직접 외란 추정을 통한 역구동성 유압 구동 시스템의 임피던스 제어

© Korea Robotics Society. All rights reserved.
Abstract
The backdrivable servovalve is a desirable component for force and interaction control of hydraulic actuation systems because it provides direct force generation mechanical impedance reduction by its own inherent backdrivability. However, high parametric uncertainty and friction effects inside the hydraulic actuation system significantly degrade its advantage. To solve this problem, this letter presents a disturbance-adaptive robust internal-loop compensator (DA-RIC) to generate ideal interactive control performance from the backdrivable-servovalve-based system. The proposed control combines a robust internal-loop compensator structure (RIC) with an explicit disturbance estimator designed for asymptotic disturbance tracking, such that the controlled system provide stable and ideal dynamic behavior for impedance control, while completely compensating the disturbance effects. With the aid of a backdrivable servovalve, we show that the proposed control structure can be implemented based on a simplified nominal model, and the controller enables implementation without accurate knowledge of the target system parameters and disturbances. The performance and properties of the proposed controller are verified by simulation and experiments.
Keywords:
Hydraulic actuators, Impedance control, Robust/Adaptive control1. 서 론
유압 구동 시스템은 최근 기존의 산업용 로봇뿐만 아니라 다족 보행 로봇, 협업로봇, 등 고도의 물리적 상호작용이 필요 한 분야로까지 확대되어 적용되는 추세이다.
유압 구동 시스템은 높은 부피대비 출력 및 내구성이 장점 이지만, 내부의 복잡하고 비선형적인 동역학적 특성과, 역구 동이 불가능한 특성으로 인하여[1], 이를 극복하기 위한 다양한 하드웨어[2-6] 혹은 제어기들이 제시되어 왔다[7-11]. 그러나, 이 러한 방법들은 대부분 유압 구동 시스템의 힘 제어 및 임피던 스 제어 성능을 확보하기 위해 힘 센서 혹은 액추에이터 내부의 압력 센서를 필수적으로 사용해야 한다는 한계점이 존재한다.
최근 힘 혹은 압력 센서를 사용하지 않고 유압 구동 시스템의 힘 제어를 실현하는 방법으로 역구동 서보밸브(backdrivable servovalve)를 이용하는 방안이 제시되었다[12,13]. 이 방안은 유 량 서보밸브 내부의 유량을 조절하는 스풀 동역학에 유압 구 동기로부터 오는 압력차를 피드백 하여, 유압 구동 시스템 전 체의 동역학을 전기모터 기반 구동 시스템의 것과 유사하게 변환시킨다는 특징이 있다. 그러나, 이에 대한 반대급부로, 시 스템 내부의 파라미터 불확정성(parametric uncertainty) 및 정 지 마찰과 같은 외란에 의한 영향을 보다 크게 받는다는 단점 또한 수반하게 된다. 이로 인해, 실제로 전기모터 기반 구동 시 스템에 적용되는 임피던스 제어기를 적용할 경우, 이러한 외 란으로 인하여 목표 위치로 시스템이 제대로 수렴하지 못하 고, 과도 응답 특성(transient response) 또한 영향을 받게 된다.
역구동 서보밸브 기반의 유압 구동 시스템의 고성능 임피 던스 제어를 구현하기 위해, 전술한 파라미터 불확정성 및 외 란을 효과적으로 억제할 수 있는 방안이 필요하다. 이러한 목 적을 달성하기 위하여 Disturbance observer (DOB)[13], adaptive robust control[14], internal model control (IMC)[15] 등의 강인 제 어 구조들이 개발되었으며, 이 방법들은 모두 본래 시스템과 동역학적 특성이 유사한 기준 모델을 설정하고, 모델 동역학 과 실제 동역학적 상태 오차를 최소화하도록 설계된 robust internalloop compensator (RIC) framework와 동등한 특성을 갖고 있음이 알려져 있다[16]. 그러나, 유압 구동 시스템의 특성상 내부 동역학 파라미터가 실시간으로 변할 수 있어(time-varying), 고정된 모델 파라미터를 사용하는 기존의 RIC 구조로는 모델과 실제 시스 템 간의 오차 동역학 내에 외란이 잔류하게 되어 영향을 완벽 히 제거하는 것이 어렵다.
이를 해결하기 위하여, 본 논문에서는 RIC의 오차 동역학 구조 내에 존재하는 외란을 점근적으로 추청(estimation) 하는 적응 알고리즘을 추가한 disturbance-adaptive RIC (DA-RIC)를 제시한다. 기준 동역학 모델에 기준 외란 요소를 추가하고, 이 외란 요소를 추정하는 알고리즘을 오차 동역학의 구조적 특성 을 이용하여 설계한다. 이를 통해, 시스템의 실제 동역학 파라 미터에 대한 정보가 부정확하더라도 동역학 오차 뿐만 아니라 외란 요소까지 실제 기준값에 점근적으로 수렴함을 보인다.
본 논문의 이후 구성은 다음과 같다. 2절에서는 역구동성 유압시스템의 문제와 기존 RIC 구조의 한계점에 대해 서술한 다. 3절에서는 DA-RIC를 구성하기 위한 기준 모델 및 외란 추 정 알고리즘을 설계하고, 이들의 성능을 검증한다. 4절에서는 시뮬레이션과 실험 결과를 통하여 제안된 제어기의 성능을 검 증하고, 5절에서 결론에 대하여 논한다.
2. 문제 정의
2.1 역구동성 유압 구동 시스템
역구동 서보밸브(Backdrivable servovalve) 혹은 압력제어 서보밸브(Pressure control servovalve)는 유압 구동 시스템의 힘 제어에 있어 몇 가지 이점을 가져다준다. [12]에 따르면, 역 구동 서보밸브는 그 자체의 역구동 특성으로 인하여 유압 구 동 시스템의 동역학을 마치 전기모터기반 구동 시스템처럼 동 작하도록 만든다[Fig. 1]. 역구동 서보 밸브를 포함한 1자유도 유압 시스템의 동역학은 아래의 수식들로 표현할 수 있다[17].
![[Fig. 1]](/xml/26110/JKROS-14-4-348_F1.jpg "[Fig. 1]")
Illustration of a hydraulic actuation system with backdrivable servovalve (Pressure control servovalve). The load pressure feedback mechanism in the servovalve makes the system behave as a torque generation system
| (1) |
| (2) |
| (3) |
| (4) |
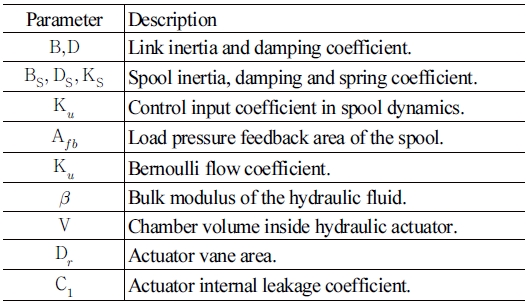
여기서 식 (1)은 액추에이터 압력차 PL, 외력 τext 및 마찰τf의 영향을 받아 링크 속도 를 출력하는 링크 동역학, 식 (2)는 제 어입력 u와 액추에이터 압력차 PL를 입력받아 서보밸브 스풀 의 위치 xs를 출력하는 스풀 동역학, 식 (3)은 유압 구동기 내 부의 유량(QL), -압력(PL) 관계식, 식 (4)는 서보밸브와 링크 사이에서 압력차 PL을 출력하는 유압 구동기 내부 챔버 동역 학을 나타내며, 각 변수에 대한 설명은 [Table 1]에 정리하였 다. [12]에 의하면, (2)-(4)는 아래와 같이 Laplace domain에서 표현될 수 있다.

Nomenclatures for hydraulic system dynamics
| (5) |
| (6) |
| (7) |
여기서 이며, 은 아래 식의 상수 근사치이다.
| (8) |
식 (1)에 식 (5)를 대입하여 전체 시스템 동역학을 아래와 같 이 표현할 수 있다.
| (9) |
a(t)>0이므로, 식 (9)의 양변을 a(t)로 나누면 아래와 같다.
| (10) |
여기서 이다. 결과적으로, 통합된 시스템 동역학 식 (10)은 간단한 2차 동역학 구조를 갖고 있는 것을 확인할 수 있다.
그러나, 마찰과 시변성(time-varying) 동역학 파라미터등의 요소들이 이 시스템을 이용한 위치 혹은 힘 제어에 상당한 악 영향을 끼친다.
2.2 Robust internal-loop compensator (RIC)의 특성 및 한계
[Fig. 2]는 RIC의 구조를 나타낸다. 이 제어 구조의 목표는 시스템의 실제 동역학(Σ)이 그와 유사한 기준 동역학(Σn)을 추종하여 동작하도록 하는 것에 있다. RIC의 두가지 중요한 특징이 존재하는데, 첫번째로, RIC를 구성하는데 기준 모델 동역학과 같이 설계되는 모델 추종 제어기(K)는 DOB 구조에서 의 Q-filter와 외란 추정에 있어 동등한 특성을 가지고 있다. 하지 만 DOB 구조에 비하여 외부에 위치 제어와 같은 추가적인 제어 기를 구성할 경우, 센서 피드백과 같은 실제 시스템에 대한 고려 없이 기준 동역학의 상태 정보만을 이용한 설계가 가능하며, 이 를 통한 시스템의 안정성의 조건 또한 크게 단순화된다[18].
![[Fig. 2]](/xml/26110/JKROS-14-4-348_F2.jpg "[Fig. 2]")
Structure of the robust internal-loop compensator (RIC). The model-following controller (K) is designed to make actual system dynamics behavior (Σ) follow that of the nominal dynamics (Σn)
그러나, 이러한 RIC의 모델 추종 제어기의 외란 추정 특성 이 오히려 그 자체의 모델 추종 제어 성능을 저하시킨다. 실제 시스템 동역학을 아래와 같이 표현된다고 가정하자.
| (11) |
여기서 이며, 일 경우 이 성립한다 고 가정한다. (11)의 기준 동역학을 아래와 같이 설계할 수 있다.
| (12) |
여기서 기준 동역학 파라미터 은 상수이며, 기준 외란 dn(t)은 3절에서 보다 자세히 다루기 위해 포함되었다. 식 (11) 과 식 (12)로부터 아래와 같이 오차 동역학을 도출할 수 있다.
| (13) |
여기서 enr = xn - x 는 모델 추종 오차, 및 는 파라미터 오차, 그리고 dex는 파라미터 불 확정성과 기타 외란들의 영향이 포함된 전체 외란을 나타낸 다. 기존 RIC 구조상에서는 아래와 같은 적절한 형태의 모델 추종 제어기 uk를 설계함으로써 식 (13)의 모델과 관련된 오차 는 상쇄시킬 수 있다.
| (14) |
여기서 Kk>0는 모델 추종 제어 이득값이며, 식 (14)를 식 (13)에 대입하면 아래와 같다.
| (15) |
여기서 이다. 식 (15)로부터 아래의 Lyapunov 함 수를 도출함으로써 모델 추종 오차의 안정성과 수렴성을 확인 할 수 있다.
| (16) |
이를 시간에 대하여 미분하면
| (17) |
이는 곧 아래의 조건을 만족할 경우 임을 의미한다.
| (18) |
기존 RIC 구조는 dn(t) = 0이므로, 정상 상태에서 외란의 영향이 존재할 경우 enr의 uniform-ultimate boundedness (UUB) 만을 보장할 수 있다. 이러한 상황은 역구동 서보밸브 기반의 유압시스템에 존재하는 내부 정지마찰로 인해 발생하는 제어 성능 저하에 대응한다.
3. Disturbance-adaptive Robust Internal-loop Compensator
3.1 외란 추정기 설계
본 절에서는 RIC의 모델 추종 제어 성능을 향상시키기 위해 외란 추정기를 설계하고, 이를 RIC 구조와 융합하여 Disturbanceadaptive robust internal-loop compensator를 구성한다[Fig. 3]. 이를 통하여 모델 추종 오차 enr 과 외란 오차 모두 점근적으 로 0으로 수렴하도록 만들고자 한다.
![[Fig. 3]](/xml/26110/JKROS-14-4-348_F3.jpg "[Fig. 3]")
Explicit disturbance estimator on RIC structure. The estimator can be designed by indirect disturbance error feedback using model-following error dynamics
본 설계는 모델 추종 오차 동역학 식 (15)에서, 가 enr로 표현 될 수 있다는 점에 착안한다. 이를 기반으로 외란 추정 알고리즘 설 계를 위해, 식 (16)을 확장한 다음 Lyapunov function 을 고려한다.
| (19) |
여기서 은 상수인 추정 이득 대각 행렬이다. 식 (19) 를 시간에 대하여 미분하면
| (20) |
식 (15)에서의 외란 오차와 모델 추종 오차 간 관계를 이용 하여, composite parameter adaptation scheme[19] 형태의 외란 추정 알고리즘을 아래와 같이 설계할 수 있다.
| (21) |
| (22) |
여기서 이므로, 다음 이 성립한다.
| (23) |
따라서, 기존 RIC 구조에 비해 Γ를 증가시킴으로써 모델 추 종 오차의 수렴 반경을 보다 더 축소시킬 수 있다. 이에 더하여, RIC 구조 상의 외부 루프 제어기 uc가 기준 시스템을 안정화 시키도록 설계되었다면, 정상 상태에서 이 성립하게 된다. 식 (23)에서 미루어 볼 때, 이는 최종적으로 V와 ξ가 0으 로 점근적으로 수렴함을 의미한다. 결론적으로, 설계한 DARIC를 통하여 모델 추종 오차 enr과 외란 오차 모두 점근적 으로 0으로 수렴하도록 만드는 것이 가능하다.
3.2 성능 분석 및 물리적 해석
DA-RIC의 성능 최적화를 위해, 추정된 외란의 거동과 설계 에 사용되었던 제어 이득값의 역할에 대한 분석이 필요하다. 추정된 외란 동역학은 식 (21)로부터 도출 가능하다. 식 (21)에 라플라스 변환을 적용하면,
| (24) |
식 (24)를 식 (15)의 라플라스 변환식에 대입하면
| (25) |
따라서, 추정된 외란의 값은 실제 확장된 외란값의 2-1 lowpass filter를 적용한 값과 같다. 또한, 모델 추종 오차의 동역학은 식 (24)에 식 (25)를 재 대입함으로써 아래와 같이 얻을 수 있다.
| (26) |
식 (26)으로부터, 모델 추종 제어 및 외란 추정 알고리즘의 이득값 각각의 역할에 대한 분석이 가능하다. 첫째로, [Fig. 4] 에서 확인 가능하듯 외란 추정 오차 이득값은 enr를 0으로 수 렴시키는 데 필수적이다. 즉, 외란 추정 알고리즘이 I 제어와 같이 작용하는 것으로 해석할 수 있다. 반면, 외란 추정 이득값 이 0일 경우, 유한한 모델 추종 오차가 잔류하여, 모델 추종 제 어 이득 Kk를 증가시킴으로써 그 값을 감소시키는 것만 가능 하다. 또한 Kk는 enr의 수렴 속도에 크게 관여하며, σ는 추정 된 외란의 수렴 속도에 관여한다.
![[Fig. 4]](/xml/26110/JKROS-14-4-348_F4.jpg "[Fig. 4]")
Frequency responses of model-following error enr with (blue line) and without explicit disturbance estimation (red line)
참고로, 위 분석으로부터 외란 추정 성능이 정확한 실제 값 을 알기 힘든 실제 시스템의 파라미터의 영향 없이 전적으로 설정 가능한 제어 이득값에 의해 결정된다는 것을 알 수 있다.
3.3 역구동성 유압 시스템에의 적용
DA-RIC를 역구동성 유압 시스템에 적용하기 위한 첫번째 단계로서, 아래와 같이 식 (10)을 기반으로 한 기준 동역학을 설정한다.
| (27) |
식 (27)과 식 (10)의 오차 동역학은 아래와 같다.
| (28) |
여기서 이다. 모델 추종 제어 uk를 아래와 같이 설정하면,
| (29) |
식 (28)은 다음과 같이 표현될 수 있다.
| (30) |
여기서 이다. 전 절의 분석을 이용, 아래와 같은 외란 추정 알고리즘을 사용한다.
| (31) |
식 (30)의 안정성은 아래의 Lyapunov function으로 증명 가능하다.
| (32) |
이로써 실제 동역학과 기준 동역학 사이의 수렴성이 보장 되었으므로, 외부 루프 임피던스 제어기를 기준 동역학 기반 으로 설계할 수 있다. 본 논문에서는 문제의 단순화를 위해 PD 위치제어기 형태에 추정된 외란값을 더하여 외부 제어기로 사 용한다.
| (33) |
참고로, 식 (33)에서 실제 시스템의 위치 q가 아닌 기준시스 템의 qn을 피드백 신호로 사용하였는데, 이는 RIC의 이점으로 서, 실제 시스템의 동역학이나 외란의 영향 없이 이상적인 외 부 루프 제어 성능을 확보할 수 있도록 해 준다.
4. 시뮬레이션 및 실험
4.1 시뮬레이션
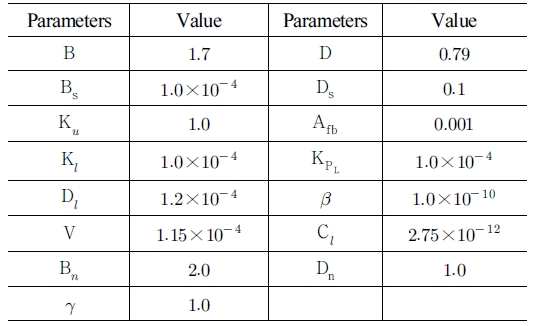
제안한 제어기의 성능을 선검증하기 위해, MATLAB을 이 용한 시뮬레이션을 수행하였다. 시스템 동역학은 식 (1)~(4), 기준 동역학은 식 (28)을 기반으로 구현하였다. 사용된 시스템 파라미터는 실제 시스템 파라미터와 유사한 값을 사용하였으 며, 이 값은 [Table 2]에 정리하였다. 제어 이득값의 경우 Kp = 100, Kd = 1, λ = 10, Γ = 100을 사 용하였다.
Parameters of the simulated system
시뮬레이션 결과는 [Fig. 5]에서 확인할 수 있다. 시스템에 사인파형 기준 경로와 무작위 외부 토크를 가했을 때 [Fig. 5(a)], 실제 액추에이터의 각도(q)가 기준 모델의 각도(qn)를 점근적으로 추종하는지를 검증하였다. [Fig. 5(b)] 에서 확인할 수 있듯이, 기준 동역학이 외부 PD 제어기로 인해 유연하게 거 동하는 것을 확인할 수 있다. 한편, RIC의 모델 추종 제어기로 인해 q가 qn를 추종하는것 또한 확인할 수 있다. 그러나, 외란 추정 알고리즘으로 인해 그 추종 성능에 차이가 나게 되는데, 이는 [Fig. 5(c)]에서 확인할 수 있다. [Fig. 5(c)] 및 실험에서 에 서 나타나는 RIC와 DA-RIC 추종 오차 간의 정량적 성능 비교 를 위하여 아래의 Integral Absolute Error (IAE) 성능 지표를 사 용하였다.
![[Fig. 5]](/xml/26110/JKROS-14-4-348_F5.jpg "[Fig. 5]")
Simulation result with RIC & DA-RIC
| (34) |
기존 RIC 구조(파란 선)의 경우, 순간 최대 오차 0.15 rad 및 0.9014의 IAE 값을 보이는 데 비해, DA-RIC를 사용하였을 경우 (붉은 선) 순간 최대 오차가 약 0.02 rad 및 IAE 값이 0.711로 현저 히 작고, 또한 오차가 시간이 지남에 따라 0에 점근적으로 수렴함 을 확인할 수 있다. 마지막으로 DA-RIC를 사용할 경우, [Fig. 5(d)]에서 확인할 수 있듯이 추정된 외란(dn)이 모델 오차 동역학 내 통합 오차(dex)를 점근적으로 추종하는 것을 확인 가능하다.
4.2 실험
시뮬레이션에서 검증된 DA-RIC의 성능을 실제 1자유 도 역 구동성 유압 시스템[Fig. 6]에 적용하여, 의도대로 동작하는지 를 확인하였다. 실험 시스템은 역구동 서보밸브(Moog pressure control valve 15-170), 유압 구동기(KNR Intima- RH), 관절토크 센서(HBM TB2) 및 엔코더(GPI A36S)로 구성하였다.
![[Fig. 6]](/xml/26110/JKROS-14-4-348_F6.jpg "[Fig. 6]")
Experimental setup
실험은 시뮬레이션의 경우와 동일한 모델 파라미터와 제어 이득값을 적용하였으며, 실험 시작 5초 이후 20 deg의 계단형 기준 경로 및 실험자가 직접 가하는 무작위 외력([Fig. 7]의 세 번째 열)을 시스템에 입력하였다. [Fig. 7], [Fig. 8]의 첫번째 열 에서 확인할 수 있듯이, 시뮬레이션의 결과와 유사한 PD 제어 기의 거동과 모델 추종 제어기의 성능을 확인 가능하다. 모델 추종 오차는 기존 RIC만을 적용하였을 경우([Fig. 7]의 두번째 열) 최대 약 4 deg의 순간 최대 오차 및 27.0754의 IAE 값을 가 지는 데 비해, DA-RIC를 적용했을 때는([Fig. 8]의 두번째 열) 최대 순간 오차가 약 1 deg, IAE 값은 8.5517로 상당히 작으며, 정상 상태 오차 또한 외란 추정기로 인해 사라진 것을 확인할 수 있다. 마지막으로, DA-RIC를 사용하였을 때 추정된 외란의 값은[Fig. 9]에서 확인할 수 있으며, 시뮬레이션에서 확인하였 던 실제 외란을 점근적으로 추정하는 특성을 고려해 볼 때 이 값이 실제 외란의 값과 유사할 것으로 생각된다.
![[Fig. 7]](/xml/26110/JKROS-14-4-348_F7.jpg "[Fig. 7]")
Experimental result with RIC
![[Fig. 8]](/xml/26110/JKROS-14-4-348_F8.jpg "[Fig. 8]")
Experimental result with DA-RIC
![[Fig. 9]](/xml/26110/JKROS-14-4-348_F9.jpg "[Fig. 9]")
Estimated disturbance profile with DA-RIC
5. 결 론
본 논문에서는 disturbance-adaptive robust internal-loop compensator (DA-RIC)를 제시하여, 역구동성 유압 시스템 내 부의 마찰 및 파라미터 불확정성과 같은 외란을 억제하고, 강 인 제어 성능을 최대화하고자 하였다. 이를 위해 기존 RIC 구 조에 외란 추정 알고리즘을 추가하였으며, 이를 통해 RIC의 오차 동역학 내부에 존재하는 외란의 영향을 상쇄시킴으로써 RIC의 모델 추종 제어 성능이 향상됨을 보였다. 또한, 시뮬레 이션 및 실험을 통하여 실제로 기존 RIC 구조에 비하여 모델 오차 추종 오차가 상당히 감소하고, 추종된 외란 또한 실제 점 근적으로 0에 수렴함을 검증하였다. 유압 구동 시스템의 상호 작용 제어에 이점을 가지나 정지 마찰력과 같은 외란요소에 취약한 역구동 서보밸브의 제어 강인성을 DA-RIC를 통해 보 강하여, 향후 이를 기반으로 한 협업 로봇이나 다족 보행 로봇 을 위한 임피던스 제어 등에 응용할 수 있을 것으로 전망된다. 또한, 개발된 외란 추정기는 시스템의 모델링이 정확하고 외 란이 존재하지 않는 이상적인 경우에는 외력 추정기로 간주하 는 것 또한 가능하기 때문에, 추정된 외란 정보를 보상만이 아 닌 다른 방법으로 활용하는 방법에 대한 고찰 또한 필요하다.
Acknowledgments
This study was supported by the Industrial Technology Innovation Program, 10048358, funded by the Ministry of Trade, Industry & Energy (MI, Korea)
References
-
A. Alleyne and R. Liu, “On the limitations of force tracking control for hydraulic servosystems,” Journal of Dynamic Systems, Measurement, and Control , vol. 121, no. 2, pp. 184–190, Jun., 1999.
[https://doi.org/10.1115/1.2802453]

-
T. Boaventura, C. Semini, J. Buchli, M. Frigerio, M. Focchi, and D. G. Caldwell, “Dynamic torque control of a hydraulic quadruped robot,” 2012 IEEE International Conference on Robotics and Automation (ICRA), Minnesota, USA, pp. 1889–1894, 2012.
[https://doi.org/10.1109/ICRA.2012.6224628]
-
T. Boaventura, G. A. Medrano-Cerda, C. Semini, J. Buchli, and D. G. Caldwell, “Stability and performance of the compliance controller of the quadruped robot HyQ,” 2013IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, pp. 1458–1464, 2013.
[https://doi.org/10.1109/IROS.2013.6696541]
-
J. Yao, Z. Jiao, B. Yao, Y. Shang, and W. Dong, “Nonlinear adaptive robust force control of hydraulic load simulator,” Chinese Journal of Aeronautics, vol. 25, no. 5, pp. 766–775, Oct., 2012.
[https://doi.org/10.1016/S1000-9361(11)60443-3]
-
J. Koivumaki and J. Mattila, “Stability-guaranteed force-sensorless contact force/motion control of heavy-duty hydraulic manipulators,” IEEE Transactions on Robotics, vol. 31, no. 4, pp. 918–935, Aug., 2015.
[https://doi.org/10.1109/TRO.2015.2441492]
-
J. Koivumaki and J. Mattila, “Stability-guaranteed impedance control of hydraulic robotic manipulators,” IEEE/ASME Transactions on Mechatronics, vol. 22, no. 2, pp. 601–612, Apr., 2017.
[https://doi.org/10.1109/TMECH.2016.2618912]
-
W. Lee, M. J. Kim, and W. K. Chung, “Joint torque servo control of electro-hydrostatic actuators for high torqueto- weight ratio robot control,” 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, pp. 368–375, 2016.
[https://doi.org/10.1109/IROS.2016.7759081]
-
H. Kaminaga, T. Amari, Y. Niwa, and Y. Nakamura, “Development of knee power assist using backdrivable electrohydrostatic actuator,” 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , Taipei, Taiwan, pp. 5517–5524, 2010.
[https://doi.org/10.1109/IROS.2010.5650671]
- D. W. Robinson and G. A. Pratt, “Force controllable hydroelastic actuator,” 2000 IEEE International Conference on Robotics and Automation, San Fransisco, USA, pp. 1321–1327, 2000.
-
A. H. A. Stienen, E. E. G. Hekman, H. ter Braak, A. M. M. Aalsma, F. C. T. van der Helm, and H. van der Kooij, “Design of a rotational hydroelastic actuator for a powered exoskeleton for upper limb rehabilitation,” IEEE Transactions on Biomedical Engineering, vol. 57, no. 3, pp. 728–735, Mar., 2010.
[https://doi.org/10.1109/TBME.2009.2018628]
-
S. Yoo, J. Lee, J. Choi, G. Chung, and W. K. Chung, “Development of rotary hydro-elastic actuator with robust internal-loop-compensator-based torque control and crossparallel connection spring,” Mechatronics, vol. 43, pp. 112–123, May, 2017.
[https://doi.org/10.1016/j.mechatronics.2017.03.003]
- S. Yoo, W. Lee, and W. K. Chung, “Intrinsically backdrivable hydraulic servovalve for interactive robot control,” 2017 IEEE International Conference on Robotics and Automation(ICRA), Singapore, pp. 51–57, 2017.
-
K. Ohnishi, M. Shibata, and T. Murakami, “Motion control for advanced mechatronics,” IEEE/ASME Transactions on Mechatronics, vol. 1, no. 1, pp. 56–67, Mar., 1996.
[https://doi.org/10.1109/3516.491410]
-
B. Yao, M. Al-Majed, and M. Tomizuka, “High-performance robust motion control of machine tools: an adaptive robust control approach and comparative experiments,” IEEE/ASME Transactions on Mechatronics, vol. 2, no. 2, Jun., pp. 63–76, 1997.
[https://doi.org/10.1109/3516.588624]
-
H. A. Zhu, G. S. Hong, C. L. Teo, and A. N. Poo, “Internal model control with enhanced robustness,” International Journal of Systems Science, vol. 26, no. 2, pp. 277–293, 1995.
[https://doi.org/10.1080/00207729508929036]
-
B. K. Kim, H.-T. Choi, W. K. Chung, and I. H. Suh, “Analysis and design of robust motion controllers in the unified framework,” Journal of Dynamic Systems Measurement and Control, vol. 124, no. 2, pp. 313–320, Jun., 2002.
[https://doi.org/10.1115/1.1468995]
- H. Merritt, H. E. Merritt, and H. E. Merritt, Hydraulic Control Systems, John Wiley & Sons, 1967, ch. 7, sec. 3, pp. 194.
-
M. J. Kim and W. K. Chung, “Disturbance-observer-based pd control of flexible joint robots for asymptotic convergence.” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1508–1516, 2015.
[https://doi.org/10.1109/TRO.2015.2477957]
-
J.-J. E. Slotine and W. Li, “Composite adaptive control of robot manipulators,” Automatica, vol. 25, no. 4, pp. 509–519, Jul., 1989.
[https://doi.org/10.1016/0005-1098(89)90094-0]

2012 포항공과대학교 기계공학과(학사)
2012~현재 포항공과대학교 기계공학과 석박사통합과정
관심분야: Hydraulic actuation, Robust control, Force & impedance control

1981 서울대학교 기계설계학과(공학사)
1983 한국과학기술원 기계공학과(석사)
1987 한국과학기술원 생산공학과(공학박사)
1987~1993 포항공과대학교 기계공학과 조교수
1988 CMU 방문 교수
1995 U.C Berkeley visiting scholar
1993~2000 포항공과대학교 부교수
2000~현재 포항공과대학교 교수
관심분야: Hydraulic actuator, Medical robots, Microfluidic system, Robust control, Robot manipulation