착용감 구현을 위한 증강현실용 햅틱 상의(上衣)

© Korea Robotics Society. All rights reserved.
Abstract
Haptic systems have been widely used for both virtual reality and augmented reality application including game, entertainment, education and medical sectors. Clothing designers and retailers initiated using AR and VR technologies to help the consumers find style with the perfect fit. Most of the developed augmented reality shopping is implemented by overlapping the image of the clothes on the customer so that he/she can find the fit. However, those are only visual information and the customer cannot experience the real size and the .jpgfness of the clothes. In this paper, we present the haptic upper garment which provides the haptic feedback to the user using cables. By controlling the length of the cable, the size of the clothes is set and by .jpgfness control, the compliance of the fabric is implemented. The haptic garment is modeled for precise control and the distributed controller architecture is described. With the haptic upper garment, the user’s experience of the virtual clothes is greatly enhanced.
Keywords:
Augmented reality, Haptic upper garment, Wear sensation1. 서 론
증강현실 기술은 개발 초기 단계에는 게임 등 엔터테인먼트 산업을 중심으로 발전하였으나, 최근 의료, 교육, 쇼핑, 제조업 등 다양한 산업으로 적용되고 있다. 특히 패션 쇼핑의 경우 2016년 eBay가 Myer 백화점과 합작하여 세계 최초의 가상현 실 백화점을 시작하였고, 국내에도 가상현실 스토어 서비스를 시작하고 있다[1]. 특히 Zara, Burberry, Rixo, Chanel, Swarovski 등 다수의 패션 기업들[2]은 옷을 직접 입지 않아도 디스플레이 를 통해 옷을 입은 모습을 미리 확인할 수 있는 스마트 미러, 증 강현실을 통해 원하는 아이템을 입어볼 수 있는 AR 피팅존등 을 시도하고 있다[3]. 최근 국내에서도 가상현실 회사들이 디지 털 거울 형태의 디스플레이 앞에서 사용자의 신체 사이즈를 즉시 측정하여 3차원 의상을 입어볼 수 있게 해주는 장비를 개 발하여 가상 피팅(fitting) 서비스를 제공한다[4]. 그러나 이러한 방법은 사용자가 실제 옷을 착용하였을 때의 정확한 착용감이 나 핏(fit)을 실감할 수 없는 한계가 있다[5-7]. [Fig. 1]과 같이 옷 의 스타일과 디자인, 색을 선택한 후 실제 착용한 후 구매로 이 루어지는 일반적인 구매 과정에서 착용감을 느낄 수 있도록 하는 햅틱 과정은 큰 도움이 될 것으로 예상한다. 온라인 매장 에서 구입한 옷을 받은 후에 사이즈나 착용감 문제로 인하여 반품하는 경우가 자주 생기며 이는 구입자와 판매자 모두에게 바람직하지 않은 영향을 준다.
![[Fig. 1]](/xml/26131/JKROS-14-2-150_F1.jpg "[Fig. 1]")
Typical procedure for clothes purchase
따라서 본 연구에서는 매장에서 모든 종류와 사이즈의 옷 을 구비하고 있지 않더라도 사용자가 햅틱 상의를 이용하여 착용감을 실제로 느낄 수 있도록 하며, 만약 필요하다면 원하는 부분의 사이즈를 체험하여 찾고 이의 수정을 통하여 자신에게 가장 적합한 옷을 구입할 수 있도록 도움을 주는 장비를 구현 하는 것이 목적이다.
햅틱수트의 가장 중요한 요소는 무게 및 부피이다. 현재 실 용화된 시스템들은 모두 합성된 이미지를 통한 시각적인 가상 피팅을 제공하고 있으므로, 이러한 방법과 비교하여 햅틱 상 의를 착용하는 것이 무겁고 불편하다면 제안하는 방법의 실용 성이 떨어진다. 특히 신체에 밀착되는 의류의 경우에는 착용 자 체형 및 옷감의 특성에 따라 착용감이 크게 다를 수 있다. 본 논문에서는 케이블 방식의 햅틱 상의를 개발하여 케이블의 길 이로 사이즈를 조절하며, 케이블을 구동하는 모터의 탄성도 (.jpgfness)를 제어하여 옷 소재의 신축성 및 움직일 때의 편안 함을 경험할 수 있도록 하였다. 케이블을 이용한 햅틱장치는 Phantom을 비롯하여 힘궤환 기능을 갖는 상용화된 기기들이 다수 있으며, 가장 큰 장점은 원격 동력 전달의 편리성과 모터 등 엑츄에이터를 원하는 곳에 위치할 수 있는 점이다. Phantom 과 달리 동력 전달을 위한 용도가 아니라 케이블 끝에 직접 손 가락을 걸어 공간상의 힘을 느낄 수 있는 햅틱장치에 대한 연 구도 다수 발표되었다[8,9]. 그러나 직접 입은 형태로 착용감을 느끼도록 하는 햅틱장치에 대한 연구는 거의 진행되지 않았 다. 본 논문에서는 케이블을 사용하는 햅틱 상의에 대한 연구 결과에 대하여 기술한다. 이의 개발을 위하여 상체의 움직임 에 대한 주요 영향 부분을 설정하여 모델링한 후, 이 모델에 따 른 케이블의 개수, 이동 범위, 케이블 제어 방법 등에 대한 연 구를 수행하였다.
2. 햅틱 상의 설계
본 논문의 상의는 팔의 길이나 둘레 치수는 고려하지 않고 가슴 및 허리부분의 착용감과 위팔의 움직임에 대한 햅틱 구 현을 목적으로 하였다. 가슴과 허리부분은 둘레 치수가 중요 하며 상체의 움직임에 대한 신축성이 주 관심 대상이다. 위팔 을 들어 올리거나 앞으로 뻗을 때 가장 중요한 요소는 옷의 진 공(Armhole) 치수이다.
착용하고자 하는 상의가 몸에 밀착하는 옷의 예를 들면, 이 러한 옷을 입었을 때 옷의 사이즈와 옷감의 탄력성을 느끼게 하 기 위하여 높이에 따른 둘레 길이와 탄력성을 케이블을 사용하 여 실감할 수 있도록 하는 것이 목적이다. 이를 위하여 [Fig. 2] 와 같이 높이에 따른 케이블의 길이를 실제 옷의 사이즈와 동일 하게, 또한 옷감의 탄력성에 따라 장력을 조절할 필요가 있다.
![[Fig. 2]](/xml/26131/JKROS-14-2-150_F2.jpg "[Fig. 2]")
An upper garment silhouette and cable movement for size and .jpgfness realization
실제 옷을 착용한 경우의 개념도는 [Fig. 3]과 같으며 둘레 방향의 케이블과 양쪽 진공의 치수를 구현하는 케이블을 표시 하였다. 가장 이상적인 방법은 상의 전체를 매우 많은 케이블 을 사용하여 마치 옷을 만들 듯이 케이블로 옷을 직조하는 것 이나 이는 많은 수의 케이블과 각 케이블을 제어하는 모터 및 제어기가 필요하므로 비현실적이다.
![[Fig. 3]](/xml/26131/JKROS-14-2-150_F3.jpg "[Fig. 3]")
Concept of the cable driven size and .jpgfness realization for armhole, chest and waist
본 연구에서는 풀리가 부착된 1개의 카트가 레일을 따라 상 하로 고속으로 이동하며 순차적으로 각 부분의 사이즈와 탄력 성을 느낄 수 있는 구조를 설계하였으며, 양 쪽 진공 부분에는 독립된 모터를 사용하였다. 최종 설계도는 [Fig. 4]와 같다.
![[Fig. 4]](/xml/26131/JKROS-14-2-150_F4.jpg "[Fig. 4]")
Haptic upper garment design
가슴부분의 좌우에 레일이 각각 하나씩 고정되며 이를 따 라 상하로 카트가 움직이며 상의의 우측(착용자 기준 방향) 카 트에는 풀리가 고정되고 허리의 모터축에 고정된 풀리에 감긴 케이블은 우측 카트의 풀리를 거쳐 좌측의 레일을 따라 상하 로 움직이는 카트에 고정된다. 햅틱 상의의 무게를 줄이기 위 하여 카트이동용 모터 2개와 케이블 제어용 모터는 모두 허리 벨트에 고정하였다. 양쪽 진공 부분에는 각각의 모터가 진공 사이즈에 따라 케이블의 길이와 장력을 제어한다. [Fig. 5]와 같이 레일상의 카트의 상하 위치를 제어하는 2개의 모터, 케이 블을 제어하는 모터, 양 쪽 진공부분의 케이블을 제어하는 2개 의 모터를 사용하여 총 5개의 모터를 사용한다.
![[Fig. 5]](/xml/26131/JKROS-14-2-150_F5.jpg "[Fig. 5]")
Motors, wires and rails used for an upper garment
상의는 중앙 부분을 절개하여 다양한 옷 사이즈를 구현하 도록 하였으며 절개된 부분을 케이블로 연결하여 케이블의 길 이로써 착용한 옷의 사이즈가 결정되고 케이블이 연결된 모터 의 .jpgfness를 제어하여 옷감의 탄력성을 느낄 수 있도록 설계 하였다. 가슴과 허리 부분을 위에서 본 구조는 [Fig. 6]과 같다.
![[Fig. 6]](/xml/26131/JKROS-14-2-150_F6.jpg "[Fig. 6]")
Size and .jpgfness realizations with cable for chest and waist
진공부분은 [Fig. 7]과 같이 상의의 외부를 케이블로 감아, 이 케이블의 길이와 장력을 제어하는 구조이다.
![[Fig. 7]](/xml/26131/JKROS-14-2-150_F7.jpg "[Fig. 7]")
Armhole size and .jpgfness realization with cable
모터는 ㈜로보티즈의 Dynamixel XH430-W210-R, 케이블 은 DAIICHI社의 Kevlar 4호를 사용하였다. 풀리는 반경 10 mm로 3D 프린터를 이용하여 제작하였다. [Fig. 8]의 벨트에 부착된 양쪽 2개의 모터는 각 카트의 상하 이동을 제어하며 중 앙의 모터는 케이블 장력을 제어한다.
![[Fig. 8]](/xml/26131/JKROS-14-2-150_F8.jpg "[Fig. 8]")
A Belt with cart u/down drive motor and a cable drive motor
가슴 부분 좌우측의 레일에는 카트가 상하로 움직이며 햅 틱 상의 착용을 쉽게 하기 위하여 케이블 끝은 [Fig. 9]와 같이 고리로 좌측 카트에 연결된다.
![[Fig. 9]](/xml/26131/JKROS-14-2-150_F9.jpg "[Fig. 9]")
Left rail, a cart, an anchorage and a pulley
양측 진공 크기 제어용 모터 및 레일로 구성된 햅틱 상의와 모터가 부착된 벨트는 [Fig. 10]과 같다.
![[Fig. 10]](/xml/26131/JKROS-14-2-150_F10.jpg "[Fig. 10]")
Haptic upper garment
햅틱 상의에 사용된 요소들의 무게를 측정한 결과, 각 어깨 에 부탁된 모터는 개당 84 g이며 가슴에 부착된 레일 두 개의 무게는 32 g, 카트 두 개의 무게는 10 g이다. 벨트에는 총 3개의 모터가 부착되어 합계 252 g의 무게가 벨트에 추가된다.
3. 햅틱 상의 모델링 및 제어
장력 제어용 모터는 모터의 회전축에 풀리를 고정하여 풀 리에 감긴 케이블에 의하여 힘을 발생한다. 레일은 폭(33 mm) 에 비하여 두께(0.4 mm)가 충분히 얇은 금속 판재를 사용하여 상의에 고정되므로 레일 자체는 횡방향 힘에 대하여 강체로 가정할 수 있다. 상의의 옷감 종류에 따라 다양한 신축성을 갖 게 되므로 옷감의 탄성값 및 모터에서 발생한 힘에 의한 변형 을 고려해야 한다. 따라서 [Fig. 11]과 같은 모델을 사용한다. 옷감에 부착된 레일에 위치한 모터에 연결된 케이블에 의하여 장력이 발생하면 레일이 가슴 중앙쪽으로 이동하며 이에 대한 위치 변화에 대한 모델이다. 레일은 상호 대칭형으로 고정되 었으므로 [Fig. 11]은 우측 레일에 대한 모델이다.
![[Fig. 11]](/xml/26131/JKROS-14-2-150_F11.jpg "[Fig. 11]")
Modeling of the rail fixed to the clothes and cable tension
[Fig. 11]에서 레일의 길이는 L, 카트에 부착된 풀리의 위치는 가장 아래 점 P에서 거리 a 떨어진 곳 Q에 위치하며 힘 Fm을 발생 한다. 힘 Fm에 의한 가장 아래 점에서의 가로방향 옷감의 변형량 은 Δl, 가장 윗 점에서의 변형량은 Δu이고, 레일의 횡방향 변형은 없으므로 레일상의 임의의 위치 변형량은 선형적으로 변한다. 또 한 옷감의 탄성계수 값이 매우 크므로 다음과 같은 가정에 의하여
| (1) |
회전각은 매우 작은 값으로 가정한다. 점 P에서 높이 y인점의 미소 단위 조각 dy에 대하여 힘의 평형을 만족하기 위하여 다 음과 같은 식이 성립한다.
| (2) |
여기서 Kf는 단위 높이당 옷감의 탄성계수이며,
| (3) |
| (4) |
이며
| (5) |
의 관계식을 얻는다. 또한 P점에서의 모멘트의 평형을 만족하 기 위하여 다음과 같은 관계가 성립한다.
| (6) |
식 (3)을 대입하면,
| (7) |
이고 이를 정리하면,
| (8) |
의 관계식을 얻는다. 식 (5)와 식 (8)을 연립하여 다음과 같이 최 하점, 최상점, 그리고 Q점에서의 변형량인 은 각각
| (9) |
| (10) |
| (11) |
와 같으며, 식 (11)을 다음과 같이 정리하여
| (12) |
레일의 길이 L, 옷감의 단위 높이당 탄성계수 Kf, 모터의 위치 a 로 표현한 Q점의 탄성계수 Kc를 다음과 같이 구할 수 있다.
| (13) |
케이블 장력을 제어하는 모터를 다음 식과 같은 .jpgfness 제어 방법을 사용하며
| (14) |
여기서 ∆m은 모터축의 회전을 케이블 길이로 변화한 값이며 그 식은 다음과 같다.
| (15) |
여기서 r은 풀리의 반지름, ∆θm은 모터축의 회전량이다. 옷감과 케이블이 직렬로 연결된 것이므로 총 탄성계수 값은
| (16) |
| (17) |
과 같이 구할 수 있다. 신축도가 높은 옷감을 사용하였을 경우 는 식 (17)의 값을 사용하며, 대부분의 옷감의 경우 이므로 총 탄성계수는 다음과 같이 가정할 수 있다.
| (18) |
카트 이동 모터와 장력 제어 모터를 벨트에 부착하였으므로 이 들에 대한 기구학 구조는 [Fig. 12]와 같고, 이를 수식으로 표현하면,
| (19) |
![[Fig. 12]](/xml/26131/JKROS-14-2-150_F12.jpg "[Fig. 12]")
Modeling of the cart position, cable length and the distance between carts
의 관계가 성립한다. 여기서 C는 장력제어 케이블의 길이, V는 모터 중심축으로부터 카트 중심까지의 거리, H는 풀리의 중심 에서 우측 카트 고정점까지의 거리, r은 풀리의 반지름이다. m1,R 과 m1,L의 모터는 카트의 위치제어를 담당하며 양측의 모터는 동 일한 제어 특성을 갖고 양측 카트의 거리 V는 같다고 가정한다.
따라서 [Fig. 13]과 같이 현재 카트 위치에서 착용자가 느끼 는 상의 둘레의 길이 변화량 ΔH는 양쪽 카트 중심을 기준으 로 좌우 대칭이므로 다음 식과 같이 표현된다.
| (20) |
![[Fig. 13]](/xml/26131/JKROS-14-2-150_F13.jpg "[Fig. 13]")
Modeling of the changes of the position, cable length and the distance between carts
연구에 사용한 모터는 내부 전류 제어를 통하여 출력 토크 를 제어하나 토크 센서를 사용한 출력 궤환이 없으므로 실험 을 통한 실측값을 사용하여 보정하였다. [Fig. 14]와 같이 모터 축에 풀리를 연결한 후 모터 명령 값과 계측기로 측정한 케이 블의 장력을 lookup 테이블로 사용하여 원하는 장력 생성을 위 한 명령 값을 선정한다.
![[Fig. 14]](/xml/26131/JKROS-14-2-150_F14.jpg "[Fig. 14]")
Experimental setup for measurement of cable tension, and displacement
또한 레이저 거리 측정기를 사용하여 케이블의 길이 변화와 힘 계측기를 사용하여 장력 변화를 측정하여 강성계수를 검증하였다.
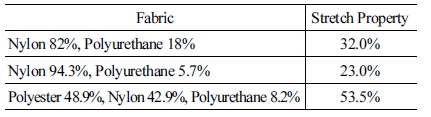
구체적인 사례로 발표된 원단의 특성값[10]을 사용하면 500 gf의 힘이 가하여졌을 때 각 원단의 신장률은 [Table 1]과 같다.

Fabric stretch [10]
Nylon 82%, Polyurethane 18%로 의복을 제작하고 가슴둘레 가 80 cm라면 신장률이 32%이므로 신장량은 이때의 25.6 cm 이다. 이를 원단의 강성계수, K로 변환하면
| (21) |
이며, 이것이 모터를 사용하여 구현해야 하는 강성계수값이 다. 이를 원하는 강성계수 값으로 설정하고 모터를 제어하며 길이와 힘을 여섯번 다른 경우에 대하여 측정한 결과를 [Fig. 15] 에 나타내었다. [Fig. 15]의 X값은 케이블 값은 아니며, 레이저 거리센서 끝단에서 힘 계측기가 고정된 바이스까지의 거리이 나 강성계수는 길이의 변화량에 대한 힘의 변화량이므로 측정 값들을 선형회귀분석을 통하여 구한 직선의 기울기가 강성계 수 값이고 그 결과는 19.28 N/m이다.
![[Fig. 15]](/xml/26131/JKROS-14-2-150_F15.jpg "[Fig. 15]")
.jpgfness measurements and estimated slope from linear regression: cable length vs. force
총 5개의 모터를 제어해야 하므로 햅틱 제어기와 모터들은 RS485통신 기반 daisy chain 방식을 사용하여 배선을 단순화 하 고, 확장성을 유지하였다. 또한 이 배선을 통하여 모터의 전원 을 공급한다. 매 10 msec 샘플링타임마다 햅틱 제어기는 모터 축의 현재 회전각 값을 받으며 순차적으로 각 모터의 명령값을 전달한다. 케이블의 굵기가 충분히 작고, 케이블이 풀리에서 모 두 풀렸을 때 햅틱 상의의 최대 사이즈로 설정하였으므로 실제 풀리에 케이블의 감김 정도에 따른 반지름 변화량은 무시하였다. [Fig. 16]의 제어기 구조와 같이 PC에서 사용자가 선정한 상의 사이즈 정보를 Cortex-M3를 사용한 햅틱 제어기로 블루투스 통 신으로 전송하며, 이를 바탕으로 햅틱 제어기는 진공부분의 케 이블 길이와 장력 제어, 레일상의 카트 위치 제어, 상체의 케이 블 길이와 장력을 제어한다.
![[Fig. 16]](/xml/26131/JKROS-14-2-150_F16.jpg "[Fig. 16]")
Distributed controller structure with task allocation and communication
가슴, 허리부분의 치수와 강성을 제어하는 제어기는 [Fig. 17] 과 같다. 옷의 기본 둘레 길이 Lo에 [Fig. 12]의 H값을 더한 것이 최종 둘레 L이다. 요구되는 케이블의 길이 C를 식 (19)로부터 구하여 이를 풀리의 반지름으로 나눈 θd를 추종하도록 비례제 어하며, 모터 토크 명령은 으로 주어지고 이때 비 례 상수값 Km은 식 (18)에 의하여 결정된다. 이 비례 상수값에 따라서 전체 옷의 신축성을 구현한다.
![[Fig. 17]](/xml/26131/JKROS-14-2-150_F17.jpg "[Fig. 17]")
Proportional controller for cable tension control
진공 부분의 제어는 전체 케이블의 길이가 옷의 진공 부분 둘레 길이이며 위치/강성 제어는 동일한 방법을 사용한다.
레일상의 카트 위치를 제어하는 모터는 비례/미분 제어방 식의 위치 제어방식을 사용한다. 예를 들어 [Fig. 5]의 벨트에 고정된 m1R, m1L 모터는 동시에 카트를 원하는 위치로 이동한 후, 이 위치에서의 가슴 둘레 사이즈 및 옷의 신축성에 따른 케 이블의 길이와 강성 값을 m2 모터의 제어기로 주어지며 레일 의 윗부분부터 아랫부분까지 이동하며 반복한다.
이 논문의 주제는 아니나, 증강현실 부분을 포함하는 최종 적인 시스템은 카메라를 이용하여 햅틱 상의 착용 이미지에 선정한 의상의 그래픽 이미지를 합성하여 이를 스탠드 형 사 이니지 모니터에 보여준다. 또한 착용감 확인을 위하여 팔 또 는 상체를 움직이면 이 움직임을 이미지로부터 추정하여 이에 해당하는 정보를 PC에서 햅틱 제어기로 전송한다. 이는 기존 의 증강현실 착용 시스템에서 원하는 옷을 입었을 때의 외모 만 확인 할 수 있는 기능에 더하여 실제 해당 옷을 입은 것과 같 은 착용감을 직접 느낄 수 있다는 것이 가장 큰 장점이다.
4. 결 론
본 논문에서는 이미지 결합을 통한 증강현실 기반의 가상 의복 피팅 시스템에 햅틱 기능을 부여하여 옷을 입은 모습뿐 만 아니라 옷의 사이즈 및 옷감의 탄성도를 느낄 수 있는 햅틱 상의에 대하여 기술하였다. 상의 의류의 주요 부분의 사이즈 를 느낄 수 있도록 케이블의 길이를 제어하고, 옷감의 탄성도 를 위하여 케이블의 장력을 제어하였으며 이를 시스템으로 구 현하였다. 케이블의 장력과 옷감 자체의 탄성도를 고려하는 모델을 수립하여 해석하였으며 모터 5개를 제어하는 제어 시 스템을 제작하였다. 이를 통하여 단순한 이미지 만으로 이루 어진 증강현실에 햅틱 피드백 기능을 추가하였다.
Acknowledgments
This work was supported by the Ministry of Education of the Republic of Korea and the National Research Foundation of Korea (NRF-2017S1A 5A2A03068271)
References
- A. Segura, “AR and VR in Fashion Retail,” The Fashion Retailer, [Online], https://fashionretail.blog/2018/05/07/ar-vr-in-fashion/, Accessed: April 29, 2019.
- “Augmented Reality is Said to Transform High End & Luxury Fashion Retail,” AVR POT, [Online], https://www.avrspot.com/augmentedreality-said-transform-fashion-retail/, Accessed: April 29, 2019.
- Ilyong Kang, “New World of Fashion Integrated with IT Technology,” N Content, Korea Creative Content Agency, vol. 9, pp.16-19, 2018.
- “FX Mirror, Firtual Fitting Solution,” Chosun Biz, [Online], http://biz.chosun.com/site/data/html_dir/2018/11/15/2018111501530.html, Accessed: April 29, 2019.
-
E. K. Yang and S. J. Kim, “3D Character Virtual Costume Making Software Usability Assessment – Focusing on Poser 3D Character virtual costume making -,” Journal of Digital Design, vol. 14, no. 1, pp. 863-876, Jan., 2014.
[https://doi.org/10.17280/jdd.2014.14.1.084]

-
S.-L. Han and M. An, “Analysis of User Telepresence and Behavioral Intention in Virtual Reality Shopping Environment,” Journal of Channel and Retailing, vol. 24, no. 1, pp. 51-71, Jan., 2019.
[https://doi.org/10.17657/jcr.2019.1.31.3]
- C. Lund, “Selling through the Senses: Sensory Appeals in the Fashion Retail Environment,” The Journal of Design, Creative Process & the Fashion Industry, vol. 7, no. 1, pp.9-30, May, 2015.
-
J. Saint-Aubert, S. Régnier, and S. Haliyo “Cable Driven Haptic Interface for Co-localized Desktop VR,” 2018 IEEE Haptics Symposium (HAPTICS), San Francisco, CA, USA, pp. 351-356, 2018.
[https://doi.org/10.1109/HAPTICS.2018.8357200]
- K. Dorfmuller-Ulhaas and D. Schmalstieg, “Finger Tracking for Interaction in Augmented Environments,” IEEE and ACM International Symposium on Augmented Reality, New York, NY, USA, pp.55-64, 2001.
-
Y. Jeong, “Fundamental Relationship between Reduction Rates of Stretch Fabrics and Clothing Pressure,” Korean Journal of Human Ecology, vol. 17, no. 5, pp.963-973, Oct., 2008.
[https://doi.org/10.5934/KJHE.2008.17.5.963]

1996 서울대학교 의류학과(학사)
1999 Parsons School of Design, 패션디자인(학사)
2002 서울대학교 의류학과(석사)
2006 서울대학교 의류학과(박사)
2002~2009 SADI(Samsung Art & Design Institute) 교수
2009~현재 성균관대학교 의상학과 교수
관심분야: 패션디자인, 복식미학

2008 한양여자대학교 영어과(학사)
2011 국가평생 교육진흥원 패션디자인과(학사)
2016 성균관대학교 의상학과(석사)
2017~현재 성균관대학교 의상학과 박사과정
관심분야: 패션디자인, 복식미학

1989 서울대학교 기계공학과(공학사)
1991 서울대학교 기계설계학과(공학석사)
1996 Massachusetts Institute of Technology, Mechanical Engineering (공학박사)
1996~1999 한국과학기술연구원, 선임연구원
2000~2003 Texas A&M University, Mechanical Engineering, Assistant Professor
2003~현재 홍익대학교, 기계시스템디자인 공학과, 교수
관심분야: Robotics