구호로봇용 연성 매니퓰레이터를 위한 조인트 제어 및 충돌감지 알고리즘

© Korea Robotics Society. All rights reserved.
Abstract
This paper deals with the development and application of control algorithms for series elastic relief robots for rescue operations in harsh environment like disasters or battlefield. The joint controller applied in this paper has a cascade structure combining inner loop for torque control and outer loop for position control. The torque loop contains feedforward and feedback controller and disturbance observer for independent, decentralized joint control. The effect of the elastic component and motor dynamics are treated as the nonlinear disturbance and compensated with the disturbance observer of torque controller. For the collision detection, Band Designed Disturbance Observer is configured to recognize/respond to external disturbance robustly in the continuously changing environment. The controller is applied to a 7-dof series elastic manipulator to evaluate the torque tracking and collision detection/response performance.
Keywords:
Series Elastic Actuator, Relief Robot, Collision Detection, Impedance Control1. 서 론
재난 환경 및 전장과 같은 가혹한 환경에서의 부상자 구조 는 인류의 오랜 관심사였다. 최근 로봇 기술의 발전에 따라, 접 근이 곤란한 지역에 있는 부상자를 구조 가능한 지역으로 이 동시킬 수 있는 로봇 시스템의 필요성이 대두되고 있다[1]. 이 러한 구호 로봇은 성공적인 임무 수행을 위해서 단순히 부상 자를 발견 및 이송할 뿐 아니라 부상자의 생존 시간을 연장하 고 후속 구조 작업에 필요한 정보를 수집하기 위해 부상자의 상태를 파악하고 적절한 응급 처치를 수행 할 수는 능력이 요 구된다[2].
상태 진단, 지혈, 산소 공급 및 근육 주사와 같은 대부분의 응급 처치 작업은 필연적으로 인간과 로봇의 접촉이 전제된다 는 특성을 가지고 있다. 또한 재난 환경은 상대적으로 잘 정리 되어 있는 일반적인 로봇의 작업 환경과 달리 사전에 예측하 기 어려운 장애물과의 접촉이 발생할 가능성이 높다는 특성을 가지고 있다. 이러한 배경에 의하여 재난 환경에서의 구호 작업 을 수행하는 로봇은 접촉으로 인한 로봇의 손상 및 부상자의 상 해를 막을 수 있는 적절한 하드웨어 및 제어 성능이 요구된다.
직렬 탄성 액추에이터(Series Elastic Actuator, 이하 SEA)는 출력부와 링크 구조체 사이에 연성체가 삽입된 형태의 액추에 이터이다[3]. SEA는 일반적인 로봇 액추에이터와 비교할 때 낮 은 강성을 가지며, 이에 따라 여러 가지 고유한 특성을 나타낸 다. 대표적으로, 조인트 연성에 의하여 높은 내충격성을 가지 고, 연성체의 비틀림을 측정함으로서 접촉력 제어에 필요한 조인트 토크 정보를 쉬게 얻을 수 있는, 구호 로봇의 관절 액추 에이터로 사용하기에 적합한 특성을 가지고 있다. 본 논문에 서는 직렬 탄성 액추에이터를 관절에 적용한 로봇을 구호 작 업 및 충돌 상황에서 운용할 때 필요한 조인트 임피던스 제어 및 충돌 감지 알고리즘의 개발 및 적용에 대해서 다룬다.
SEA는 연성이 클수록 관절의 고유 진동수가 낮아지기에 강성 액추에이터에 비하여 제어 입력에 대한 응답 속도가 느 린 특성이 존재한다. 이에 따라 경로 추종 성능이 악화되거나 제어 중 원하지 않은 진동이 발생하며, 이를 보완하기 위한 제 어 방법이 요구된다. SEA의 낮은 조인트 강성을 보완하는 대 표적인 방법으로는 연성 매니퓰레이터의 동역학 모델을 조인 트 제어기의 출력 결정에 사용하는 방법이 존재한다[4,5]. 그러 나 완전한 비선형 모델을 산출하기 어렵다는 한계점과 더불어 비선형 모델의 계산에 많은 연산량이 소요되는 단점이 존재한 다. 이러한 단점을 극복하기 위하여 [6]에서는 분산형 제어 (Decentralized Control)를 연성 매니퓰레이터 제어에 적용하 고 있다. 해당 제어 프레임워크에서는 조인트 연성의 영향을 조인트에 작용하는 외란으로 간주하고 상위 모션 제어기에서 는 매니퓰레이터 강체 모델에 기반한 조인트 커맨드 토크를 생성한다. 이때 각 조인트의 하위 제어기에서는 마찰/조인트 연성 등과 같은 모델링되지 않은 조인트 구성 요소들의 영향 을 한 덩어리의 외란으로 보고, 이들의 영향을 제거하여 커맨 드 토크 추종 성능을 향상시키는 제어를 수행한다. 분산형 제 어 시스템은 전자에 비하여 커맨드 토크 생성을 위한 모델링 이 간단하며, 상대적으로 적은 연산량이 요구되는 장점이 존 재한다. 본 논문에서는 외란 관측기(Disturbance Observer, DOB)를 이용한 조인트 토크 제어기를 적용하여 분산형 제어 를 구현하였다.
SEA는 연성체 비틀림으로부터 조인트 토크 정보를 쉽게 얻을 수 있다. 이는 충돌외란의 감지에 매우 유리한 조건으로, 액추에이터 입력 전류에 기반한 충돌 감지([7])에 비하여 정 확한 조인트 토크를 이용할 수 있다는 장점이 있다. 그러나 [1], [2]에서 개발된 구호 로봇과 같은 운용 조건에서는 지면 및 작업툴의 변경 등 사전에 모델링하기 어려운 시스템 모델 의 변화가 존재한다. 이러한 문제를 해결하기 위한 방법으로, DOB 구성에 사용되는 Q 필터를 적절히 설계하여 관심있는 주파수의 외란만을 추정하는 대역 외란 관측기(Bnad designed DOB, BdDOB)가 존재한다[8]. 본 논문에서는 BdDOB를 충돌 감지에 적용하여 모델링 오차에 강인한 충돌 감지를 구현하 였다.
이후 논문의 구성은 다음과 같다. 2장의 1절에서는 조인트 임피던스 및 토크 제어기의 구조에 대해서 다루고, 2장의 2절 에서는 충돌 감지를 위한 Band Designed DOB에 대하여 다룬 다. 3장의 1절에서는 이들을 3축 SEA 매니퓰레이터에 적용한 실험 및 결과를, 2절에서는 7축 SEA 매니퓰레이터에 적용한 실험 및 결과를 다룬다. 4장에서는 결론 및 차후의 연구 방향 에 대하여 소개한다.
2. 조인트 제어 및 충돌감지 알고리즘
2.1 조인트 제어기 구성
본 논문에서 사용된 매니퓰레이터용 연성 관절 모듈은 [Fig. 1] 과 같으며, 모터의 위치 출력과 링크의 위치 출력을 센싱하여 연성체의 비틀림을 측정한다. 측정된 연성체의 비틀림은 사전 에 측정된 연성체의 강성을 이용하여 조인트 토크로 변환되어 제어에 사용된다. 사용된 엔코더는 21bit(링크), 19bit(모터)의 해상도를 가진다.

Structure of Series Elastic Actuator Module
본 논문에서 사용된 조인트 제어기는 크게 조인트 위치와 속도를 기반으로 토크 명령을 생성하는 outer loop와 임피던스 제어기와 outer loop에서 생성된 조인트 토크 명령을 추종할 수 있는 전류 명령을 생성하는 inner loop로 구성된다. 이러한 dual loop 제어기 구조는 [Fig. 2] 와 같은 schematic을 가진다.

Schematic of joint controller. (a) Impedance Controller, (b) Torque Controller
Dual loop 형태의 조인트 제어기 중 [Fig. 2 (a)]에 묘사된 outer loop는 임피던스 제어기 형태를 가진다. 조인트 토크 커 맨드는 임피던스 게인인 와 , 조인트 위치 와 조인트 속도 ω으로부터 생성된다. 구체적으로 조인트 임피던스 제어 기는 (1)과 같이 나타낼 수 있다.
| (1) |
변수 , 와 , 그리고 는 각각 목표 위치, 강성, 감쇠 및 조인트 위치에 의해 계산된 중력 보상 토크를 나타낸다.
이때, 조인트 마찰, 연성체의 영향 등 토크 출력에 영향을 미 치는 요소들을 통합된 외란으로 간주하고 외란 관측기 기반으 로 설계된 조인트 토크 제어기를 통해 조인트 거동에 대한 영 향을 최소화한다.
Dual loop 형태의 조인트 제어기 중 토크 제어기인 inner loop 는 [Fig. 2 (b)]와 같은 구조를 가진다. 토크 제어기는 액추 에이터의 토크 모델에 기반한 피드포워드 제어기와 연성체 변 형으로부터 얻는 토크 센싱값을 이용하는 PID 제어기 형태의 피드백 제어기, 토크에 영향을 미치는 기타 외란을 제거하기 위하여 DOB 형태의 제어기의 조합으로 이루어진다.
토크 제어를 위한 조인트 토크 는 (2)와 같은 토크 연산을 통하여 이루어진다. 은 실험적으로 얻어진 조인트 연성 체의 탄성 모델이며, 은 연성체의 비틀림 량, 와 는 각각 현 재 감속기 출력단과 링크의 위치를 의미한다.
| (2) |
피드포워드 제어기는 구동기가 입력 토크에 해당하는 정상 상태 토크를 출력할 수 있는 전류 명령을 생성하는 것이 주된 목적이다. 구체적으로 피드포워드 제어기는 구동기 모터의 토 크 모델을 이용하여 를 출력할 수 있는 전류 커맨드인 를 생성한다. 이는 (3)과 같이 나타낼 수 있으며, 이때 는 모 터의 토크 상수, 는 조인트의 효율, 은 조인트의 감속비를 나타낸다.
| (3) |
피드백 제어기는 피드포워드 제어기만으로는 부족한 토크 출력의 과도 응답 성능을 개선하기 위하여 사용되었다. 피드 백 제어기는 토크 에러를 입력으로 가지며, 출력 는 (4)와 같 이 일반적인 PID 제어기 형태로 묘사할 수 있다.
| (4) |
이때, , , 는 토크 제어기의 비례, 미분, 적분 게인 을 의미하며, a와 b는 제어기 입력에 대한 민감도를 조절하기 위하여 선택되는 상수이다.
피드포워드와 피드백 제어기의 입력으로 사용되는 토크 입 력 는 임피던스 제어기로부터 생성된 토크 명령인 와 DOB를 통해 추정된 외란 을 이용하여 생성된다. 이는 (5)와 같이 표현할 수 있다.
| (5) |
본 논문에 사용된, DOB 를 통해 추정된 외란 은 (6)과 같 이 나타낼 수 있다.
| (6) |
식 (6)에서 는 액추에이터의 토크 생성 역모델, 는 DOB의 Q 필터이다[6,9,10]. 본 논문에서 연성 관절 제어 에 적용된 Q 필터는 (7)과 같이 2차 시스템의 형태를 가진다.
| (7) |
이러한 DOB를 이용한 연성 조인트의 토크 보상 제어기는 [9], [10]과 같은 연구에서 점근적 안정성을 가짐이 확인되었다.
2.2 충돌 감지 알고리즘 구성
구호 로봇의 운용 중에는 다양한 엔드 이팩터와 작업 대상 물, 통제되지 못한 지형 등의 영향에 의하여 발생한 외란이 작 용한다. 이들은 매니퓰레이터의 동역학 모델에서 고려되지 못 하는 요소이기에 외란 관측기([7]) 등을 이용한 외란 추정에 있 어서 모델링되지 못한 외란 성분으로 작용한다. 이러한 모델 링되지 못한 외란 성분들은 실제 충돌이 없는 상황에서도 외 란 추정값의 오류에 의한 잘못된 충돌 감지(False alarm)를 발 생시키는 원인이 된다.
이러한 문제를 해결할 수 있는 방법으로 BdDOB (Band Designed DOB) 가 존재한다[8]. BdDOB는 외란 관측기의 Q 필 터를 적절한 컷오프 주파수를 가지도록 설계한 형태의 DOB 로서, 충돌에 해당하는 주파수를 가지는 외란만을 출력하는 특성을 가지고 있다.
본 논문에서는 충돌감지를 위하여 (8)과 같은 밴드 패스 필 터 형태의 Q 필터, 를 적용하였다. 이때 충돌감지를 위한 BdDOB는 토크 제어기의 DOB와 독립적으로 적용되었다.
| (8) |
컷오프 주파수 설계에 있어서 동역학 모델의 질량 오차 및 구호로봇 베이스에 가해지는 중력 가속도 방향의 변화를 반영 하였다. 구호 로봇이 경사면에 위치한 상황을 가정하고, 매니 퓰레이터 구동 시 이동하지 않는다면, 중력 가속도 방향의 오 차는 존재하지만, 시간에 대한 변화는 없는 것으로 가정할 수 있다. 이때 모델링되지 않은 외란의 주파수 바운더리는 매니 퓰레이터의 자유도와 조인트 속도에 의하여 결정된다. 이러한 주파수 영역 결정 방법은 [8]에 의하여 [Table 1]과 같이 나타 낼 수 있다. 이때 는 매니퓰레이터를 구성하는 조인트 중 가장 빠른 속도를 가지는 조인트의 속도 절대값을 의미한다.

Maximum Frequency Boundary of Estimation Error Caused by Modeling Error
3. 시스템 적용 및 실험
3.1 7-dof 연성 매니퓰레이터
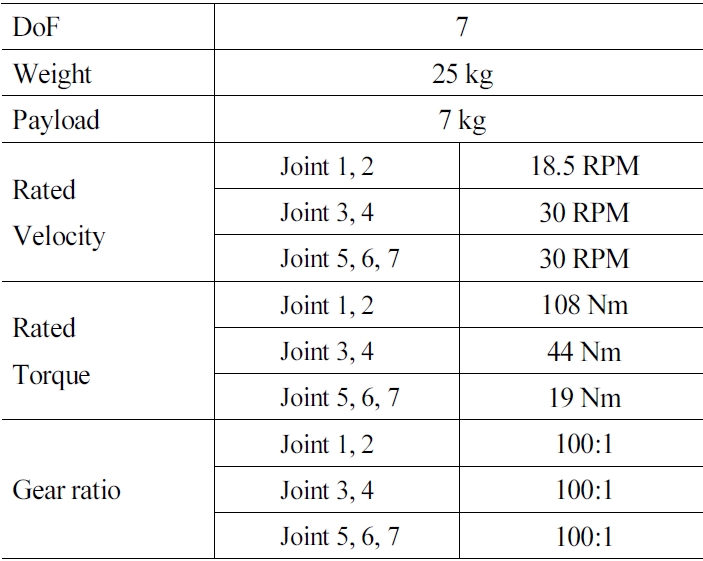
본 논문에서는 7자유도 연성 매니퓰레이터에서의 토크 추 종 및 충돌 감지 성능 평가를 통해 적용된 알고리즘을 검증하 였다. 실험에 사용된 7자유도 연성 매니퓰레이터는 [Fig. 3]에 나타나 있으며, 전체적인 사양은 [Table 2]와 같다.

Series elastic manipulator used for the experiment
Specification of 7-dof Manipulator
토크 추종 성능 실험은 매니퓰레이터를 이용한 직접 교시 상황에서, 각 조인트의 토크 커맨드 추종 성능을 평가하였다. 실험의 비교군으로는 피드백 제어와 DOB가 적용되지 않은 상태의 피드포워드 제어기만을 적용한 상태의 성능을 측정하 였다. 구체적으로, 토크 명령은 매니퓰레이터의 자세에 따라 중력 모델에 의한 중력 보상 토크를 사용하였고, 매니퓰레이터 에 외력을 가해 변경되는 자세에 따른 중력 보상 토크에 대한 센싱 토크의 오차 및 안정화 시간(Settling Time)을 측정하였다.
피드포워드 제어기만을 적용한 실험 결과는 [Fig. 4]과 같 다. 실험 결과, 토크 명령에 대한 추종 토크는 평균적으로 3 Nm 의 정상 상태 오차 및 3.5 s의 안정화 시간이 측정되었다. 반면, 피드포워드/피드백 제어기 및 토크 DOB를 적용한 실험 결과는 [Fig. 5]와 같다. 실험 결과 토크 명령에 대한 추종 토크 는 평균적으로 0.5 Nm 이하의 정상 상태 오차 및 2 s의 안정화 시간이 측정되었다.

Torque following experiment without feedback and DOB controller

Torque following experiment with feedback and DOB controller
결과적으로, DOB와 피드백 제어기를 이용하여 토크 추종 오차 및 조인트 연성에 의한 진동을 억제할 수 있음을 확인하 였다. 또한, 조인트 마찰 및 댐핑 등 비선형 요소들의 영향이 DOB에 의하여 상쇄되기에, 피드포워드 제어기만을 사용하였 을 때에 비하여 직접 교시에 필요한 외력 토크가 감소하는 것 이 확인되었다.
충돌 감지 및 대응 성능은 [Fig. 6]와 같이 매니퓰레이터가 일정 경로를 반복해서 왕복하는 매니퓰레이터와 인체가 부딪 혔을 경우에서 평가되었다. 매니퓰레이터의 외란 감지에 사용 되는 동역학 모델은 모델링 오차를 가지는 상황을 모사하기 위하여 실제 매니퓰레이터 질량에 비하여 30% 가량의 오차를 가지도록 설정되었다. 충돌 대응에는 연성 매니퓰레이터는 충 돌 감지 시 정지하여 추가적인 접촉력 전달을 차단한 뒤, 작업 자의 이탈 뒤 모션을 재개하는 방법이 사용되었다. 실험의 대 조군으로는 오류를 가진 모델을 사용한 전통적인 외란 관측기 출력이 사용되었으며, 모델링 오차에 의한 외란 추정값의 오 차량을 비교하였다.

Collision detection experiment
실험 결과는 [Fig. 7]과 같다. 충돌은 5.995 s에 발생하였으 며, 매니퓰레이터는 충돌을 인식하고 정지하여 작업자 이탈이 진행되는 5.995~10.11 sec 사이에는 추가적인 외란 입력이 없 음을 확인할 수 있다. 이후 10.11~17.5 sec 에서는 작업자 이탈 후 매니퓰레이터 모션에 의한 노이즈 및 외란 측정 오차 등이 확인된다. 실험 결과, 전통적인 DOB데이터의 경우, 모델링 오 차의 영향에 의하여 최대 17.5 Nm 가량의 외란 추정 오차가 발 생한다. 이와 달리 BdDOB 데이터의 경우, 모델링 오차의 영 향이 제거되어 외란 추정의 오차는 1.5 Nm 내외로 90% 이상 줄어듦을 확인할 수 있다. 결과적으로 구호작업용 연성 매니 퓰레이터와 같이 다양한 충돌외란 및 모델링의 오차가 수반되 는 작업 환경에서, 기존의 DOB만으로는 False alarm 방지를 위한 Threshold 범위 증대에 따른 민감도 저하가 예상되는 반 면, BdDOB를 적용할 경우 모델 오차에 강인하게 충돌을 감지 할 수 있음을 알 수 있다.

Result of collision detection experiment
4. 결 론
본 논문에서는 연성 관절 매니퓰레이터의 운용을 위한 임 피던스 제어와 충돌 감지 성능을 가지는 제어기를 개발 및 적 용하였다. 연성 관절의 임피던스 제어를 위해서는 DOB 기반 의 제어기를 적용하여 관절 연성체 및 조인트 마찰의 영향을 보상하였고 BdDOB를 이용한 충돌 감지 알고리즘을 적용하 였다. 실험 결과, 토크 추종의 응답 속도 증가 및 안정화 시간, 모델링 오차에 의한 외란 추정값 오차의 감소를 확인하였다. 차후에, 본 논문에 사용된, DOB에서 확장된 두 알고리즘을 일 원화시키는 방안에 관한 연구를 진행하고자 한다.
사 사
본 연구는 민군겸용기술사업으로 수행중인 “구호작업을 위한 안전보장형 연성 매니퓰레이터 및 다기능 가젯 기술 개 발” 과제의 일환으로 수행되었음(15-CM-RB-09).
Acknowledgments
This project was funded by Korea Robotics Society (KROS), and is currently supported by the publication grant
References
-
H. Kim, D. Park, T. Choi, H. Do, D. Kim, J. Kyung, and C. Park, “Design of High Payload Dual Arm Robot with Replaceable Forearm Module for Multiple Tasks: Human Rescue and Object Handling,” Journal of Korea Robotics Society, vol. 12, no. 8, pp. 441-447, 2017.
[https://doi.org/10.7746/jkros.2017.12.4.441]

-
S. Hong, Y. Lee, K. H. Park, W. S. Lee, O. Sim, and J.-H. Oh, “Development of an Experimental Humanoid Robot and Dynamics Based Motion Optimization for Rescue Missions,” Journal of Institute of Control Robotics and Systems, vol. 21, no. 8, pp. 753-757, 2015.
[https://doi.org/10.5302/J.ICROS.2015.15.0090]
- G. A. Pratt and M. M. Williamson, “Series Elastic Actuators,” 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, pp. 399-406, 1995.
-
M. W. Spong, “Modeling and control of elastic joint robots,” Journal of Dynamic Systems, Measurement, and Control, vol. 109, no. 4, pp. 310-318, 1987.
[https://doi.org/10.1115/1.3143860]
- Z. Li, N. G. Tsagarakis, and D. G. Caldwell, “A passivity based admittance control for stabilizing the compliant humanoid COMAN,” 2012 12th IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, pp. 43-49, 2012.
-
N. Paine, J. S. Mehling, J. Holley, N. A. Radford, G. Johnson, C.-L. Fok, and L. Sentis, “Actuator Control for the NASA‐JSC Valkyrie Humanoid Robot: A Decoupled Dynamics Approach for Torque Control of Series Elastic Robots,” Journal of Field Robotics, vol. 32, no. 3 pp. 378-396, May, 2015.
[https://doi.org/10.1002/rob.21556]
- S. Takakura, T. Murakami, and K. Ohnishi, “An approach to collision detection and recovery motion in industrial robot,” 15th Annual Conference of IEEE Industrial Electronics Society, Philadelphia, PA, USA, 1989, doi: 10.1109/IECON. 1989.69669.
-
B.-J. Jung, J. C. Koo, H. R. Choi, and H. Moon, “Human-robot collision detection under modeling uncertainty using frequency boundary of manipulator dynamics,” Journal of Mechanical Science and Technology, vol. 28, no. 11, pp. 4389-4395, 2014.
[https://doi.org/10.1007/s12206-014-1006-5]
-
N. Paine, S. Oh, and L. Sentis. “Design and control considerations for high-performance series elastic actuators,” IEEE/ASME Transactions on Mechatronics, vol. 19, no. 3, pp. 1080-1091, June, 2014.
[https://doi.org/10.1109/TMECH.2013.2270435]
-
K. Kong, J. Bae, and M. Tomizuka. “A compact rotary series elastic actuator for human assistive systems,” IEEE/ASME Transactions on Mechatronics, vol. 17, no. 2, pp. 288-297, April, 2012.
[https://doi.org/10.1109/TMECH.2010.2100046]

2011 성균관대학교 기계공학과(공학사)
2017 성균관대학교 기계공학과(공학박사)
2017~현재 전자부품연구원 선임연구원
관심분야: 연성 매니퓰레이터 제어, pHRI (Physical Human Robot Interaction), 소프트 로봇 제어, 환경인식 센서

2010 고려대학교 기계공학과(공학사)
2012 고려대학교 기계공학과(공학석사)
2012~현재 전자부품연구원 선임연구원
관심분야: 연성 매니퓰레이터, 로봇 액추에이터 모듈, 센서

2010 한국산업기술대학교 메카트로닉스공학과 (공학사)
2012 한양대학교 전자시스템공학과(공학 석사)
2010~현재 전자부품연구원 전임연구원
관심분야: 관심분야: 매니퓰레이터 제어, 바이오-의료 로봇, 햅틱스, 로봇 시뮬레이션

2012 경기대학교 전자공학과(공학사)
2014 경기대학교 전자공학과(공학석사)
2014~현재 전자부품연구원 재직중
관심분야: 연성 매니퓰레이터, 제어, 인공지능

1997 연세대학교 기계공학과(공학사)
1999 KAIST 기계공학과(공학석사)
2007 KAIST 기계공학과(공학박사)
2007~현재 전자부품연구원 책임연구원
관심분야: 연성관절모듈, 인공지능조작, 인간-로봇 상호작용