어깨의 움직임을 중심으로 한 상지재활로봇 NREX의 착용감 개선

© Korea Robotics Society. All rights reserved.
Abstract
NREX, an upper limb exoskeleton robot, was developed at the National Rehabilitation Center to assist in the upper limb movements of subjects with weak muscular strength and control ability of the upper limbs, such as those with hemiplegia. For the free movement of the shoulder of the existing NREX, three passive joints were added, which improved its wearability. For the flexion/extension movement and internal/external rotation movement of the shoulder of the robot, the ball lock pin is used to fix or rotate the passive joint. The force and torque between a human and a robot were measured and analyzed in a reaching movement for four targets using a six-axis force/torque sensor for 20 able-bodied subjects. The addition of two passive joints to allow the user to rotate the shoulder can confirm that the average force of the upper limb must be 31.6% less and the torque must be 48.9% less to perform the movement related to the axis of rotation.
Keywords:
Exoskeleton Robot, Misalignment, Additional Joint, Reaching, Rehabilitation1. 서 론
인구 고령화에 따라 뇌졸중 장애인도 매년 지속적으로 증가 하면서 사회적인 문제가 되고 있다. 2012년부터 2016년까지 뇌경색 환자는 연평균 1.8%, 뇌출혈 환자는 연평균 3.3% 증가 했고, 뇌경색 환자의 진료비는 연평균 9.9%, 뇌출혈 환자의 진 료비는 연평균 11.2% 증가했으며 그 중 대부분을 입원 진료비 가 차지하였다[1]. 뇌졸중은 운동부족, 흡연, 잘못된 식습관 등 그 원인이 다양하며 뇌졸중 예방 및 발병을 없애기 위한 노력 이 꾸준히 진행되고 있다. 하지만 뇌졸중으로 인한 장애인은 지속적으로 증가하고 있으며 관련된 사회적인 비용도 계속 증가하고 있다.
뇌졸중으로 인해 사지의 한쪽이 마비가 된 편마비 장애인 들은 그 기능을 회복 및 유지하기 위해 병원뿐만 아니라 가정 에서도 운동을 할 필요가 있다[2]. 그러나 지속적인 운동을 위 해 소요되는 재활운동기기 구매 등 관련비용을 부담하기에는 어려움이 있다. 또한, 병원에서 가정으로 복귀한 후에는 가족 이나 타인이 불편한 부분을 도와주거나, 마비가 되지 않은 건 측 팔을 위주로 사용하여 일상생활이 가능하므로 스스로 마비 된 환측 팔을 사용하지 않는 경우가 많다[3].
국립재활원에서는 편마비로 인한 장애인 및 여러 장애 등 으로 상지의 근력이 약한 사람을 위하여 일상생활과 관련된 동작이나 팔 근육의 운동을 도와줄 수 있는 상지 외골격 로봇 인 NREX (NRC Robotic Exoskeleton)를 개발하였다[4]([Fig. 1]).
![[Fig. 1]](/xml/26106/JKROS-14-4-318_F1.jpg "[Fig. 1]")
NREX
재활로봇 중 상지로봇은 크게 외골격 로봇(Exoskeleton robot) 과 말단장치 로봇(End effector-based robot)으로 나누어진다[5]. 외골격 로봇은 로봇과 사용자의 각 관절 축을 유사하게 만들 어 각 관절의 움직임을 제어하는 것이 가능하여 특정 근육을 훈련시킬 수 있지만, 사용자에 맞춰 링크 길이를 변경해야 하 고 제어해야 하는 관절이 많아질수록 전체적인 로봇의 크기가 커지고 제어가 어려워지는 단점이 있다. 반면에 말단장치 로 봇은 사용자의 신체 사이즈와 크게 상관없이 말단장치와 사용 자를 연결하기만 하면 되기 때문에 로봇 착용이 간단하고 전 체적인 시스템의 크기도 작다. 그러나 특정 관절의 단일 움직 임을 제어하기에 어려움이 있다.
외골격 로봇의 기구 설계에서는 관절 이동 범위, 사용자 안 전, 편안한 착용감, 저관성 등이 특별히 고려되어야 한다[6]. 착 용감이란 인체와 착용하는 물체간의 상호작용으로 정의되고 동적 착용감은 움직이는 인체를 포함하여 그 정의를 확장한다 [7]. 어깨를 비롯한 상지를 움직이는 동안 사람과 로봇의 관절 축이 일치하지 않으면 사용자에게 통증 및 관절 손상을 일으 킬 위험이 있다[8]. 어깨에는 많은 관절과 근육들이 서로 복잡 하게 얽혀서 복합적으로 움직이기 때문에[9] 현실적으로 이런 몸통과 어깨의 복합적인 생체역학적 움직임을 전부 고려해서 상지외골격 로봇을 설계 및 제작하는 데에는 많은 어려움이 있다. 위와 같은 문제들을 해결하기 위해 최근에는 기존의 어 깨 관절 재활을 위해 견고하고 딱딱한 링크 및 조인트 구조 대 신 상체에 쉽게 착용할 수 있는 케이블 기반의 부드러운 보조 기, 직렬탄성구동기 등을 이용하여 사용자 어깨의 움직임에 따라 반응해 작동 중 기구와의 오정렬과 해부학적 변형에 적 응 하여 환자를 보호하는 형태의 시스템[10]이 개발되고 있다.
기존의 NREX는 어깨의 굴곡/신전(Flexion/Extension)과 회전 (Rotation)에 대한 움직임이 자연스럽게 추종되지 않아 사용자가 로 봇을 착용하고 상지 운동할 때 동작이 자연스럽지 못하거나 로봇과 상지의 연결 부위에 불편함이나 통증이 발생될 수 있다([Fig. 2]).
![[Fig. 2]](/xml/26106/JKROS-14-4-318_F2.jpg "[Fig. 2]")
Limited Shoulder Range of Motion
이런 문제점을 해결하기 위해 간단하면서도 저렴한 부품 을 추가하여 어깨의 굴곡/신전, 회전이 가능한 기구를 제안 하였다[11]. NREX에서 집중하고 있는 일상생활과 관련된 동 작에 대해 힘/토크 센서를 이용하여 로봇의 착용성을 살펴 보았다.
2장에서는 NREX를 이용하여 상지를 운동할 때 사용자 어 깨의 움직임이 자유롭도록 NREX 기구를 개선한 내용에 대해 기술하였다. 3장에서는 NREX 기구 개선 전/후의 변화를 알아 보기 위해 실험을 하였고 그 결과에 대해 기술하였다. 4장에서 는 NREX의 착용감 개선에 대한 내용을 요약하고 향후 사용 방향에 대해 기술하였다.
2. NREX 기구 개선
NREX는 외골격 로봇과 말단장치 로봇의 특징을 적절히 혼 합하여 최대한 간단하면서도 필요한 기능들은 추가하여 제작 하였다. 손(Hand)에서 상완(Upper arm)까지는 벨크로 스트랩 을 이용해 사용자의 팔을 로봇에 착용하여 기구에 고정하는 외골격 로봇이다. 나머지 어깨의 움직임은 사용자와 로봇 기 구의 회전축을 일치시킬 필요가 없는 말단장치 로봇(상하로 팔을 움직일 수 있도록 하는 4절링크와 수평면에서 전후 좌우 로 움직일 수 있는 스칼라 로봇)의 형태를 조합하였다([Fig. 3]).
![[Fig. 3]](/xml/26106/JKROS-14-4-318_F3.jpg "[Fig. 3]")
NREX Before Improvement
1장에서 살펴본 NREX의 문제점을 개선하기 위하여 다음 의 총 3개 수동관절을 추가하였다. [Fig. 4]는 개선 전/후 NREX 의 모습을 간단하게 도식화 한 그림이다.
![[Fig. 4]](/xml/26106/JKROS-14-4-318_F4.jpg "[Fig. 4]")
NREX Schematization, (a) Original Structure, (b) Improved Structure with Additional Joints
NREX는 가볍고 저렴하며 사용자의 자연스러운 움직임이 가 능하도록 전기 모터를 적게 사용하고 단순하게 설계하여 구현하 였다. 기본적으로는 모터가 없는 수동관절을 사용하고 꼭 필요 한 관절에만 모터를 추가하였다. 모터로 구동되는 관절이 많아 질수록 기구의 복잡도가 높아지고 제어에 어려움이 커지기 때문 에 실용성은 감소될 수 있다. 수동관절은 사용자의 자세에 대해 로봇의 구동하는 축과 사용자의 관절 사이의 정렬에 사용된다.
NREX는 사용자가 일상생활 훈련을 하는데 도움을 주기 위 한 로봇으로, 주로 사용자가 스스로 상지를 움직이면서 상황 에 따라 부족한 움직임을 모터를 통한 능동관절을 제어하여 보조가 가능하도록 한다. 예를 들어, 스카라 구조의 경우 정확 한 위치 제어가 필요하지 않고 사용자의 상지 움직임에 따라 움직이는 부분이므로 별도의 제어를 하지 않는다.
개선된 NREX는 [Fig. 5]와 같이 개선전보다 총 3개의 수동 관절을 추가하였고 양팔에 모두 대응 가능하도록 제작하였다. 먼저 로봇 거치대 부근의 스카라와 유사한 구조에 1개의 추가 수동관절 #1 (Additional Joint for Shoulder Abduction/ Adduction, AJ_SAA)을 추가하여 개선 전에는 수평면에서 회전 운동만 가 능했던 움직임을 직선 운동이 가능하게 하여 더 부드러운 어 깨 움직임이 가능해졌다.
![[Fig. 5]](/xml/26106/JKROS-14-4-318_F5.jpg "[Fig. 5]")
NREX After Improvement
추가로 [Fig. 6]과 같이 항중력모듈의 기구에 어깨 굴곡/신전 에 대한 추가수동관절 #2 (Additional Joint for Shoulder Flexion/ Extension, AJ_SFE)와 어깨 내/외회전에 대한 추가수동관절 #3 (Additional Joint for Shoulder Internal/External Rotation, AJ_SIER) 이 추가되었고, 볼잠금핀을 사용하여 로봇의 어깨 굴곡/신전(Flexion/ Extension), 내/외회전(Internal/External Rotation) 움직임을 고정 시키거나 회전이 가능하게 하였다.
![[Fig. 6]](/xml/26106/JKROS-14-4-318_F6.jpg "[Fig. 6]")
Additional Joint for Shoulder Flexion/Extension (AJ_SFE) and Additional Joint for Shoulder Internal/External Rotation (AJ_SIER)
추가수동관절 #2, #3에는 고무밴드를 이용하여 중력 반대방 향으로 지속적으로 당겨주는 구조를 채택하였다([Fig. 6]). 기구 의 회전만 가능하게 하면 로봇 착용시 기구 및 사용자 팔의 무 게로 인한 토크가 발생하여 로봇이 아래로 회전을 하게 된다. 따 라서 로봇이 아래로 처지지 않게 하기 위해 회전축에 중력에 의 한 토크 반대 방향으로의 토크를 발생시키는 장치가 필요하다. NREX 개발의 목적이 사용자에게 저렴하면서도 꼭 필요한 기능 을 가진 상지재활로봇을 공급하고자 하는 것이기 때문에, 교체 가 편리하고 제작단가를 줄이기 위해서는 사용성이 뛰어난 상용 제품보다는 간단하고 실용성이 있는 고무 밴드를 사용하였다.
고무 밴드 대신 보조기 등에 사용하는 부품으로 스프링을 이 용하여 특정 방향으로 지속적인 토크를 발생하는 일체화된 부 품이 있다. 부품은 토크의 크기 별로 가격이 달라지며, 로봇의 무 게와 성인의 상지 무게를 지탱할만한 크기의 부품은 가격이 개 당 50만 원 이상이다. 두 개의 축에 대한 토크를 발생시키기 위해 서는 최소 100만 원 이상이므로 가격의 부담이 크고 최대 토크가 만족할 만한 크기가 아니다. 저렴한 고무 밴드와 가성비로 비교 해 보았을 때 큰 이점이 없다. 신뢰성 면에서 시간이 지나면 고무 밴드의 텐션이 감소하여 영향을 줄 수 있다. 주기적으로 고무 밴 드의 텐션이 감소했을 때 고무 밴드를 추가 또는 교체 하면 된다.
기계적인 움직임의 한계를 설정하는 것은 사용자의 안전성 확보를 위해 적절한 접근 방법인데 사용자 안전을 위하여 NREX에 추가한 수동관절에는 ROM을 기계적으로 제한할 수 있는 구조[12]를 적용하였다. [Fig. 7]은 어깨의 굴곡/신전(Flexion/ Extension), 내/외회전(Internal/External Rotation)의 움직이는 범위를 제한할 수 있는 구조이다. 굴곡/신전 회전축에 연결되 는 두 부품에서 a와 a'의 길이 조절을 통해 기계적인 움직임 한 계를 설정하여 팔을 앞으로 쭉 뻗은 상태에서 어깨의 굴곡되 는 각도 범위를 조절할 수 있다. b와 b'의 길이 조절을 통해 기계적인 움직임 한계를 설정하여 팔을 앞으로 쭉 뻗은 상 태에서 어깨의 신전 되는 각도 범위를 조절할 수 있다. 내/외 회전 회전축에 연결되는 두 부품에서 c'의 길이 조절을 통해 기계적인 움직임 한계를 설정하여 팔을 앞으로 쭉 뻗은 상 태에서 어깨의 내/외회전 되는 각도 범위를 조절할 수 있다. 또한 회전축을 중심으로 위아래의 길이(c')가 대칭이 되어 야 오른팔, 왼팔 변환을 해도 양팔의 내/외회전 되는 각도 범 위가 같아진다.
![[Fig. 7]](/xml/26106/JKROS-14-4-318_F7.jpg "[Fig. 7]")
Shoulder Rotation Angle ROM Restricted Parts
3. 힘/토크 측정
3.1. 실험 방법
개선한 NREX를 이용해서 개선 전후(어깨 관절의 회전 유 무) 사용자가 같은 동작을 했을 때 얼마나 쉽게 동작을 수행할 수 있는지 비교하기 위하여 간단한 실험을 진행하였다. 외골격 로봇의 효과를 평가하기 위해서 표면 근전도 신호[13]나 힘/토크 센서 신호를 이용하는 등의 방법들이 있는데, 본 논문에서는 힘 /토크 센서 신호를 이용하는 방법을 선택하였고 그 센서 신호의 크기가 작을 수록 쉽게 동작을 수행한 것으로 볼 수 있다.
사용자는 NREX를 착용한 후 팔을 편하게 내리고 있는 시 작 위치에서 출발하여 3차원 공간상의 공 형태의 목표물을 손 잡이를 잡은 손으로 도달하고 다시 시작 위치로 돌아온다. 실 험은 목표물의 높이에 따른 차이와 뻗는 팔을 기준으로 같은 쪽 목표물과 반대 쪽 목표물의 차이를 살펴보기 위하여 눈높 이 위치에 반대 쪽 목표물 T1과 같은 쪽 목표물 T3, 배꼽높이 의 반대 쪽 목표물 T4와 같은 쪽 목표물 T6에 대해 뻗기 작업 을 수행하였다([Fig. 8]). 상하좌우로 사용자의 움직임 크기가 상대적으로 큰 4개의 목표물만을 대상으로 실험을 진행하였고, 각각 추가한 어깨 관절의 회전이 불가능하도록 잠근 상태(개선 전) 10회, 어깨 관절의 회전이 가능하도록 한 경우(개선 후) 10 회씩 뻗기 작업을 수행하였다.
![[Fig. 8]](/xml/26106/JKROS-14-4-318_F8.jpg "[Fig. 8]")
NREX Reaching Test
실험에서는 볼잠금핀([Fig. 6])을 사용하여 개선하면서 추 가한 3개의 관절([Fig. 4]) 중 2개인 로봇의 어깨 굴곡/신전 (Flexion/Extension), 내/외회전(Internal/External Rotation) 움 직임을 고정시키거나 회전이 가능하게 하였고, 6축 힘/토크 센 서로 각 축에 대한 힘과 토크를 측정하였다. 6축 힘/토크 센서는 ATI사의 mini45가 사용되었으며, 사용자의 상완(Upper arm)을 로봇 팔에 고정시키는 부위에 1개를 부착하여 사용자의 팔과 로 봇 사이에 발생하는 전체적인 힘과 토크를 측정하였다([Fig. 9]).
![[Fig. 9]](/xml/26106/JKROS-14-4-318_F9.jpg "[Fig. 9]")
Force & Torque Measurement of NREX
3.2. 실험 결과
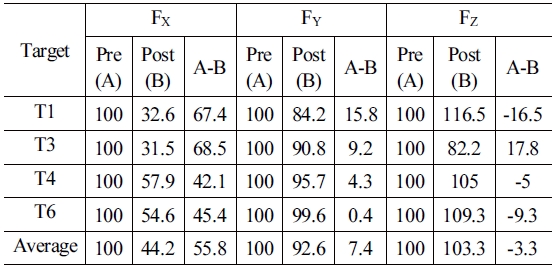
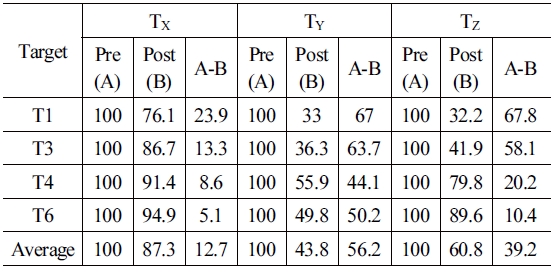
비장애인 20명을 대상으로 실험을 진행하였고, 4개의 목표 물에 대해 각 축 별로 힘과 토크의 변화, 각 목표물별 전체 힘의 합, 토크의 합 변화를 분석해 보았다. 개선 전과 개선 후의 경 우 뻗기 시간이 다르기 때문에 동일한 시간에 대해 비교하기 위하여 모든 힘과 토크 값은 시간으로 나누어 시간에 대해 정 규화(Normalization)된 평균값으로 비교를 하였다. 데이터의 크기는 절대값으로 계산하였다. 통계 프로그램은 SPSS를 사용 하였으며 대응표본 T검정으로 유의확률은 0.05를 적용하였다.
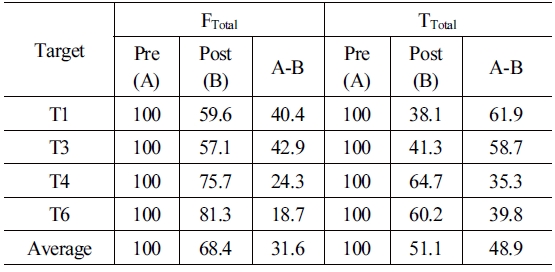
실험 결과는 다음과 같다. [Table 1]~[Table 3]에는 개선 전/ 후 힘과 토크 값을 비교하여 100분율로 환산한 값으로 표현했 다. Total 값은 X, Y, Z 3개 축의 3차원 힘 및 토크의 합을 계산 한 값이다. 각 축에 대한 목표물에 따른 힘의 변화를 살펴보면 힘은 X축에 대해서 55.8%([Table 1])로 가장 큰 감소를 보였고 세 축의 합의 평균 힘은 31.6%([Table 3]) 감소하였다. 토크는 Y축에 대해서 56.2%([Table 2])로 가장 큰 감소를 보였고 세 축 의 합의 평균 토크는 48.9%([Table 3]) 감소하였다.

Percentage of the Average Force with Respect to Axes
Percentage of the Average Torque with Respect to Axes
Percentage of the Average Total Force/Torque with Respect to Targets
[Fig. 10]은 특정 피험자가 목표물 T3에 대해 뻗기 작업을 수행한 후 개선 전후에 각 축에 대해 힘과 토크의 값을 비교 한 그래프이다. 피험자 및 목표물에 따라 조금씩 차이는 있었 지만 대부분의 경우 기구 개선 전 뻗기 작업을 수행한 시간보 다 기구 개선 후 뻗기 작업을 수행한 시간이 더 짧았다. 또한 힘과 토크의 크기를 살펴보았을 때 대부분의 경우에서 기구 개선 전이 기구 개선 후보다 그 크기가 더 크다는 것을 확인 할 수 있다.
![[Fig. 10]](/xml/26106/JKROS-14-4-318_F10.jpg "[Fig. 10]")
Force/Torque with Respect to Times for Target, T3, (a) Force in X axis, (b) Torque in X axis, (c) Force in Y axis, (d) Torque in Y axis, (e) Force in Z axis, (f) Torque in Z axis, (g) Total force, (h) Total torque, FTotal=Fxi2+Fyi2+Fzi2, TTotal=Txi2+Tyi2+Tzi2, Time = Operating Time, w/o AJ: without Additional Joints, w/ AJ: with Additional Joints
[Fig. 11]은 4개의 목표물에 대해 각 축에 따른 힘과 토크의 변화를 그래프로 나타내었다. 목표물 T1, T3, T6에서 동일하 게 Z축의 힘 값을 제외한 모든 값에서 통계적으로 유의미한 감 소를 보였다. 이 결과는 기구 개선 전후를 비교했을 때 Z축 방 향으로 움직이는 X축의 회전(Abduction /Adduction)이 되지 않기 때문이라고 할 수 있다. 목표물 T4의 경우 Y, Z축의 힘과 X축 토크의 값을 제외하고는 모든 값에서 통계적으로 유의미 한 감소를 보였다. 이 3가지의 값들도 모두 X축의 회전과 관련 된 값들로 기구적으로 X축의 회전이 되지 않았기 때문에 나타 난 결과로 볼 수 있다.
![[Fig. 11]](/xml/26106/JKROS-14-4-318_F11.jpg "[Fig. 11]")
Change of the Average Force/Torque with Respect to Targets, (a) Average Force with Respect to T1, (b) Average Torque with Respect to T1, (c) Average Force with Respect to T3, (d) Average Torque with Respect to T3, (e) Average Force with Respect to T4, (f) Average Torque with Respect to T4, (g) Average Force with Respect to T6, (h) Average Torque with Respect to T6. X=Σ|Fxi| or Σ|Txi|,Y=Σ|Fyi| or Σ|Tyi|,Z=Σ|Fzi| or Σ|Tzi|, Total = ΣFxi2+Fyi2+Fzi2 or ΣTxi2+Tyi2+Tzi2, Time = Operating Time, *: p < 0.05 w/o AJ: without Additional Joints, w/ AJ: with Additional Joints
목표물에 따른 전체 피험자의 힘/토크 센서 각 축 힘의 합의 평균을 비교해 보았을 때는 모든 목표물의 힘과 토크에 대해 통계적으로 유의한 차이가 있어서 NREX를 이용한 상지의 움 직임 시 개선 전보다 개선 후에 사용자의 상지에 힘이 덜 든다 고 할 수 있다. 목표물의 높낮이에 대한 비교를 위해 [Fig. 12] 를 살펴보면 눈높이의 목표물 T1, T3이 배꼽높이의 목표물 T4, T6에 비해 평균 힘 및 토크 값이 개선 전에 비해 개선 후가 많 이 작아진 것을 확인할 수 있다. 이것은 Z축의 회전(Flexion/ Extension)이 개선 전에는 불가능했지만 개선 후에는 가능하 기 때문에 상지를 들고 위아래로 움직였을 때(목표물 T1, T3) 가 앞뒤로 움직였을 때(목표물 T4, T6) 보다 그 효과가 더 크다 는 것을 알 수 있다. 또한 같은 높이에서 움직이는 팔을 기준으 로 같은 쪽과 반대 쪽의 목표물에 대하여 비교했을 때(목표물 T3/T1, T6/T4)는 개선 전후 평균 힘 및 토크 값의 차이가 그렇 게 크지 않음을 알 수 있었다. 이 결과는 개선 전과 후 모두 X축 의 회전(Abduction/Adduction)이 되지 않기 때문에 같은 높이 에서 좌우로만 움직임에 있어서는 그 결과에 큰 차이가 없다 고 볼 수 있다.
![[Fig. 12]](/xml/26106/JKROS-14-4-318_F12.jpg "[Fig. 12]")
Change of the Average Force/Torque Torque with Respect to All Targets, (a) Average Force with Respect to All Targets, (b) Average Torque with Respect to All Targets. Force = ΣFxi2+Fyi2+Fzi2, Torque = ΣTxi2+Tyi2+Tzi2, Time = Operating Time, *: p < 0.05 w/o AJ: without Additional Joints, w/ AJ: with Additional Joints
일상생활과 관련된 뻗기 작업에 대하여 로봇과 사람과의 접속 부위에 힘과 토크를 측정하였다. 이 때 수동관절을 추가 하면 로봇과 사람 사이에 상호작용으로 인하여 발생하는 힘과 토크가 감소하였다. 로봇팔이 사용자에게 자연스러운 움직임 을 제공하는 경우 사용자의 입장에서는 걸리적거리는 느낌이 감소하고 해당 센서에서는 힘과 토크가 줄어든다. 이러한 이 유로 힘과 토크의 감소가 착용감의 향상으로 이어질 수 있다. 기구 개선 및 힘/토크 측정 실험의 결과로 미루어 볼 때 수동 회전 관절과 같은 간단한 기구를 추가한 것만으로 외골격 로 봇의 크기 및 사용시 오정렬(Misalignment)로 인한 사용자의 통증 및 관절 손상 문제를 해결하는 하나의 방법으로 제시해 볼 수 있을 것으로 생각한다.
4. 결 론
본 고에서는 국립재활원에서 개발했던 상지재활로봇 NREX 에 수동관절을 추가 적용하여 사용자가 움직일 때 로봇과 사 용자 간의 연결 부위에서 발생하는 힘과 토크를 감소시켜 착 용성을 향상시켰다. 사용자의 어깨가 보다 자유롭게 회전이 될 수 있도록 상지 운동 기구를 구현하면, 해당되는 회전축과 관련된 움직임을 포함하는 상지 운동을 할 때 상지의 힘이 덜 든다는 것을 확인하였다. 이를 통해 편마비를 가지거나 근력 이 약한 장애인이 외골격 형태의 로봇을 착용했을 때 착용감 을 향상시킬 수 있고 관절 회전 축의 오정렬로 인한 통증이나 불편함을 감소시켜 병원이나 시설에서 가정으로 복귀하여 더 편하게 상지 운동을 할 수 있는 기구를 제공할 수 있다. 추후과 제로 힘센서를 사용하지 않고 힘을 제어하는 기술[14]과의 융합 을 고려할 수 있다.
Acknowledgments
This project was supported by the Research Program of National Rehabilitation Research Institute, Korea National Rehabilitation Center [NRCTR-IN13004, NRCTR-IN14006, NRCTR-IN15005, NRCTR-IN16005].
References
- Health Insurance Review & Assessment Service, 100 Disease Statistics in Living, [Online], http://www.hira.or.kr/ebooksc/ebook_472/ebook_472_201803281057049800.pdf, Accessed: May 20, 2019.
- Healtip, Rehabilitation Exercise of Stroke Patients, [Online], http://www.healtip.co.kr/news/articleView.html?idxno=132, Accessed: May 20, 2019.
- J. H. Carr and R. B. Shepherd, Stroke rehabilitation: Guidelines for exercise and training to optimize motor skill, 1st ed. Oxford, Butterworth-Heinneman, 2003.
-
W.-K. Song, W.-J. Song, and J.-Y. Jung, “NREX: NRC Robotic Exoskeleton,” 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, pp. 454-456, 2013.
[https://doi.org/10.1109/URAI.2013.6677309]

-
M. H. Chun and J. H. Yi, “Robotics in rehabilitation for patients with brain disease,” Journal of the Korean Medical Association, vol. 56, no. 1, pp. 23-29, Jan., 2013.
[https://doi.org/10.5124/jkma.2013.56.1.23]
- R. A. R. C. Gopura, K. Kiguchi, and D. S. V. Bandara, “A brief review on upper extremity robotic exoskeleton systems, ” 2011 6th International Conference on Industrial and Information Systems, Kandy, Sri Lanka, 2011.
- F. Gemperle, C. Kasabach, J. Stivoric, M. Bauer, and R. Martin, “Design for wearability,” Second International Symposium on Wearable Computers (Cat. No.98EX215), Pittsburgh, PA, USA, 1998.
-
C. Sicuri, G. Porcellini, and G. Merolla, “Robotics in shoulder rehabilitation,” Muscles Ligaments and Tendons Journal, vol. 4, no. 2, pp. 207-213, 2014.
[https://doi.org/10.11138/mltj/2014.4.2.207]
- D. Koo, P. H. Chang, M. K. Sohn, and J.-H. Shin, “Shoulder Mechanism Design of an Exoskeleton Robot for Stroke Patient Rehabilitation,” 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 2011.
-
I. Galiana, F. L. Hammond, R. D. Howe, and M. B. Popovic, “Wearable Soft Robotic Device for Post-Stroke Shoulder Rehabilitation: Ide.jpgying Misalignments,” 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 2012.
[https://doi.org/10.1109/IROS.2012.6385786]
- W.-K. Song and J.-Y. Song, “Improvement of upper extremity rehabilitation Robotic Exoskeleton, NREX,” 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, 2017.
- R. A. R. C. Gopura and K. Kiguchi, “Mechanical designs of active upper-limb exoskeleton robots: State-of-the-art and design difficulties,” 2009 IEEE International Conference on Rehabilitation Robotics, Kyoto, Japan, 2009.
-
K. Kiguchi, M. H. Rahman, M. Sasaki, and K. Teramoto, “Development of a 3DOF mobile exoskeleton robot for human upper-limb motion assist,” Robotics and Autonomous Systems, vol. 56, no. 8, pp. 678-691, Aug., 2008.
[https://doi.org/10.1016/j.robot.2007.11.007]
-
J. H. Choi S. Oh, and J. An, “Sensorless Force Control with Observer for Multi-functional Upper Limb Rehabilitation Robot,” Journal of Korea Robotics Society, vol.12, no.3, pp.356-364, Sept., 2017.
[https://doi.org/10.7746/jkros.2017.12.3.356]
2009 인하대학교 항공우주공학과(공학사)
2009~현재 국립재활원 재활연구소 재활보 조기술연구과 연구원
관심분야: 로봇시스템 설계 및 제작

2018 대구대학교 기계공학과(공학사)
2018~현재 국립재활원 재활연구소 재활보 조기술연구과 연구원
관심분야: 로봇시스템 제어

2001 KAIST 전기및전자공학 전공(공학박사)
2001~2008 삼성SDI 책임연구원
2008~2014 국립재활원 재활연구소 재활보 조기술연구과 공업연구관
2014~현재 국립재활원 재활연구소 재활보 조기술연구과장
관심분야: 재활로봇, 보조로봇, 중개연구