고속 족형 운동을 위한 생체모사 로봇의 다리 메커니즘 설계 및 제어

© Korea Robotics Society. All rights reserved.
Abstract
This paper presents mechanical design and control of a bio-inspired legged robot. To achieve a fast legged running mechanism, a novel linkage leg structure is designed based on hind legs of domestic cats. The skeletomuscular system and parallel leg movement of a cat are analyzed and applied to determine the link parameters. The hierarchical control architecture is designed according to the biological data to generate and modulate desired gaits. The effectiveness of the leg mechanism design and control is verified experimentally. The legged robot runs at a speed of 46 km/h, which is comparatively higher speed than other existing legged robots.
Keywords:
Bio-inspired, Mechanism, Design, Control, Legged Robot1. 서 론
지상 시스템은 다양한 종류의 이동 방식을 활용하고 있다. 바퀴는 자동차에서 기차에 이르기까지 가장 보편적으로 활용 되고 있으며 로봇의 이동방식으로도 많이 쓰이고 있다. 바퀴 굴림 방식은 구조가 간단하며 설계 및 제작이 용이하고 효율 이 높은 특성이 있지만 낮은 지형 적응성으로 인하여 포장도 로나, 얕은 비포장길 혹은 레일에서만 사용이 가능한 단점이 있다. 따라서 험준한 비포장 길이나 산악 지형 그리고 계단과 같은 인공 구조물에서는 이동이 제한된다.
반면 족형 이동 시스템은 바퀴에 비하여 지형 적응성이 뛰 어난 특징이 있다. 족형 이동 시스템은 발바닥의 지지점 선택 을 통하여 불연속적인 지형 및 수직 단차의 극복이 가능하다. 또한 다리의 배치와 지면 반력의 변화를 통해 다양한 자세를 취할 수 있다. 이러한 족형 이동 방식은 재난현장이나 산악지 형과 같은 불연속 지형에서 활용 가치가 높아, 현재까지 다양 한 족형 로봇 시스템에 관한 연구가 선행되어 왔다.
Planar Biped 는 MIT Leg Lab.에서 개발된 이족 로봇이다. Planar Biped의 두 다리는 각각 2 자유도로 구성되어 있으며 지 면에 닿을 때 발생하는 충격을 흡수하기 위하여 공압 스프링 을 장착하였다. Planar Biped는 회전하는 붐에 구속되어 2차원 운동을 하며 최대 21 km/h로 달릴 수 있다[1].
Cheetah는 미국 Boston Dynamics 에서 개발한 4족 보행 로봇 이다. Cheetah의 각 다리 메커니즘은 직렬로 연결된 2개의 링크 로 구성되어 있으며, 경량화 구조로 설계되었다. 각 다리의 링 크 구조는 레볼루트 조인트로 체결되어 있고 관절은 유압 실린 더에 의해서 작동한다. Cheetah는 외부에서 공급되는 유압으로 작동하며 트레드밀에서 최대 45 km/h까지 달릴 수 있다.
HyQ 는 Italian Institute of Technology 에서 개발된 4족 로봇이다. 다리에는 총 3개의 자유도가 있으며, 유압 실린더와 모터를 복합적 으로 활용하고 있다. HyQ는 trot gait로 7.2 km/h로 달릴 수 있다[2].
MIT Cheetah 는 4족 로봇으로써 생물의 다리 구조를 모방 하여 제작되었다. 기존의 4족 로봇들과 달리 MIT Cheetah는 앞/뒤의 다리가 각각 다른 구조로 제작되었으며, 각 다리의 링 크는 고속 이동 시 회전 관성 모멘트를 줄이기 위하여 어깨 및 엉덩이에 위치한 doubly concentric actuators에 의해 구동된다. Knee 및 elbow 조인트는 four-bar linkage에 의해 구동되며 Kevlar 로 이루어진 아킬레스건은 지면 반력을 완충을 하며 다 리에 가해지는 스트레스를 줄인다[3].
이상에서 언급한 족형 로봇 시스템은 다양한 지형 적응성 및 기동성의 측면에서 큰 잠재력을 가지고 있다. 하지만 바퀴 굴림 방식에 비해 효율이 낮고 이동속도가 느려 활용성이 제 한되고 있다.
본 논문에서는 족형 로봇의 이동성을 높이기 위한 생체모 사 다리 메커니즘을 제안한다. 로봇의 메커니즘은 고양이의 근골격 구조에 기반하여 설계하였으며 1자유도 링크 구조로 써 메커니즘을 단순화/경량화 하였다. 또한 생체모사형 제어 기를 기반으로 족형 로봇의 고속 움직임을 구현하였다.
본 논문의 2장에서는 고양이의 생물학적 특성을 분석하고, 3장에서는 새로운 다리 메커니즘을 제안한다. 전장부 구성과 제어기는 4장에서 서술하며 마지막으로 5장에서는 실험의 구 성과 결과에 대해 논한다.
2. 고양이 다리의 생물학적 특성
고양이과 동물은 민첩하고 유연한 몸의 구조로 지상 동물 중 가장 빠른 동물 군에 속한다[4]. 이러한 고양이과 동물의 다 리 메커니즘을 생체 모사할 경우 족형 로봇의 이동 속도를 향 상 시키는데 활용 가능 할 것이다.
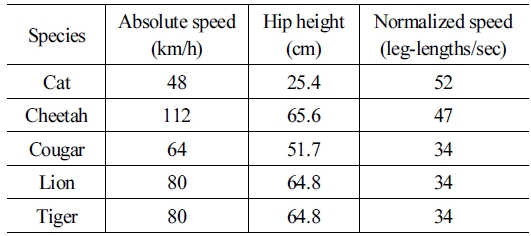
대표적인 고양이과 동물인 고양이, 치타, 퓨마, 사자, 호랑 이의 지면을 기준으로 한 절대 속도는 [Table 1]과 같다. 고양 이는 최대 속도가 48 km/h 이며 치타는 112 km/h의 속도로 달 릴 수 있다. 퓨마는 최대 64 km/h로 뛸 수 있으며, 사자와 호랑 이는 각각 80 km/h로 달릴 수 있다. 절대 속도는 개체별 최대 속도를 알 수 있는 지표이나, 개체별 체구의 특성이 반영되지 않아 운동 특성을 정확하게 파악하기 어렵다. 따라서 각 동물 의 다리 길이를 기준으로 상대속도를 측정할 경우 각 개체의 상대 운동능력을 비교 가능하다[5].

Speeds of feline species
[Table 1]의 3열에는 각 동물의 뒷다리의 평균 길이를, 4열에 는 각 동물의 절대 속도를 다리 길이로 나눈 상대 속도를 나타내었 다. 상대 속도를 기준으로 할 경우 치타는 47 leg-lengths/sec 에 그 치지만 고양이는 52 leg-lengths/sec 의 속도를 낼 수 있다. 이러한 고양이의 빠른 속도의 원리를 족형 로봇의 다리 메커니즘 개발 에 활용할 경우 이동 속도를 증대시키는데 적용가능 할 것이다.
2.1 고양이 다리의 골격 구조
고양이는 몸에 비해서 상대적으로 큰 보폭과 빠른 보행 주 기를 바탕으로 고속 주행을 할 수 있다. 특히 고양이의 뒷다리 는 앞다리에 비해서 더 길고, 큰 근육 군으로 이루어져 있어서 지면에 더 큰 힘을 가할 수 있다.
이러한 차이로 인해 앞/뒤 다리는 고양이의 이동에 서로 다른 역할을 한다. 고양이 앞다리의 수평 성분 가속도는 달리는 방향 을 기준으로 음의 값으로써 지면 충격을 완화하는 반면, 뒷다리 는 양의 가속도로써 무게 중심의 속도를 높이는 역할을 한다[6].
[Fig. 1]은 고양이 뒷다리에 직렬로 배열된 6개의 뼈(femur, tibia, metatarsal, 그리고 3개의 phalanges)의 구성을 보여준다.
![[Fig. 1]](/xml/26099/JKROS-14-4-264_F1.jpg "[Fig. 1]")
Hind limb skeletal system of feline
뒷다리 뼈 중, femur, tibia, metatarsal은 다리의 주요 움직임 을 만들어 내며 상대적으로 길이가 길다. 고양이 뒷다리의 구 조를 기계 시스템으로 모델링 하기 위하여 이들은 각각 그에 대응하는 길이의 링크로 모델링 하였다.
발가락에 해당하는3개의 phalanges 뼈는 달릴 때 지면으로 부터 전달되는 충격력을 줄이고, 고양이의 무게를 지지하며, 지면 과 다리 사이의 마찰력을 형성하는 역할을 한다. Phalanges는 짧고 구조가 복잡하며 전체 다리 궤적의 형성에 기여하는 역할이 작으 므로 기계 시스템으로의 직접적인 모델링 보다는 발가락 본연의 목적에 적합하도록 휘어진 발바닥 구조로 모델링 하였다.
[Fig. 2]는 고양이 뒷다리 뼈 구조의 모델링이다. 다리는 3-bar linkage 구조로 단순화 하였으며 metatarsal의 끝 부분은 휘어지게 디자인 하여 phalanges와 같이 발가락의 역할을 할 수 있도록 하였다.
![[Fig. 2]](/xml/26099/JKROS-14-4-264_F2.jpg "[Fig. 2]")
Modeling of the skeletal system
2.2 고양이 다리의 근육 구조
뒷다리의 근육 중, 대퇴 이두근과 사두근은 길항 근으로써 tibia를 무릎 관절에 대하여 앞뒤로 구부리는 역할을 한다. 근 육은 한쪽 방향으로만 힘을 작용 할 수 있으므로 이와 같이 쌍 을 이루는 길항근이 필요로 하는 반면, 기계 시스템에서 링크는 양방향으로의 힘 전달이 가능하다. 따라서 하나의 관절 움직임 을 구동하기 위하여 한 쌍의 길항근이 필요한 생체 시스템과 달 리 로봇 다리 메커니즘은 하나의 링크로 구현이 가능하다.
[Fig. 3]은 무릎과 발목 조인트를 수축하는데 필요한 근육인 biceps, gastrocnemius 그리고 아킬레스건을 나타낸다. 아킬레스 건은 지면 반력을 저장했다가 방출하는 스프링 요소의 역할을 담당하며 다리가 땅에 닿을 때, 충격력을 저장했다가 땅을 내딛 는 순간에 에너지를 방출함으로써 효율적이고 빠른 달리기가 가능케 한다[7]. 전체 생체 시스템에서 달릴 때 발생하는 에너지 의 35%가 아킬레스 건에 저장 가능하며[8], 이는 다리로 전해지 는 충격을 줄이고 진행 방향 가속도를 높이는 역할을 한다.
![[Fig. 3]](/xml/26099/JKROS-14-4-264_F3.jpg "[Fig. 3]")
Biceps femoris, gastrocnemius and Achilles tendon
3. 메커니즘 설계 및 제작
3.1 메커니즘 개념 설계
2장에서 언급한 고양이 다리의 생물학적 특징을 기반으 로 다리 메커니즘을 개념 설계하였다. 고양이 다리의 biceps, gastrocnemius, Achilles tendon은 기계 시스템의 대응관계에 있는 링크로 치환이 가능하다. [Fig. 4]는 다리 메커니즘의 개 념 설계이다. Biceps 링크는 femur에 대하여 tibia를 앞뒤로 움 직이고, gastrocnemius 링크는 tibia를 기준으로 metatarsal 링크 의 상대 운동을 만들어낸다. Achilles tendon은 gastrocnemius 링크 사이에 위치하여 보행시 발생하는 에너지를 저장했다 방 출하는 역할을 한다.
![[Fig. 4]](/xml/26099/JKROS-14-4-264_F4.jpg "[Fig. 4]")
Feline inspired leg mechanism
3.2 메커니즘 상세 설계
개념 설계안을 기반으로 다리 메커니즘을 상세 설계 하였 다. 다리 메커니즘은 다중 링크 구조를 활용하여 족형 로봇에 요구되는 다리의 움직임을 구현하였다.
[Fig. 5]는 최종적으로 개발된 전체 다리 메커니즘이다. 메 커니즘은 총 9개의 링크와 3개의 주요 관절로 이루어져 있다. 링크는 위에서부터 crank (A), coupler (B), femur (C), biceps (D), upper gastrocnemius (E), lower gastrocnemius (F), tibia (G), metatarsal (H)로 구성되어 있다. 두 개의 gastrocnemius 링크는 spring (I) 으로 연결되어 있다. 다리는 crank의 입력으로 움직 이는 1자유도 시스템이며 총 3개의 closed-loop로 구성된다.
![[Fig. 5]](/xml/26099/JKROS-14-4-264_F5.jpg "[Fig. 5]")
Detailed design of leg mechanism
1차 loop는 four-bar 메커니즘으로써 base, crank, coupler 그 리고 femur로 구성되어 있다. Crank는 actuator와 맞물려 있으 며 crank가 회전함에 따라 femur는 rocking움직임을 만들어 낸 다. 2차 loop는 femur, tibia, biceps, coupler 링크로 구성되어 있 다. Biceps 링크는 대퇴 사두근과 이두근 사이의 길항작용처럼 tibia를 밀고 당기면서 femur와 tibia사이의 상대 움직임을 만 들어 낸다. 3차 loop는 five-bar linkage구조로써, femur, tibia, metatarsal, upper and lower gastrocnemius 와 spring으로 구성 된다. Spring은 passive sliding joint를 형성하며 아킬레스건의 역할을 한다. Gastrocnemius 링크는 femur와 metatarsal 링크의 평행한 움직임을 만들어 내고, phalanges의 3개의 발가락뼈는 metatarsal의 휘어진 부분으로 모델링 되었다.
3.3 구동부 설계
설계된 메커니즘은 로봇의 경량화와 단순화를 위하여 구동 기를 최소화한 [Fig. 6]과 같은 1자유도 시스템으로 고안하였다.
![[Fig. 6]](/xml/26099/JKROS-14-4-264_F6.jpg "[Fig. 6]")
Quick-return mechanism
족형 로봇의 다리는 stance 구간에서는 에너지를 소모하면 서 일을 하고, swing 구간에서는 에너지 소모가 작기 때문에 일반적인 four-bar링크 구조보다 quick-return 메커니즘이 적합 하다. Quick-return 메커니즘은 등속도의 crank회전에 대해서 일을 할 땐 느리게, 일을 마치고 다음 cycle의 일을 하기 위해서 복귀할 땐 빠르게 작동하는 메커니즘으로써 일을 하는 구간에 서의 crank의 작동 범위가 길기 때문에 더 많은 에너지를 투입 할 수 있으며, 상대적으로 에너지 소모가 작은 return 구가에서 는 빠르게 이동하는 장점이 있다.
3.4 메커니즘 제작
설계안을 기반으로 이족 로봇을 제작하였다([Fig. 7]). 로봇 의 높이는 47 cm 이며 질량은 3kg으로써 유사한 크기의 이족 로봇 대비 약 20% 수준이다. 다리 메커니즘은 알루미늄으로 제작하였으며 발바닥 부분은 탄소 복합 재료로 개발하였다. 탄 소 복합소재는 고강도, 고내구성을 지니며 동시에 가벼운 구조 로써, 고속 주행시 지면에서 받게 되는 큰 충격력을 견딜 수 있 다. 또한 다리 전체의 관성모멘트를 최소화하여 고속 움직임이 가능하게 하였다. 아킬레스건은 부틸 고무로 제작하였으며 댐 핑요소를 지니고 있어서 로봇의 다리가 땅에 닿았을 때 충격력 에 의해 발생하는 잔류 진동을 억제하는 역할을 한다.
![[Fig. 7]](/xml/26099/JKROS-14-4-264_F7.jpg "[Fig. 7]")
Legged robot
4. 제어 시스템
로봇을 제어하기 위하여 [Fig. 8]과 같이 전장부를 구성하였 다. 제어기는 Matlab Simulink 의 Real-time Windows Target 으 로 작성하였다. Simulink에 의해 생성된 제어 신호는 DAQ (National Instrument, PCI-6602) 보드를 통해 모터 드라이버 (Maxon, ESCON 50/5)로 전달되어 로봇을 구동 시킨다.
![[Fig. 8]](/xml/26099/JKROS-14-4-264_F8.jpg "[Fig. 8]")
Electromechanical system setup
모터의 각도 및 각속도 데이터는 다리 모터의 MR 엔코더 (Maxon, MR 500 CPT)로 기록되며, 로봇의 높이(y), 속도(x) 및 pitch 정보는 붐에 설치된 인크리멘탈 엔코더(Autonics, E30S-4- 3000-30N-5)에 의해서 측정된다. 측정된 6개의 엔코더 정보는 DAQ보드를 통하여 다시 Simulink로 피드백 된다.
족형 로봇의 제어기는 [Fig. 9]와 같이 구성하였다. 로봇의 속도 υd가 결정되면 GPG (gait pattern generator)는 각 다리의 swing/stance 구간에서의 요구되는 속도와 타이밍을 계산하여 두 다리의 속도 프로파일을 생성한다. 속도 프로파일은 leg speed controller를 통해 각 다리의 crank의 위치 레퍼런스 값을 로봇에 전달한다. 로봇의 속도와 각 다리의 위치 값은 다시 GPG와 leg speed controller에 피드백 되어 실시간으로 속도 프 로파일이 생성/제어된다.
![[Fig. 9]](/xml/26099/JKROS-14-4-264_F9.jpg "[Fig. 9]")
Leg controller
5. 고속 주행 실험
로봇의 성능을 검증하기 위하여 주행 실험을 실시 하였다. 로봇은 정지 상태에서부터 서서히 속도를 높여가며 실험을 실 시하였고, 총 53초에 걸쳐서 각 다리의 crank는 0~36 rad/s까지 가속되었다. [Fig. 10]은 좌/우측 다리의 각속도 그래프이다. 파란색은 두 crank의 reference이며 녹색은 실제 측정 값이다.
![[Fig. 10]](/xml/26099/JKROS-14-4-264_F10.jpg "[Fig. 10]")
Angular speed of cranks
족형 로봇의 경우 저속과 고속 구간에서 다리가 땅에 닿는 비율이 달라지는데 이를 반영하기 Crank의 각속도는 0~20 rad/s 사이에는 U자형 프로파일로 입력되다가 20 rad/s 이후에 는 직선형 프로파일이 되도록 설계하였다. 각 다리는 최대 허 용 속도인 36 rad/s까지 제어 목표 값을 잘 추종하는 것을 확인 할 수 있다.
로봇의 속도는 [Fig. 11]과 같이 측정되었다. 로봇의 최대 순간 속도는 47.78 km/h로 기록 되었으며, 안정적 peak 속도는 약 46 km/h 였다. 로봇이 고속으로 달릴 때의 장면은 [Fig. 12]와 같다.
![[Fig. 11]](/xml/26099/JKROS-14-4-264_F11.jpg "[Fig. 11]")
Forward speed of the legged robot
![[Fig. 12]](/xml/26099/JKROS-14-4-264_F12.jpg "[Fig. 12]")
Snap shots of the legged robot
6. 결론 및 향후 연구 계획
본 논문에서는 고양이를 생체모사한 족형 로봇의 다리 메 커니즘 설계와 제어기에 관하여 논하였다. 생체모방 대상으로 고양이를 선정하였고 고양이의 근골격 구조 분석을 통하여 다 리 메커니즘을 설계하였다. 제안한 메커니즘은 구동부를 추가 하여 족형 로봇으로 제작되었다. 로봇을 제어하기 위하여 전 장부를 구성하였고 피드백 제어기를 개발하여 움직임을 구현 하였다. 제작된 로봇은 최종적으로 고속주행 실험을 수행하였 으며 최대 46 km/h 의 속도로 주행 가능하였다.
제안한 로봇 메커니즘은 현재 붐에 구속되어 트레드밀에서 2차원 운동을 한다. 로봇의 실용적 측면에서의 활용도를 높이기 위해서는 3차원 공간에서의 이동 및 자세 제어가 가능하여야 할 것이다. 이러한 목표를 달성하기 위하여 로봇의 최적설계, 정밀 제어 시스템 구축, 자율 주행 알고리즘 개발을 계획하고 있다.
References
- M. H. Raibert, Jr. H. B Brown, M. Chepponis, J. Koechling, J. K. Hodgins, D. Dustman, W. K. Brennan, D. S. Barrett, C. M. Thompson, J. D. Hebert, W. Lee, and L. Borvansky, “Dynamically Stable Legged Locomotion,” Massachusetts Inst. of Tech Cambridge A.jpgicial Intelligence Lab, USA, Rep. 1179, Sept., 1989.
-
M. Focchi, T. Boaventura, C. Semini, M. Frigerio, J. Buchli, and D. G. Caldwell, “Torque-control based compliant actuation of a quadruped robot,” 2012 12th IEEE International Workshop on Advanced Motion Control (AMC), Sarajevo, Bosnia-Herzegovina, 2012.
[https://doi.org/10.1109/AMC.2012.6197133]

-
A. Ananthanarayanan, M. Azadi, and S. Kim, “Towards a bio-inspired leg design for high-speed running,” Bioinspiration & Biomimetics, vol. 7, no. 4, Aug., 2012.
[https://doi.org/10.1088/1748-3182/7/4/046005]
- Natural History, 1974, v. 83, The American Museum of Natural History, 1974.
-
L. M. Day and B. C. Jayne, “Interspecific scaling of the morphology and posture of the limbs during the locomotion of cats (Felidae),” Journal of Experimental Biology, vol. 210, no. 4, pp. 642-654, 2007.
[https://doi.org/10.1242/jeb.02703]
-
R. M. Walter and D. R. Carrier, “Ground forces applied by galloping dogs,” Journal of Experimental Biology, vol. 210, no. 2, pp. 208-216, 2007.
[https://doi.org/10.1242/jeb.02645]
- C. T. Farley, J. Glasheen, and T. A. McMahon, “Running springs: speed and animal size,” Journal of experimental Biology, vol. 185, no. 1, pp. 71-86, Dec., 1993.
- A. R. McNeill, Elastic Mechanisms in Animal Movement, Cambridge University Press, 1988.
2009 성균관대학교 기계공학과(학사)
2011 KAIST 기계공학과(석사)
2015 KAIST 기계공학과(박사)
2015~현재 한국원자력연구원 선임연구원
관심분야: 생체모방 로봇, 재난 구조 로봇, 원자력로봇