소형 6족 주행 로봇의 페이로드와 다리 강성이 로봇의 주행 성능에 미치는 영향
 ; Sang-Min Baek1
; Jongeun Lee1
; Sojung Yim1
; Jae-Kwan Ryu2
; Yong-Jin Jo3
; Kyu-Jin Cho†
; Sang-Min Baek1
; Jongeun Lee1
; Sojung Yim1
; Jae-Kwan Ryu2
; Yong-Jin Jo3
; Kyu-Jin Cho†
© Korea Robotics Society. All rights reserved.
Abstract
Inspired by small insects, which perform rapid and stable locomotion based on body softness and tripod gait, various milli-scale six-legged crawling robots were developed to move rapidly in harsh environment. In particular, cockroach’s leg compliance was resembled to enhance the locomotion performance of the crawling robots. In this paper, we investigated the effects of changing leg compliance for the locomotion performance of the small light weight legged crawling robot under various payload condition. First, we developed robust milli-scale six-leg crawling robot which actuated by one motor and fabricated in SCM method with light and soft material. Using this robot platform, we measured the running velocity of the robot depending on the leg .jpgfness and payload. In result, there was optimal range of the leg .jpgfness enhancing the locomotion ability at each payload condition in the experiment. It suggests that the performance of the crawling robot can be improved by adjusting .jpgfness of the legs in given payload condition.
Keywords:
Bio-inspired, Six-Leg Crawling, Compliance, Leg .jpgfness, Payload1. 서 론
수 센티미터 크기의 작은 지상 로봇은, 크기가 큰 로봇이 들 어갈 수 없는 작은 공간이나 좁은 틈에 들어가 다양한 임무에 활용이 가능하기 때문에 많은 연구가 이루어지고 있다[1-8]. 로 봇의 크기가 작아짐에 따라 장애물이 몸체의 크기에 비해 커 지기 때문에 장애물 극복 능력이 중요해진다. 자연에서는 작 은 지상 곤충이 다리를 움직여 앞으로 나가는 6족 주행을 하 며, 주행 중 다리를 높이 들어올려 장애물을 극복할 수 있다[9]. 또한 곤충은 여섯 개의 다리 중 세 개의 다리가 번갈아 가며 몸 체를 지지하는 삼각 보행(Tripod Gait)을 이용해 안정적으로 주행한다[9]. 소형 곤충의 다리 움직임을 모사하여 RHex[1], DASH[2], HAMR[3,4], RoACH[5], VelociRoACH[6], Whegs[7] 등 다양한 소형 6족 주행 로봇이 개발되었다. 개발된 소형 6족 주 행 로봇은 삼각 보행을 기반으로 빠르고 안정적인 주행을 한다.
바퀴벌레의 경우 몸체의 유연성을 활용한 기계적 피드백으 로 다양한 상황에 쉽게 적응해 6족 주행을 한다[10,11]. 특히 50 body length/s 의 빠른 속도로 주행 할 수 있는 American cockroach ‘Peripaneta americana’는 몸체가 유연하게 변형되어 몸체보다 1/3배 낮은 작은 틈이나 공간에 들어가 주행할 수 있고, 심지어 몸 체가 1/4배의 크기로 압축되어도 손상 없이 생존이 가능하다 [12,13]. 연구자들은 6족 주행 로봇의 외골격을 만들 때, 단단한 재 료가 아닌 강성이 낮고 가벼운 재료를 사용하여 바퀴벌레의 유연 성을 모사했다[2-6,9,13]. VelociRoACH와 DASH의 경우 가볍고 유 연한 재료로 제작되어 28 m의 높이에서 낙하해서 콘크리트 바닥에 부딪혀도 부서지지 않고 정상적으로 작동한다[2,6]. 또한 [13]의 CRAM은, 유연한 재료의 배치를 통해 원래 크기의 절반 이하로 압축된 상태에서도 6족 주행을 할 수 있다.
특히 다리의 유연성은 주행 성능에 직접적인 영향을 끼친 다. 바퀴벌레는 6족 주행을 할 때 다리의 유연성을 이용해 지 면으로부터 다리가 받는 충격을 줄이고 그 일부를 에너지로 저장한다. 그리고 다리를 펴며 땅을 밀 때 다리에 저장되어 있 던 에너지를 방출하면서 가속에 도움을 얻는다[14-16]. 다리로 움직이는 동물을 모델링 할 때 다리의 유연성을 고려한 Spring Loaded Inverted Pendulum (SLIP) 모델을 주로 사용하는데, 모 델링의 결과로 특정 질량에 대해 적절한 강성이 필요함을 제 시한다[14,15,17,18]. DASH는 로봇 질량에 따른 다리의 강성을 최 적화하여 주행 성능을 높였다[2]. 또한 [19,20]에서 개발된 로봇 iSprawl은 다리와 몸체를 연결하는 hip joint spring의 강성을 최적화하여, 주행 속도를 두 배 이상 높였다.
하지만 소형 6족 주행 로봇이 실질적으로 다양한 임무 환경 에 투입되기 위해서는, 각 목적에 따라 배터리나 센서 등 추가 적인 장비가 필요하다. 이로 인해 전체 로봇의 무게(Payload) 가 증가해 주행 성능이 감소한다. 성능 감소량을 줄이기 위해 서는, payload가 없을 때보다 더 큰 다리 강성이 필요하다[21,22]. [22]에서는 다리의 측면 움직임을 제한하는 6-bar linkage를 통 해 다리의 강성을 높여, payload가 있을 때 로봇의 주행 성능을 높였다. 이에 더 나아가 주행 성능을 극대화 하기 위해서는, 로 봇의 각 payload에 따른 강성의 최적화가 필요하다.
본 논문에서는, 소형 6족 주행 로봇에서 다양한 payload와 다리 강성의 변화에 따른 주행 성능을 측정한다. 이를 통해 각 payload에 대해 최적의 주행 성능을 가지는 다리의 강성을 찾 는다. 실험에 사용된 소형 6족 주행 로봇은 DASH와 유사한 메 커니즘과 제작방식을 이용하고, 로봇의 크기를 좀 더 소형화 하여 [Fig. 1]과 같이 제작했다. 본 연구를 통해 소형 6족 주행 로봇에서 payload가 있을 때 다리의 강성 변화가 주행 성능에 어떤 영향을 미치는지 살펴 보고자 한다.
![[Fig. 1]](/xml/26100/JKROS-14-4-270_F1.jpg "[Fig. 1]")
Milli-scale six-leg crawling robot prototype including batteries and electronics
2. 설 계
소형 6족 주행 로봇의 payload와 강성의 변화에 따른 주행 성능을 신뢰성 있게 측정하기 위해서는, 견고한 6족 주행 로봇 플랫폼이 필요하다. 따라서 이 절에서는 실험에 사용된 6족 주 행 로봇 플랫폼을 설명한다.
2.1 구동부와 트랜스미션
실험에 사용된 소형 6족 주행 로봇은 DASH의 메커니즘과 유사하게 모터를 구동기로 사용하고, SCM (Smart Composite Microstructure) 방법을 통해 가볍고 유연한 재료로 제작되었 다. SCM 방법으로 제작된 flexure joint는 움직일 때 마찰이 작 다는 장점이 있지만, joint의 가동 범위가 한 바퀴 이내라는 한 계가 있다. 따라서 모터의 지속적인 회전을 다리의 움직임으 로 전환하기 위해, SCM flexure joint에 적합한 트랜스미션의 설계가 필요하다.
본 실험에서는 로봇의 방향 전환 없이 직진 주행 속도를 측 정하기 때문에, 하나의 모터를 사용해 로봇을 제작했다. 로봇 의 무게가 좌우 대칭이 되도록, 모터의 축이 로봇의 시상면에 있도록 모터를 배치했다. 다리의 회전축은 시상면 즉 모터의 회전축과 수직이기 때문에, [Fig. 2]와 같이 베벨 기어를 사용 해 모터의 회전을 양쪽 크랭크로 전달한다. 양쪽 크랭크는 하 나의 축으로 연결되어 있어 동일한 방향의 회전을 양쪽 커넥 팅 로드(Connecting rod)로 전달한다. 각 커넥팅 로드는 크랭크 에 pin joint로 연결되어, 두 커넥팅 로드가 180도의 위상 차이 로 회전한다.
![[Fig. 2]](/xml/26100/JKROS-14-4-270_F2.jpg "[Fig. 2]")
Schematic of the motor power transmission. The bevel gear shifts the motor’s direction of rotation by 90 degrees. Two cranks are connected to the same rod, so they can rotate in the same direction with a phase difference of 180 degrees
모터의 동력을 다리에 효과적으로 전달하기 위해, 커넥팅 로드를 만들 때 3D 프린터를 이용하여 Abs like 재료로 단단하게 제작했다. [Fig. 3]과 같이 두 개의 커넥팅 로드가 로봇 하단부의 각 세 개의 다리와 연결되어, 크랭크의 회전을 다리로 전달한다. 하나의 커넥팅 로드에 연결된 세 개의 다리가 삼각 형태(한 쪽의 앞, 뒷다리와 다른 쪽의 중간다리)로 배치되어, 커넥팅 로드가 회전할 때 세 다리가 동일한 위상으로 움직이며 바닥을 삼각형 형태로 지지하는 tripod gait를 구현했다. 이때 커넥팅 로드의 뒤 틀림을 막기 위해, [Fig. 4]처럼 커넥팅 로드의 양 끝은 두 개의 평 행사변 형 4절 링크에 연결된다. 이로 인해 커넥팅 로드가 원 궤 도를 따라 병진 운동하며 주행을 위한 다리 끝의 궤적을 만든다.
![[Fig. 3]](/xml/26100/JKROS-14-4-270_F3.jpg "[Fig. 3]")
Schematic of the triangle shape connecting rod design. Each connecting rod links the three legs which make the tripod gait locomotion
![[Fig. 4]](/xml/26100/JKROS-14-4-270_F4.jpg "[Fig. 4]")
Schematic of the two parallelogram 4-bar linkage transmission in the robot. Two 4-bar linkage helps to prevent connecting rod from twisting
2.2 다리
다리의 움직임은 SCM 기반 rowing 메커니즘으로 구현했 다. SCM 기반 U-joint가 로봇 몸체(ground)와 커넥팅 로드에 각각 위치하여, 커넥팅 로드의 회전이 다리 끝으로 전달된다. [Fig. 5]를 보면 두 개의 SCM 기반 U-joint, 다리 끝 지점 사이의 길이의 비를 통해 다리 끝의 회전이 증폭된다.
![[Fig. 5]](/xml/26100/JKROS-14-4-270_F5.jpg "[Fig. 5]")
2D plane leg design. The leg can easily attach and detach with the robot
다리 강성의 변화에 따른 주행 속도를 측정하기 위해서는 동일한 로봇을 사용하되 다리의 강성만 바꿔 실험해야 한다. 다리의 강성을 쉽게 바꾸기 위해, 로봇 트랜스미션과 탈 부착 이 가능하도록 다리를 설계했다. 다리도 몸체와 마찬가지로 가볍고 유연한 PET (Polyethylene Terephthalate) 필름을 사용 하여 SCM 방법으로 제작되었다. PET 필름의 두께가 두꺼울 수록 강성이 커지므로, 필름의 두께를 바꿔 다리의 강성을 조 절할 수 있다. 제일 두꺼운 필름으로 제작된 다리보다 더 큰 강 성이 필요한 경우, 여러 장의 PET를 한번에 적층해 제작한다.
3. 제 작
3.1 SCM 제작 방법[23]
SCM 방법은 레이저 가공 공정과 라미네이팅 공정으로 이 루어져 있다. [Fig. 6B]에서 제작 방법을 그림으로 나타냈다. 레이저 가공으로 링크 역할을 하는 시트의 조인트와 외곽 기준 선을 자르며, 조인트 역할을 하는 시트는 외곽 기준선만 자른 다. 링크 역할을 하는 시트 두 장 사이에 조인트 역할을 하는 시 트를 넣고, 시트들 사이에 접착 필름을 넣어 열을 가하며 압착한 다. 라미네이팅된 시트를 다시 레이저 가공하여 로봇의 외형 부분 을 자른다. 조인트 라인에서 링크 역할 시트는 잘려 있고, 조인트 역할 시트는 잘리지 않고 연결되어 있기 때문에 쉽게 접힐 수 있 는 flexure linkage를 만들 수 있다. 로봇의 몸체는 링크 역할을 하 는 200 um 두께의 PET (Polyethylene terephthalate) 필름과 조인트 역할을 하는 유연한 천을 사용하여 제작했다. [Fig. 6A]에서 빨 간색 선은 로봇의 외형 선, 파란색 선은 조인트를 나타낸다.
![[Fig. 6]](/xml/26100/JKROS-14-4-270_F6.jpg "[Fig. 6]")
Process of the Smart Composite Microstructure (SCM) Method (A) 2D CAD design of the whole robot structure (B) fabrication method of the SCM (a) 1st laser machining to cut the flexure joints (b) put the fabric between two sheets with adhesive, press and heat the composite (c) 2nd laser machining to cut outline of the robot (d) get the whole robot structure
3.2 소형 6족 주행 로봇 프로토타입
[Fig. 7]은 SCM 방법으로 제작된 소형 6족 주행 로봇의 프 로토타입이다. 다리를 제외한 몸체의 크기는 길이 75 mm, 폭 40 mm, 높이 40 mm이며, 다리를 포함하여 길이 75 mm, 폭 90 mm, 높이 45 mm이다. 질량은 약 54.5 g (LiPo 배터리, 모터 드 라이버 등 실험에 필요한 장치 포함)이다. 로봇은 최대 70 cm/s (9.3 Body Length/s)의 속도로 주행 할 수 있다. 모터는 pololu 사의 10:1 Micro Metal Gearmotor HPCB 6V를 사용했고, 모터 와 크랭크 사이 베벨 기어의 비는 1.5 : 1 이고, 따라서 총 속도 감소 비는 15 : 1이다. 커넥팅 로드와 베벨 기어는 효과적인 동 력의 전달을 위해 3D 프린터(Cubicon Lux Full HD 3DS-200D) 를 이용해 단단한 파트로 제작되었다. 각 커넥팅 로드가 tripod gait를 이루는 세 개의 다리와 연결되어 있고, 두 평행사변 형 4 절 링크를 통해 커넥팅 로드의 뒤틀림을 막아준다.
![[Fig. 7]](/xml/26100/JKROS-14-4-270_F7.jpg "[Fig. 7]")
Milli-scale six-leg crawling robot prototype including battery and electronics. Total transmission gear ratio is 15:1
4. 실험 과정
4.1 다리 강성 측정 실험
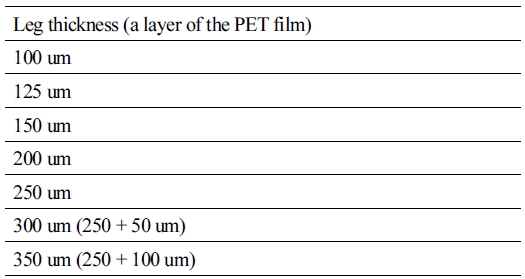
다리를 제작할 때 PET의 두께를 조절하여 다리의 강성을 조절할 수 있다. 다리의 두께와 강성 간 관계를 실험을 통해 확 인한다. 다리 강성 측정 실험은 [Fig. 8]같이 인장기와 로드셀 을 이용한다. 평평한 판으로 SCM 다리를 누르며 판에 부착된 로드셀을 통해 거리에 따른 반발력을 측정한다. 다리를 제작 할 때 사용하는 PET필름의 두께를 [Table 1]과 같이 총 7개의 단계로 조절했다. PET필름의 최대 두께인 250 um보다 더 두꺼 운 300 um, 350 um 두께의 다리를 제작하기 위해, 250 um 두께 의 PET에 50 um, 100 um의 PET를 추가로 적층하여 제작했다.
![[Fig. 8]](/xml/26100/JKROS-14-4-270_F8.jpg "[Fig. 8]")
Experimental setup of the leg .jpgfness measurement

Leg thickness variation in experiment
4.2 강성과 Payload에 따른 주행 속도 실험
소형 6족 주행 로봇의 Payload에 따라 최적의 주행 성능을 가지는 다리의 강성을 찾기 위해 주행 속도 실험을 진행했다. 모터의 속도를 고정하고, 각 payload에 따라 주행 속도를 측정 했다. 0 g부터 50 g까지 5 g 단위로 로봇의 payload를 조절하고, PD제어를 통해 모터의 회전수가 10 Hz로 유지되도록 했다.
주행 속도 실험은 [Fig. 9]와 같이 구성된다. 100 cm 길이의 구간을 등속도로 주행하는데 걸린 시간을 측정하여 로봇의 주행 속도를 계산한다. 각 payload당 5번 반복 주행하여 평균 속도를 얻는다. 등속 운동 구간에 들어가기 전에 20 cm 길이의 가속 운동 구간을 두어 로봇을 충분히 가속시킨다. 한 다리 강 성에 대해 모든 payload에 따른 주행 실험이 끝나면, 다른 강 성을 갖는 다리로 교체하여 다시 payload에 따른 실험을 진행 한다.
![[Fig. 9]](/xml/26100/JKROS-14-4-270_F9.jpg "[Fig. 9]")
Experimental setup of the driving speed measurement. Robot is accelerated during driving in 20 cm, and takes constant speed in 100 cm
5. 결과 및 고찰
5.1 다리 강성 측정 실험
다리의 두께에 따른 대한 반발력 측정 결과는 [Fig. 10]과 같 다. 다리의 두께가 증가함에 따라, 같은 변위에 대해 더 큰 반 발력이 작용하는 것을 확인할 수 있다. 다리의 강성은 변위에 따른 반발력의 변화량으로, 이를 이용하여 두께에 따른 강성 그래프를 [Fig. 11]과 같이 얻을 수 있다. 다리 두께가 증가함에 따라 다리의 강성이 증가한다. 본 실험의 결과를 통해 가볍고 유연한 시트를 사용한 SCM 방법에서, 시트의 두께를 조절하 거나 시트를 여러 장 적층해 다리의 강성을 조절할 수 있음을 알 수 있다.
![[Fig. 10]](/xml/26100/JKROS-14-4-270_F10.jpg "[Fig. 10]")
Reaction force and displacement for each thickness of the leg
![[Fig. 11]](/xml/26100/JKROS-14-4-270_F11.jpg "[Fig. 11]")
Relationship between leg .jpgfness and leg thickness
5.2 강성과 Payload에 따른 주행 속도 실험
[Fig. 12]는 소형 6족 주행 로봇의 실험 분석 영상의 일부이 다. 로봇이 tripod gait를 이용하여 안정적으로 주행하는 것을 볼 수 있다.
![[Fig. 12]](/xml/26100/JKROS-14-4-270_F12.jpg "[Fig. 12]")
Running of the six-leg crawling robot. Captured in the measurement video
로봇의 payload에 따른 주행 속도 측정 결과는 [Fig. 13]과 같다. 총 7개의 다리 두께에 대해 실험을 진행했다. 그래프에 서 로봇에 가해진 payload가 15 g 이상일 때, 다리 두께와 관계 없이 Payload가 증가함에 따라 로봇의 속도가 감소하는 것을 확인할 수 있다. 로봇의 주행 속도는 다리의 회전 수와 보폭의 곱이다. 다리의 회전 수는 10 Hz로 일정하므로, 보폭과 주행 속도는 비례한다. 따라서 로봇의 Payload가 15 g 이상 가해졌 을 때, 보폭이 감소하는 것을 알 수 있다. 이는 로봇의 무게가 일정 이상 증가함에 따라 다리가 더 많이 변형되어 지면을 효 과적으로 밀지 못하기 때문이다.
![[Fig. 13]](/xml/26100/JKROS-14-4-270_F13.jpg "[Fig. 13]")
Driving speed measurement experiment for payload graph. Thick blue line has the best performance among the several leg thickness
Payload가 0 g 일 때, 다리 두께가 증가함에 따라 로봇의 주 행 속도가 점점 증가하며, 200 um 의 다리 두께에서 가장 주행 속도가 빠르다. 다리 두께가 200 um 이상으로 증가하면 주행 속도가 감소한다. 따라서, 특정 payload에 대해 가장 효율적으 로 주행할 수 있는 최적의 다리 강성이 존재함을 알 수 있다. 다 리의 강성이 너무 낮으면 동일한 무게에 대해 다리의 변형이 상대적으로 커서 지면을 효과적으로 밀지 못한다. 다리의 강 성이 너무 높으면 로봇 질량 중심의 높이 변화가 상대적으로 커서 에너지가 분산되고 안정적으로 주행하지 못한다. 적절한 다리 강성을 가질 때, 다리의 변형을 통해 에너지를 저장하고 방출하여 안정적이고 빠르게 주행할 수 있다.
다리 두께가 200 um 이하일 때에는, payload가 0 g 일 때 주 행 속도가 가장 빠르다. 하지만 다리 두께가 250 um 이상일 때 에는, payload가 0 g보다 큰 5 ~ 10 g 에서 주행 속도가 가장 빠 른 것을 확인 할 수 있다. [Fig. 14]는 다리 두께가 250 um 이상 일 때의 로봇의 주행 속도 그래프이다. payload가 0 g에서 10 g 까지 증가할 때, 로봇의 주행 속도가 오히려 증가하는 것을 볼 수 있다. 따라서 로봇의 무게와 주행 속도가 항상 반비례 하는 것이 아니라 가장 주행 속도가 빠른 적절한 무게가 있고, 다리 강성에 비례하여 그 무게가 커진다고 생각된다. 다리 두께가 200 um 이하일 때에도 적절한 무게가 있는지 확인하기 위해서 는 로봇의 무게를 더 줄여가며 실험을 해야 한다. 하지만 실험 에 사용된 로봇의 자체 무게로 인해, 두께 200 um 이하의 강성 구간에서는 주행 속도가 가장 빠른 적절한 무게가 있는지 확 인하지 못했다.
![[Fig. 14]](/xml/26100/JKROS-14-4-270_F14.jpg "[Fig. 14]")
Driving speed measurement experiment for payload graph especially higher thickness than 200 um. Those line have the peak point on the graph
로봇이 동일한 payload로 주행할 때, 다리의 두께가 로봇의 주행 속도에 미치는 영향을 살펴본다. [Fig. 15]는 로봇이 각각 0 g, 50 g의 payload를 싣고 주행할 때 다리 두께에 따른 주행 속도의 변화를 나타낸 그래프이다. payload가 0 g일 때에는 다 리 두께 변화에 대해 주행 속도가 큰 폭으로 변하지만, payload 가 50 g일 때에는 다리 두께 변화에 대해 주행 속도 변화가 거 의 없다. 로봇의payload가 증가함에 따라, 다리 두께가 주행 속 도에 미치는 영향이 작아짐을 확인할 수 있다. 소형 6족 주행 로봇에서 로봇이 가벼울수록 다리의 강성이 주행 속도에 더 큰 영향을 주는 것을 알 수 있다.
![[Fig. 15]](/xml/26100/JKROS-14-4-270_F15.jpg "[Fig. 15]")
Driving speed measurement experiment for leg thickness graph in payload 0 g and 50 g
6. 결 론
본 논문에서는 소형 6족 주행 로봇에서 다양한 payload에 따라 주행 성능을 높일 수 있는 다리의 강성을 실험을 통해 찾 고자 했다. 주행 성능을 평가하기 위해 신뢰성이 있고 견고한 소형 6족 주행 로봇 플랫폼을 제작했다. 모터의 회전 운동을 다리로 효과적으로 전달하여 tripod gait로 주행하는 트랜스미 션을 설계했고, SCM 방법을 사용하여 가볍고 유연한 로봇을 제작했다. 제작된 로봇으로 다리 강성과 로봇의 질량에 따른 주행 속도를 측정해, payload에 따라 다리 강성이 로봇의 주행 속도에 미치는 영향을 확인했다.
실험 결과를 통해, payload가 일정 이상으로 커지면 로봇 다 리 강성에 관계없이 주행 속도가 감소하는 것을 확인할 수 있 었다. 또한 payload가 커짐에 따라, 다리 강성이 주행 속도에 미치는 영향이 줄어들었다. Payload가 0 g 일 때 200 um의 다 리 두께에서 로봇의 주행 속도가 가장 빨랐다. 250 um 이상의 다리 두께에서는, payload가 0 g 에서 10 g 까지 증가할 때 로봇 의 주행 속도가 오히려 증가하는 것을 볼 수 있었다.
실험에 사용된 로봇의 자체 무게로 인해, payload가 감소할 때 최적의 주행 성능을 갖는 다리 강성이 감소하는지 확인할 수 없었다. 따라서 로봇의 무게를 줄여 더 다양한 무게에서 실 험을 진행해야 한다. SCM 방법으로 가볍고 유연한 재료를 사 용하여 로봇을 제작해, 로봇 다리 뿐만 아니라 몸체의 강성도 낮다.로봇 몸체의 강성도 주행 성능에 영향을 주기 때문에 추 가 연구를 통해 다리의 강성과 몸체의 강성을 둘 다 고려.하여 주행 성능에 어떤 영향을 미치는지 확인할 수 있을 것이다.
본 연구에서 소형 6족 주행 로봇의 다양한 payload에 대해 주행 성능을 높이는 강성이 있음을 확인함으로써, 소형 6족 주 행 로봇이 다양한 임무를 수행하기 위해 여러 가지 payload를 짊어질 때 다리 강성 변화를 통해 임무 수행 속도와 효율을 높 이는데 도움을 줄 수 있을 것이다.
Acknowledgments
This research was supported by a grant to “Development of bio-inspired jump-crawler with high payload capacity” by LIG NEX1.
References
-
U. Saranli, M. Buehler, and D. E. Koditschek, “Rhex: A simple and highly mobile hexapod robot,” International Journal of Robotics Research, vol. 20, no. 7, pp. 616-631, Jul., 2001.
[https://doi.org/10.1177/02783640122067570]

-
P. Birkmeyer, K. Peterson, and R. S. Fearing, “DASH: A dynamic 16g hexapedal robot,” 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, USA, pp. 2683-2689, 2009.
[https://doi.org/10.1109/IROS.2009.5354561]
-
A. T. Baisch, P. S. Sreetharan, and R. J. Wood, “Biologicallyinspired locomotion of a 2g hexapod robot,” 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, pp. 5360-5365, 2010.
[https://doi.org/10.1109/IROS.2010.5651789]
-
A. T. Baisch, C. Heimlich, M. Karpelson, and R. J. Wood, “HAMR3: An autonomous 1.7g ambulatory robot,” 2011 IEEE/ RSJ International Conference on Intelligent Robots and Systems, San Francisco, USA, pp. 5073-5079, 2011.
[https://doi.org/10.1109/IROS.2011.6095063]
-
A. M. Hoover, E. Steltz, and R. S. Fearing, “RoACH: An autonomous 2.4g crawling hexapod robot,” 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, pp. 26-33, 2008.
[https://doi.org/10.1109/IROS.2008.4651149]
-
A. M. Hoover, S. Burden, X.-Y. Fu, S. S. Sastry, and R. S. Fearing, “Bio-inspired design and dynamic maneuverability of a minimally actuated six-legged robot,” 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, pp. 869-876, 2010.
[https://doi.org/10.1109/BIOROB.2010.5626034]
- J. M. Morrey, B. Lambrecht, A. D. Horchler, R. E. Ritzmann, and R. D. Quinn, “Highly mobile and robust small quadruped robot,” 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, USA, pp. 82-87, 2003.
-
T.-Y. Kim, C. Kim, S.-H. Kim, and G.-P. Jung, “MutBug: A Lightweight and Compact Crawling Robot That Can Run on Both Sides,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 1409-1415, Apr., 2019.
[https://doi.org/10.1109/LRA.2019.2895896]
-
S. Sponberg and R. J. Full, “Neuromechanical response of musculoskeletal structures in cockroaches during rapid running on rough terrain,” Journal of Experimental Biology, vol. 211, no. 3, pp. 433-446, 2008.
[https://doi.org/10.1242/jeb.012385]
-
J. F. V. Vincent and U. G. K. Wegst, “Design and mechanical properties of insect cuticle,” Arthropod Structure & Development, vol. 33, no. 3, pp. 187-199, Jul., 2004.
[https://doi.org/10.1016/j.asd.2004.05.006]
- R. J. Full and M. S. Tu, “Mechanics of a rapid running insect: two-, four-and six-legged locomotion,” Journal of Experimental Biology, vol. 156, pp. 215-231, 1991.
- F. Delcomyn, “The locomotion of the cockroach periplaneta americana,” Journal of Experimental Biology, vol. 54, pp. 443-452, 1971.
-
K. Jayaram and R. J. Full, “Cockroaches traverse crevices, crawl rapidly in confined spaces, and inspire a soft, legged robot,” National Academy of Sciences, vol. 113, no. 8, pp. E950-E957, Feb., 2016.
[https://doi.org/10.1073/pnas.1514591113]
-
J. Schmitt and P. Holmes, “Mechanical models for insect locomotion: dynamics and stability in the horizontal plane –II. Application,” Biological Cybernetics, vol. 83, no. 6, pp. 517-527, Nov., 2000.
[https://doi.org/10.1007/s004220000180]
- C. T. Farley, J. Glasheen, and T. A. McMahon, “Running springs: speed and animal size,” Journal of Experimental Biology, vol. 185, pp. 71-86, Dec., 1993.
-
J. Luo, S. Wang, Y. Zhao, and Y. Fu, “Variable .jpgfness control of series elastic actuated biped locomotion,” Intelligent Service Robotics, vol. 11, no. 3, pp. 225-235, Jul., 2018.
[https://doi.org/10.1007/s11370-018-0248-y]
-
D. E. Koditschek, R. J. Full, and M. Buehler, “Mechanical aspects of legged locomotion control,” Arthropod Structure & Development, vol. 33, no. 3, pp. 251-272, Jul., 2004.
[https://doi.org/10.1016/j.asd.2004.06.003]
-
P. Holmes, R. J. Full, D. Koditschek, and J. Guckenheimer, “The dynamics of legged locmomotion: Models, analyses, and challenges,” SIAM Review, vol. 48, no. 2, pp. 207-304, 2006.
[https://doi.org/10.1137/S0036144504445133]
-
J. G. Cham, S. A. Bailey, J. E. Clark, R. J. Full, and M. R. Cutkosky, “Fast and robust: Hexapedal robots via shape deposition manufacturing,” The International Journal of Robotics Research, vol. 21, no. 10-11, pp. 869-882, 2002
[https://doi.org/10.1177/0278364902021010837]
-
S. Kim, J. E. Clark, and M. R. Cutkosky, “iSprawl: Design and Tuning for High-speed Autonomous Open-loop Running,” The International Journal of Robotics Research, vol. 25, no. 9, pp. 903-912, Sep. 2006.
[https://doi.org/10.1177/0278364906069150]
-
D. Yun and R. S. Fearing, “VLR: Cockroach millirobot with load decoupling structure,” 2015 IEEE International Conference on Advanced Intelligent Mechatronics, Busan, South Korea, pp. 127-132, 2015.
[https://doi.org/10.1109/AIM.2015.7222520]
-
D. Yun and R. S. Fearing, “Cockroach Milli-Robot With Improved Load Capacity,” Journal of Mechanisms Robotics, vol. 11, no. 3, Jun., 2019.
[https://doi.org/10.1115/1.4042626]
-
R. J. Wood, S. Avadhanula, R. Sahai, E. Steltz, and R. S. Fearing, “Microrobot design using fiber reinforced composites,”Journal of Mechanical Design, vol. 130, no. 5, pp. 052304, 2008.
[https://doi.org/10.1115/1.2885509]
2017 서울대학교 기계항공공학부(공학사)
2018~현재 서울대학교 기계항공공학부 석박사통합과정
관심분야: 생체 모사 로봇 등

2014 한국과학기술원 기계공학과(공학사)
2014~현재 서울대학교 기계항공공학부 석박사통합과정
관심분야: 생체 모사 로봇 등
2016 서울대학교 기계항공공학부(공학사)
2016~현재 서울대학교 기계항공공학부 석박사통합과정
관심분야: 생체 모사 로봇 등

2017 서울대학교 물리교육과(이학사)
2019 서울대학교 기계항공공학부(공학석사)
2019~현재 서울대학교 기계항공공학부 박사과정
관심분야: 생체 모사 로봇 등

2004 경희대학교 기계공학과(공학석사)
2009 JAIST 로봇공학과(공학박사)
2009~현재 LIG넥스원 미래기술연구소 팀장
2012 마르퀴즈 후즈후 세계인명사전 등재
2018 올해의 10대 기계기술 선정(감시정찰 무인수상정)
관심분야: Unmanned & Robotic systems, Insect inspired robot, Behavior analysis

2011 한양대학교 전자시스템공학과(공학사)
2013 한양대학교 전자시스템공학과(공학석사)
2013~현재 LIG넥스원 미래기술연구소 선임 연구원
관심분야: Moving mechanism, Image enhancement, Object detection & tracking

1998 서울대학교 기계항공공학부(공학사)
2000 서울대학교 기계항공공학부(공학석사)
2007 Mechanical Engineering, MIT(공학박사)
2008~현재 서울대학교 기계항공공학부 교수
관심분야: 생체 모사 로봇, 소프트 로봇, 의료용 로봇, 웨어러블 로봇 등