biomechanics, Forearm Modeling, Forearm Rotation, Spatial Linkage1. 서 론
인간의 전완(Forearm)은 해부학적으로 복잡한 구조를 지니 고 있으며 전완 골격은 요골(Radius)과 척골(Ulna)로 이루어져 있다. 전자는 원위부(Distal)에 손목 관절 주위로 손과 연결 되고 후자는 근위부(Proximal)에 팔꿈치 관절 주위로 상완 (Humerus)과 연결된다[1]. 전자와 후자의 원위부(Distal radius and ulna, DR and DU)와 근위부(Proximal radius and ulna, PR and PU)는 서로 연결되어 근위 요척골 관절(Proximal radio-ulna joint, PRUJ) 및 원위 요척골 관절(Distal radio-ulna joint, DRUJ)을 이룬다. 전완의 운동은 요척골 관절에서 원위 척골 (DU)을 중심으로 원위 요골(DR)이 회외(Supination) 및 회내 (Pronation)시 발생한다[2]. 이러한 동작은 문고리를 돌리거나 음료를 마시는 행위 등에 인간의 일상생활에 중요한 역할을 수행한다[3]. 전완 운동의 원리를 이해하는 것은 전완의 외과적 인 문제가 발생할 때 중요하게 다뤄질 수 있다. 특히, 전완 골 절에 의한 외상후의 각 변형(Post-traumatic angular deformity) 과 이로 인해 발생되는 제한적인 전완 운동을 파악하거나[4,5], 전완 절단(Trans-radial amputation)의 일부 소실된 운동을 복 원하기 위한 의수 개발에 있어서[6] 전완 운동의 기하학적 원리 를 이해하는 것은 대단히 중요하다.
전완의 운동을 관찰하고 이에 대한 기구학적 모델링을 정립 하려는 다양한 시도 및 연구가 진행되어 왔다. Chao와 Morrey는 카데바(Cadaver) 실험에서 방사선촬영을 이용하여 원위 요척 골 관절 운동에서 [Fig. 1(a)]와 같이 원위 척골이 어떠한 움직임 도 나타나지 않는다고 보고하였다[7]. 이를 바탕으로 Lemay와 Crago는 [Fig. 2(a)]의 전완 운동을 모사하는 공간상의 링크 구 조의 기구학적 모델을 개발하고 모의실험을 진행하였다[8]. 그 러나 원위 요척 관절 운동에서 척골의 부동(不動)은 [Fig. 2(a)]의 회내 동작에서 손의 자세를 변형시킨다. Hesselbach와 Weinberg 는 이를 보완하기 위한 모델을 [Fig. 2(b)]와 같이 제안하였다 [9,10]. 그러나 제안된 모델 또한 원위 요척 관절 운동에서 [Fig. 1(a)]와 같이 척골이 여전히 고정된 모습을 나타내며, 이에 따라 손의 위치가 척골을 중심으로 변위가 발생함을 알 수 있다.
![[Fig. 1]](/xml/26097/JKROS-14-4-251_F1.jpg "[Fig. 1]")
Three typical movments of the DRUJ: (a) stationary ulna, (b) translational ulna as abduction and adduction, and (c) circumducting ulna complexed by flexion, extension, abduction, and adduction. (b) and (c) have been also illustrated in Ref.[14]
![[Fig. 2]](/xml/26097/JKROS-14-4-251_F2.jpg "[Fig. 2]")
Typical forearm models: (a) RS model[8], (b) PURS model[9,10], (c) RRUS model[12], (d) URUR model proposed in this paper. Capital letters P, R, U, and S stand for prismatic, revolute, universal, and spherical joints, respectively
Chao와 Morrey의 주장과는 다르게 Youm은 카데바 실험에서 원위 요척골에 LED (Light Emitting Diode)를 삽입하여 전완의 운동을 관찰하였으며, 이로부터 원위 척골의 움직임을 보고하 였다[1]. Amis 또한 유사한 움직임을 언급하였다[11]. Whiteley 는 위와 같은 주장을 바탕으로 원위 척골의 움직임을 모사하 는 공간상의 링크 구조를 [Fig. 2(c)]와 같이 개발하였으며[12], 이는 [Fig. 1(b)]와 같이 원위 요척 관절 운동에서 원위 척골의 외전(Abduction)과 내전(Adduction) 동작이 손의 기울임 자세 와 위치 변위가 보상될 수 있음을 나타내고 있다. 사실, Youm 과 Amis가 언급한 원위 척골의 움직임은 팔꿈치(Elbow)의 굴 절(Flexion) 및 신전(Extension) 동작과 척골의 내전 및 외전에 의한 복합적인 동작으로 정의하였으며[1,11], 결론적으로 [Fig. 1(c)]에서와 같이 척골이 선회 동작(Circumduction)을 갖게 된 다. 이는 원위 척골이 선회함에 따라 요골의 회전 시 운동 범위 를 최소화하며, 나아가 전완의 운동이 진행되는 동안 손의 기 울임 자세 및 위치 변위가 최소화될 수 있다. 특히, Amis는 이 러한 원위 척골의 움직임을 서술하기 위하여 다음과 같이 언 급하였다 “If the other hand is wrapped around the wrist, the motion of the distal ulna can be felt.”, P. 350[13]. 이러한 연구보 고에도 불구하고 지금까지 원위 척골의 선회 동작을 모사하는 전완 운동에 대한 연구는 미비하다. Laitenberger 외 3명에 의 해 위와 같은 척골의 선회 동작에 관한 내용을 언급하였으나 이를 기구학적으로 제안하지 않았다[14]. 따라서 본 연구는 [Fig. 2(d)]와 같이 공간상의 4절 링키지(Spatial four-bar linkage)를 이용 하여 [Fig. 1(c)]의 원위 요척 선회 운동이 가능한 기구학적 모 델 개발을 목표로 한다.
본 논문의 2장에서는 제안된 전완 모델의 관절 구성 원리를 기술한다. 3장에서는 제안된 모델의 기구학을 기술한다. 4장 에서는 모의실험을 통한 각 관절의 움직임을 분석한다. 마지 막으로 5장에서는 본 연구에 대한 결론을 기술한다.
2. 관절 타입 선정
2.1 근위 요척 관절
근위 요척 관절내의 기계적 조인트 구성에 따라 원위 요척 골의 움직임을 표현할 수 있다. 원위 척골의 선회 움직임을 구 현하기 위하여 근위 척골은 굴절 및 신전과 내전 및 외전 동작 을 반드시 필요로 한다. 이에 따라 유니버셜 조이트(Universal joint)를 근위 척골에 할당한다. 또한 근위 요골은 상완골소두 (Humeral capitullum)의 매끄럽고 둥글게 돌출된 형상으로 인 하여 [Fig. 2]와 같이 대부분의 전완 모델에서 볼-소켓 조인트 (Spherical joint)가 사용된다. 그러나 근위 척골의 유니버셜 조 인트 중 팔꿈치의 굴절 및 신전에 관한 회전축과 볼-소켓 조인 트 중 하나의 회전축이 동일 선상에 놓이게 되며, 이에 따라 팔 꿈치의 운동에 관한 독립적인 자유도가 자동적으로 할당된다. 이를 제한하기 위하여 볼-소켓 조인트에서 팔꿈치의 굴절 및 신전을 관장하는 관절 회전축이 제거된 유니버셜 조인트를 할당한다. [Fig. 3]은 본 논문에서 제안하는 근위 요척 관절의 기 계적 조인트 구성을 나타낸다. 이에 따라 척골은 굴절 및 신전 과 내전 및 외전을 지니며, 요골은 내전 및 외전 동작과 전완 회 전 운동에서 반드시 필요한 회외 및 회내 동작을 지니게 된다.
![[Fig. 3]](/xml/26097/JKROS-14-4-251_F3.jpg "[Fig. 3]")
Assignment of mechanical joints at the proximal radio-ulna
2.2 원위 요척 관절
근위 요척 관절에 의한 요척골의 움직임을 수용하고 독립 적으로 할당된 관절을 종속적으로 제한하기 위한 원위 요척 관절을 구성한다. 근위 요골의 회내 및 회외 동작을 수용하고 원위 요골이 원위 척골을 중심으로 회전하기 위하여 원위 척 골에 길이방향으로 힌지 조인트(Revolute joint)를 할당한다. 이 때, 두 회전축은 동일선상에 놓이지 않으며, 이에 따라 공간 상에서 회외 및 회내 동작 시 뒤틀림이 발생한다. 또한 근위 척 골의 굴절 및 신전과 내전 및 외전을 수용해야 하므로 이와 동 일한 유니버셜 조인트를 할당한다. 이는 Whiteley가 제안한 원 위 요척 관절의 기계적 조인트 구성과 동일하다[12].
3. 기구학 해석
[Fig. 4]는 본 논문에서 제안된 전완 모델의 전체적인 도식 을 나타낸다. 링크 는 각각 척골, 원위 요 척골, 요골, 근위 요척골을 나타낸다. 특히 요골의 자체 회전 운동을 표현하고 원위 척골보다 넓은 원위 요골의 특징을 표 현하기 위하여 삼각형 링크 BCD 로 표현하였다.
![[Fig. 4]](/xml/26097/JKROS-14-4-251_F4.jpg "[Fig. 4]")
Schematic diagram of the proposed forearm model as URUU spatial linkage
3.1 모빌리티(Mobility)
제안된 모델은 공간상의 4절 링키지 구조로서 총 7개의 기 계적 조인트를 지닌 URUU 병렬형 메커니즘(Parallel or closedloop mechanism)으로 나타낼 수 있다. 이러한 링키지 메커니 즘의 자유도를 계산하기 위하여 다음과 같은 Grübler- Kutzbach 계산식을 이용한다.
| (1) |
여기에서 M, n, g, fi는 각각 자유도 개수, 링크 개수, 관절 개 수, i번째 관절에 할당된 자유도 개수를 나타낸다 ([Fig. 4]에서 i = O, A, B, C). 식 (1)에 의해 제안된 URUU 메커니즘은 1자 유도를 지닌다. 즉, M = 6(4 - 4 - 1) + 2 + 1 + 2 + 2 = 1. 또한 병렬형 메커니즘을 직렬형 메커니즘으로 가정할 때, 모든 관 절이 독립적으로 동작하는 7자유도를 지니므로 1자유도의 기 구학적 여유 자유도를 지니게 된다. 이에 따라 본 메커니즘은 자체운동(self-motion or null-motion)을 구현하는 것이 가능함 을 알 수 있다.
3.2 정기구학
[Fig. 4]를 참고하면서, 본 메커니즘이 병렬 연결에 의한 폐 루프가 아닌 직렬 연결에 의한 개루프로 가정해보자. 이 때 모 든 관절은 독립적으로 동작하며 기저프레임에 {O}대한 말단 프레임 {E}의 정기구학(Forward kinematics) 해가 다음과 같 이 주어진다.
| (2) |
여기에서 는 플루커 좌표계(Plücker coordinate)에서 i번째 관절의 초기 스크류 축(Initial screw axis) 을 나타내며, 관절의 초기 위치 ri ∈ℜ3와 회전축의 방향 벡터 에 관하여 표현된다. θi ∈ℜ는 i번째 관절 각도를 나 타낸다. 또한 는 i번째 스크류 축에 관한 지수행 렬(Matrix exponential)로서 동차변환행렬(Homogeneous transformation matrix)로 표현되며, 는 말단프레임{E}의 초기 위치와 자세에 관한 동차변환행렬이다. 만약 말 단프레임 {E} 의 위치와 자세가 초기 위치로서 기저프레임 {O}와 동일하게 위치될 때, 폐루프를 이루며 단위행렬로 정 의될 수 있다. 즉, TE =I. 두 프레임이 동일한 상태에서 각 관 절의 초기 스크류 축을 정의하기 위해 다음과 같은 가정을 필 요로 한다: 은 초기 x-y 평면에 존재한다, 나머지 은 초기 z축과 평행하다, 각 관절 사이에 연결된 링크 li ∈ℜ는 초기 설치 각도 ϕi ∈ℜ를 지닌다. 이와 같은 가정으 로부터 모든 초기 스크류 축을 아래와 같이 정의할 수 있다.
| (3) |
여기에서 는 각각 관절 위치 사이의 길이를 나타내며, 삼각함수 표기에 있어서 그리고 를 나타낸다. 식 (3)의 정의로부 터 메커니즘의 초기 자세는 전완 모델의 회외 모습을 지니게 된다. 이로부터 모든 i에 대한 li와 ϕi가 주어질 때 식 (3)을 식 (2)에 대입함으로써 각 관절의 동작에 관한 말단프레임 {E} 정기구학 해를 기저프레임 {O}에 대해서 얻을 수 있다.
3.3 역기구학
식 (3)의 스크류 축을 이용하여 말단프레임 {E}의 트위스 트(Twist) ξe ∈ℜ6가 다음과 같이 표현된다.
| (v) |
여기에서 ξi ∈ℜ6은 i번째 관절의 트위스트를 나타내며, 이 는 i번째 관절의 스크류 축 $i ′ 에 각속도 ∈ℜ가 곱해진 꼴 로 표현된다. $i ′ 는 i번째 관절의 초기 스크류 축 $i가 강체 운 동(Rigid body motion)에 영향을 받은 이후의 스크류 축을 나타 내며, 어드조인트 표현(Adjoint representation)에 의하여 아래 와 같이 나타낸다.
| (5) |
여기에서 Ad[∗]∈ℜ6×6는 어드조인트 매핑(Adjoint mapping)에 관한 연산자이다. 첫번째 관절 $1 ′ 은 항상 초기 스크류 축을 유 지한다는 점을 유의해야한다. 즉 $1 ′ = $1. 식 (4)를 행렬식으로 변 환함으로써 속도 레벨의 정기구학을 다음과 같이 얻을 수 있다.
| (6) |
여기에서 자코비안 행렬이며, 는 모든 관절의 각속도로 구성된 벡 터표현(Vector representation of angular velocity)이다. 기구학 적 여유 자유도를 지닌 직렬형 메커니즘의 속도 레벨의 역기구 학(Rate-level inverse kinematics)은 다음과 같이 나타낸다.
| (7) |
여기에서 는 자코비안 행렬의 의사 역행렬(Pseudo-inverse matrix)를, I∈ℜ7×7는 단위행렬을, ∈∈ℜ7는 자체동작의 속도에 영향을 미치는 임의의 벡터를 의미한다. 만약 말단프레임 {E}가 기저프레임 {O}와 동일한 상태를 지속적으로 유지하면서 강체 운동이 발생한다면 즉, ξe =0, 이 때 7자유도를 지닌 직렬형 메커니즘의 영공간해 (Null space solution)를 다음과 같이 얻을 수 있다.
| (8) |
여기에서 [I - J+J] ∈ ℜ7×7는 영공간으로의 투영행렬(Projection matrix)를 나타낸다. 따라서 식 (8)에 의하여 잉여 구동을 지닌 직렬형 메커니즘을 가상의 병렬형 메커니즘으로 변환함으 로써 본 논문에서 제안하는 전완 모델의 동작 분석이 가능해진다.
4. 시뮬레이션
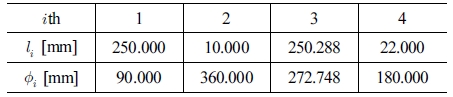
모의 실험에 앞서 식 (3)의 모든 관절 i에 대한 $i을 정의하 기 위하여 [Table 1]에 정리된 링크 길이 및 설치 각도 파라미 터 li와 ϕi가 사용된다. 이 또한 Whiteley가 사용한 값과 동일 하게 사용하였다[12].

Parameters with respect to linkage lengths and setting angles in the supination used by Whiteley[12]
4.1 제안된 전완 회전 모델
[Fig. 5]는 제안된 전완 모델이 초기 회외 자세에서 회내 자 세까지 동작하는 동안에 발생되는 모든 관절의 변위를 나타내 며, 미분방정식 (8)의 수치 적분을 통해 얻을 수 있다. [Fig. 6] 은 모든 관절의 동작에 의해 생성되는 원위 요척골 운동 및 전 체적인 전완의 움직임을 나타낸다. [Fig. 4]의 기저프레임 {O} 를 기준으로 스크류 축의 방향을 참고하면서, 근위 척골 위치 O에 관절 θ1의 동작에 의해 척골이 신전 후 다시 굴절되며 초 기 각도로 돌아온다. 이와 동시에 θ2의 회전에 의해 척골은 외 전을 일으킨다. 이에 따라 [Fig. 6]과 같이 원위 척골 위치 A가 원위 요골 B를 기준으로 아래 방향으로 반 선회하는 모습을 볼 수 있다. 또한 근위 요골 위치 C에 관절 θ6 은 초기 각도 0° 에서 -180°까지 가장 큰 가동 범위를 지니며, 이에 따라 요골의 자체 회전이 발생함으로써 [Fig. 6]에서와 같이 BD가 회외에 서 회내 동작을 수행한다. 뿐만 아니라 원위 척골 위치 A에 관 절 θ3또한 θ6와 거의 동일한 양상으로 움직인다. 중요한 점은 θ6이 l3에 대한 l4의 상대 회전을 나타내며, 말단프레임 {E}이 기저프레임 {O}에 고정된 상태이므로 고정된 l4에 의해 반대 부호를 지니게 된다. 이외에도 원위 요골 위치 B에 관절 θ4와 θ5는 요골과 척골의 비틀림 동작을 수용하는 관절 회전이 진 행된다. 지금까지 언급된 관절과는 다르게 [Fig. 5]에서 원위 요골 위치 C에 관절 θ7에서 명확한 움직임이 발생하지 않으 며, 이에 따라 [Fig. 6]에서 원위 요골 위치 B가 고정되어 있음 을 볼 수 있다.
![[Fig. 5]](/xml/26097/JKROS-14-4-251_F5.jpg "[Fig. 5]")
Angular displacements obtained by null space projection of the URUU spatial linkage and its infinitesimal angular displacements of θ7
![[Fig. 6]](/xml/26097/JKROS-14-4-251_F6.jpg "[Fig. 6]")
Distal radio-ulna view (top) and geometric view (bottom)
결론적으로 요골은 자기 자신의 길이 방향을 중심으로 회전 하며 원위 척골은 원위 요골을 중심으로 선회한다. 이 때, 요골 의 외전 및 내전이 발생하지 않는다. 따라서 전완의 회전 운동 에서 손의 위치와 자세의 변위를 최소화할 수 있게 된다.
4.2 근위 요골 관절의 기구학적 제한
[Fig. 5]의 모의실험 결과에서 원위 요골 위치 C에 관절 θ7이 미소한 움직임을 갖는 것을 보았다. 이러한 현상을 정확하게 밝 히기 위해서 [Fig. 7]은 기하학적으로 제안된 전완 모델을 두 부 분으로 나누어 나타낸다. 만약 모의실험 결과와는 다르게 θ7이 일정한 각도로 회전한다면 길이 OB 가 반드시 변화해야 한다. 뿐만 아니라 이에 대응되는 l1 과 l2 사이의 각도 ∠OAB 또한 변화해야 한다. 그러나 이러한 각도를 변화시킬 관절이 위치 A 에 존재하지 않으므로 기구학적 제한이 다음과 같이 표현된다.
![[Fig. 7]](/xml/26097/JKROS-14-4-251_F7.jpg "[Fig. 7]")
Geometric constraint of the URUU spatial linkage and its one step movement in the view seperated into the triangle ΔOAB and the triangle ΔOBC
| (9) |
여기에서 이며 설치 각도에 관한 고정 상수 값으로 표현된다. 이에 따라 각도 ∠OCB 또한 고정 값 을 지니므로 이에 관련된 θ7의 회전이 기구학적으로 제한된 다. 그러므로 [Fig. 5]에서 보이는 θ7의 결과는 미소한 움직임 이 아니며, 수치 해법에 의한 계산 오차로 볼 수 있다.
지금까지 모의 실험에 의하여 관절 $7가 전완 모델의 동작 에 관여하지 않으며 기구학적으로 제한되어 있음을 알아왔다. 만약 스크류 축 $7을 제거한다면, URUU 메커니즘에서 URUR로 변경된다. 이 때, 식 (1)에 따라 병렬형 메커니즘은 계산상으로 자 유도를 갖지 않는다. 즉, M = 6(4 - 4 - 1) + 2 + 1 + 2 + 1 = 0. 또한 직렬형 메커니즘으로 고려하였을 때, 모든 관절이 독립적 으로 동작하는 6자유도를 지니므로 기구학적 여유 자유도를 지니지 않는다. 그럼에도 불구하고 URUR 메커니즘은 URUU 메커니즘과 동일한 움직임이 가능함을 쉽게 인지할 수 있다. 이러한 메커니즘을 통상적으로 오버-컨스트레인 메커니즘 (Over-constrained mechanism)이라 한다[15]. 따라서 제안된 전 완 모델은 URUU 메커니즘에서 URUR 메커니즘으로 대체될 수 있다.
5. 결 론
본 논문에서는 인간의 전완 회전 운동에서 척골의 선회 운 동을 모사할 수 있는 모델로서 1자유도 병렬형 URUU 메커 니즘을 제안하였다. 제안된 메커니즘을 직렬형 메커니즘으 로 가정하여 가상의 폐루프를 구성하고 기구학적 여유 자유 도에 의한 영공간의 해로부터 자체 동작을 수행함으로써 전 완 운동을 구현하였다. 모의 실험을 통하여 각 관절이 관여하 는 요척골의 동작을 확인하였으며, 척골이 OB를 회전축으 로 선회함과 동시에 요골이 자신의 길이 방향 BC를 회전축 으로 회전함을 볼 수 있었다. 이에 따라 원위 요척골은 위치 B를 중심으로 회전하며, 위치 B의 부동으로 인하여 전완의 회전 운동 간에 손의 위치와 자세의 변위를 최소화할 수 있음 을 나타냈다. 마지막으로 제안된 URUU 메커니즘이 기구학 적 제한으로 인하여 URUR 메커니즘으로 대체될 수 있음을 확인하였다.
인간의 전완은 손가락을 관장하는 다양한 근육(Muscle)과 손으로부터 전달받은 외력을 분산시키고 안정성을 높이는 골 간막(Interosseous membrane)이 존재한다. 따라서 본 논문에서 제안된 모델을 기반으로 다양한 변경을 시도하여 근육의 강 성과 골간막의 적용이 전완 회전에 미치는 영향력에 관한 연구를 수행할 예정이다. 또한 이에 적합한 인공근육 연구 및 적용으로 향후 절단 의수 및 착용형 로봇의 개발에 기여 하고자 한다.
Acknowledgments
This work was supported by the Convergence Technology Development Program for Bionic Arm through the National Research Foundation of Korea Funded by the Ministry of Science, ICT & Future Planning (NRF-2015M3C1B2052811), Republic of Korea.
References
-
Y. Youm, R. F. Drye, K. Thambyrajah, A. E. Flatt, and B. L. Sprague, “Biomechanical analyses of forearm pronationsupination and elbow flexion-extension,” Journal of Biomechanics, vol. 12, no. 4, pp. 245-255, 1979.
[https://doi.org/10.1016/0021-9290(79)90067-8]

-
M. Soubeyrand, B. Assabah, M. Bégin, E. Laemmel, A. Dos Santos, and M. Crézéad, “Pronation and supination of the hand: Anatomy and biomechanics,” Hand Surgery and Rehabilitation, vol. 36, no. 1, pp. 2-11, Feb., 2017.
[https://doi.org/10.1016/j.hansur.2016.09.012]
- A. I. Kapandji, The Physiology of the Joints, Volume 1: The Upper Limb, 6th ed., Churchill Livingstone, New York, 2007.
-
P. Kasten, M. Krefft, J. Hesselbach, and A. M. Weinberg, “Computer simulation of forearm rotation in angular deformities: a new therapeutic approach,” Injury-International Journal of the Care of the Injured, vol. 33, no. 9, pp. 807-813, Nov., 2002.
[https://doi.org/10.1016/S0020-1383(02)00114-6]
-
T. Yasutomi, Y. Nakatsuchi, H. Koike, and S. Uchiyama, “Mechanism of limitation of pronation/supination of the forearm in geometric models of deformities of the forearm bones,” Clinical Biomechanics, vol. 17, no. 6, pp. 456-463, 2002.
[https://doi.org/10.1016/S0268-0033(02)00034-7]
-
M. Seo, H. Kim, and Y. Choi, “Human mimetic forearm mechanism towards bionic arm,” 2017 International Conference on Rehabilitation Robotics, London, UK, pp. 1171–1176, 2017.
[https://doi.org/10.1109/ICORR.2017.8009408]
-
E. Y. Chao and B. F. Morrey, “Three-dimensional rotation of the elbow,” Journal of Biomechanics, vol. 11, no. 1-2, pp. 57-71, 1978.
[https://doi.org/10.1016/0021-9290(78)90044-1]
-
M. A. Lemay and P. E. Crago, “A dynamic model for simulating movements of the elbow, forearm, and wrist,” Journal of Biomechanics, vol. 29, no. 10, pp. 1319-1330, Oct., 1996.
[https://doi.org/10.1016/0021-9290(96)00026-7]
-
J. Hesselbach, M. B. Helm, H. Kerle, M. Frindt, and A.-M. Weinberg, “Kinematics of the human forearms pro-and supination,” Advances in Robot Kinematics: Analysis and Control, pp. 551-560, 1998.
[https://doi.org/10.1007/978-94-015-9064-8_56]
-
A. M. Weinberg, I. T. Pietsch, M. B. Helm, J. Hesselbach, and H. Tscherne, “A new kinematic model of pro- and supination of the human forearm,” Journal of Biomechanics, vol. 33, no. 4, pp. 487-491, Apr., 2000.
[https://doi.org/10.1016/S0021-9290(99)00195-5]
-
A. A. Amis, “Part 2: Forearm, wrist, hand and fingers,” Orthopaedics and Trauma, vol. 4, no. 2, pp. 107-111, Apr., 1990.
[https://doi.org/10.1016/0268-0890(90)90043-F]
- G. P. Whiteley, “An articulated skeletal analogy of the human upper-limb,” Ph.D. dissertation, Sheffield Hallam University, UK, 2000.
-
A. A. Amis, “(iv) biomechanics of the elbow,” Orthopaedics and Trauma, vol. 16, no. 5, pp. 349-354, Oct., 2002.
[https://doi.org/10.1054/cuor.2002.0292]
-
M. Laitenberger, M. Raison, D. Perie, and M. Begon, “Refinement of the upper limb joint kinematics and dynamics using a subject-specific closed-loop forearm model,” Multibody System Dynamics, vol. 33, no. 4, pp. 413-438, Apr., 2015.
[https://doi.org/10.1007/s11044-014-9421-z]
-
C. Mavroidis and B. Roth, “Analysis of overconstrained mechanisms,” Journal of Mechanical Design, vol. 117, no. 1, pp. 69-74, Mar., 1995.
[https://doi.org/10.1115/1.2826119]
2014 한양대학교 전자시스템공학과(공학사)
2016 한양대학교 전자시스템공학과(공학석사)
2016~현재 한양대학교 전자시스템공학과 (박사과정)
관심분야: 생체모사, 메커니즘, 로보틱스

2008 한양대학교 전자컴퓨터공학부(공학사)
2010 한양대학교 전자전기제어계측공학과 (공학석사)
2015~현재 한양대학교 전자시스템공학과 (박사과정)
2011~2013 KIST 실감교류로보틱스연구센터 연구원
2013~2015 한양대학교 공학기술연구소 연구원
관심분야: 생체모사, 메커니즘, 로보틱스

2002 POSTECH 기계공학과(공학박사)
2005 KIST 지능로봇연구센터 선임연구원
현재 한양대학교 ERICA 전자공학부 교수
관심분야: 로봇제어, 생체신호처리