구호로봇을 위한 응급처치용 가젯 시제품의 기능 테스트 방안
 ; Ikho Lee2 ; Taesang Park3 ; Choongpyo Jeong4 ; Hyeonjung Kim5 ; Jinung An1, † ; Seonghun Lee† ; Dongwon Yun†
; Ikho Lee2 ; Taesang Park3 ; Choongpyo Jeong4 ; Hyeonjung Kim5 ; Jinung An1, † ; Seonghun Lee† ; Dongwon Yun†
© Korea Robotics Society. All rights reserved.
Abstract
This paper proposes functional test methods of first-aid gadgets which are special end-effectors, for relief robot. In recent years, researches have been actively conducted on robots that can perform rescue operations on behalf of rescue workers in dangerous areas such as disasters and wars. These special robots mainly perform the task of finding or transporting injured people. However, it is sometimes they necessary to provide first aid in the field. Among the various first-aid operations, gadgets are being developed for oxygen supply, injection, and hemostasis operations that can be used in a defense/civilian area by using robot technology. Previous studies have proposed first-aid gadgets that are suitable for onsite situations and enable robots to perform the given task quickly and accurately. In this paper, we design a test procedure suitable for the functions of first-aid gadgets, summarize the results, and introduce future research directions.
Keywords:
First-aid gadget, End-effector, Functional test1. 서 론
전쟁 지역이나 재해재난 지역에서 부상자가 발생시, 안전 성, 지형 제약 등의 문제로 구조 요원의 진입이 어려울 수 있다. 특히 전시 상황인 경우, 의무 요원이 부상자의 상태를 확인하 고 응급조치 후 환자 이송 역할까지 담당하여, 부상자에 대한 적절한 조치가 원활하지 않고, 의무 요원이 환자 치료나 이송 도중에 항상 위험에 노출되는 상황이 발생된다. 이 경우 구조 요원을 대신하여 부상자의 신체 상태를 파악하고 구조할 수 있 는 구조/구난 기능을 갖는 로봇에 대한 연구가 활발히 진행되 고 있다[1-3]. 한편, 로봇이 구조/구난의 임무를 수행하기 전에 부상자에 대한 응급처치 등의 구호 작업이 필요할 수도 있다. 이 경우 구조 요원을 대신하여 응급처치를 신속하고 정확하게 실행하기 위해서는 응급처치 전용 가젯이 필요하다. 지금까지 재난 대응 로봇 분야에서는 주로 부상자 발견, 장애물 회피, 장 애물 제거, 부상자 후송에 초점이 맞추어져 있으며, 로봇을 이 용한 부상자 응급처치에 대한 연구는 다소 부진한 상황이다[4-7].
구호 작업 시 부상자의 상태에 따라 필요한 응급처치는 심 폐소생, 지혈, 주사 등 아주 다양하다. 이들 중, 로봇 기술을 이 용하여 국방/민간분야에서 공용으로 사용할 수 있는 산소공 급, 주사, 지혈 응급처치 작업에 대한 가젯 개발이 진행되고 있 다[8]. 응급처치용 가젯 들은 툴매거진에 거치되어있으며, 원격 지의 구호자가 로봇 매니퓰레이터를 제어하여 구호 작업별 적 합한 가젯으로 구호 작업을 수행한다. 구호 작업 중 주위 사람 과 충돌 위험을 최소화하기 위해 연성 매니퓰레이터를 사용하 므로, 이로 인해 가젯의 중량이나 장착/분리에 필요한 힘 등 가 젯 설계 제약이 따르고, 가젯별 특수한 기구 구조를 가진다[9].
본 논문에서는 가젯 시제품들에 대한 개발 내용을 소개하 고, 각 가젯 들이 정상적으로 동작하는 지, 기능 테스트에 대한 환경 및 절차 그리고 테스트 결과에 대해 기술 한다.
2. 응급처치용 로봇 가젯 시제품 개요
로봇 가젯으로 수행가능한 대표적인 응급처치 종류는 전문 가의 자문회의를 통해 우선적으로 주사, 산소공급, 지혈 작업 으로 선정하였다. [Fig. 1]에 보이는 응급처치용 구호 로봇은 전용 거치대에 보관된 가젯을 이용하여, 원격지에 있는 구호 요원의 원격 제어에 의해 화상 및 로봇 정보를 바탕으로 다양 한 응급처치를 수행할 수 있다. 본 논문에서는 전쟁 지역이나 재난 지역에서, 부상자의 상태는 의식이 있고, 누워 있으며, 격 렬한 움직임은 없이 통제가 가능한 상태이며, 온도는 0°~35°C, 상대습도는 5%~95%(결로 없음) 수준의 외부 환경 조건으로 가정을 하였다. 이를 바탕으로 제작한 주사, 산소공급, 지혈 가 젯의 시제품은 다음과 같다[7].

Concept of relief robot for first-aid
2.1 주사 가젯
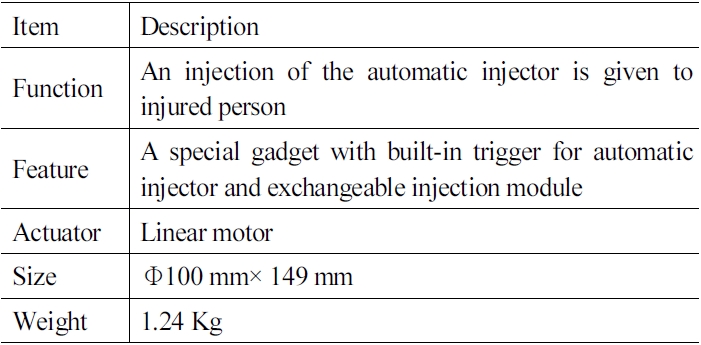
주사 가젯은 [Fig. 2]처럼 다양한 주사제 또는 같은 주사제를 여러 번 반복 주사가 가능하도록 주사 제어 모듈과 주사 모듈 로 구성하였다. 주사 가젯의 사양은 [Table 1]과 같다. 주사 제 어 모듈은 로봇 매니퓰레이터 말단과 결합되어 주사기 제어, 상태 파악, 고장 진단 등의 기능을 맡는다. 이를 위해 선형 모터, 제어기, 센서, CAN 통신 모듈 등으로 구성되어 있다. 주사 모 듈은 자동주사기와 접촉센서를 구성하고 있으며, 자동주사기 에 들어있는 주사액에 따라 다양한 주사를 여러 번 놓을 수 있 도록 설계 하였다. Φ100 mm× 149 mm 크기와 약 1.2 ㎏ 중량을 가지며, 최대 50 N의 트리거 힘을 발생시켜 주사를 놓을 수 있다.

Injection gadget: injection control module (upper device; gray) and injection module (lower device; blue)

Specification of injection gadget
주사 가젯의 운용은 [Fig. 3]에 나타나 있다. 원격지의 구호자 가 원격영상정보를 보고 원격 제어기의 조종기를 이용해서 로 봇의 매니퓰레이터를 주사 가젯이 보관되어 있는 툴 매거진으 로 이동한다. 그리고 먼저 매니퓰레이터와 주사 제어 모듈을 결 합한 후, 다음 주사 제어 모듈과 주사 모듈을 결합하여 주사를 놓는다. 주사 완료 후 빈 주사 모듈을 툴매거진에서 분리하고, 필요시 새 주사 모듈을 결합하여 주사를 다시 놓는다. 주사를 완전히 종료하면, 툴매거진에서 빈 주사 모듈과 주사 제어 모듈 을 분리한다. 이 모든 과정에서 주사 제어 상태, 명령, 고장 진단 정보 등은 원격 제어기에서 실시간으로 모니터링 되고 제어 된다.

Operation scenario for injection gadget
2.2 산소공급 가젯
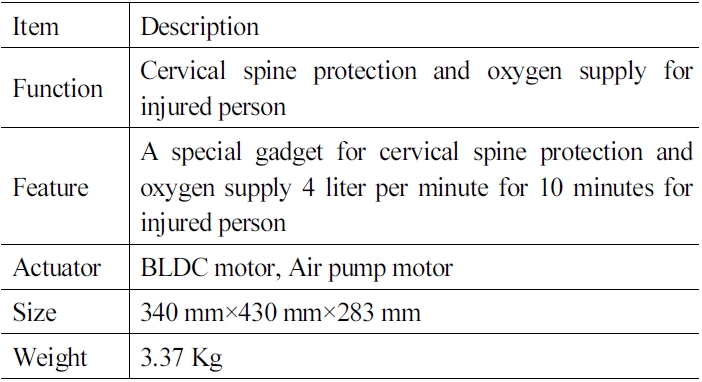
산소공급 가젯은 [Fig. 4]처럼 산소공급을 하면서 경추보호 를 동시에 수행할 수 있다. 산소공급 가젯의 사양은 [Table 2] 와 같다. 경추부위는 경추 보호가드, 죠(Jaw), 에어 커프(Air cuff)로 고정 하며, 마스크를 통해 적정량의 산소를 공급할 수 있도록 제작 하였다. 산소통은 필요에 따라 최대 2대까지 장착 할 수 있다. 죠는 최대 200 mm 까지 개방이 가능하며, 장착 중에 다시 죠의 변위를 조절할 수 있다. 가젯은 340 mm×430 mm×283 mm 크기와 약 3.3 ㎏ 중량을 가지며, 최대 10분 동안 4 ℓ의 산 소를 공급할 수 있다.

Oxygenation gadget: oxygenation gadget control module, 2-jaws with air cuff, and cervical collar
Specification of oxygenation gadget
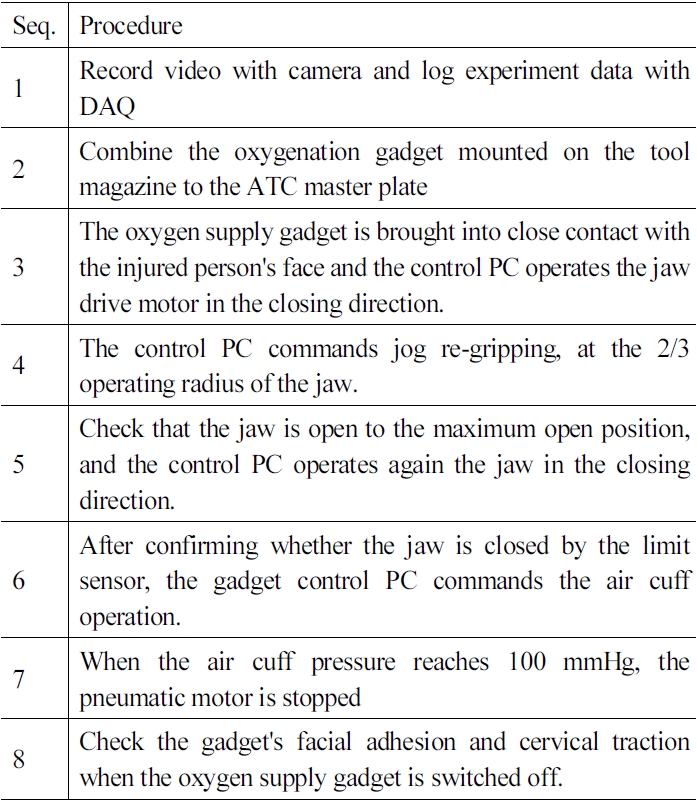
산소공급 가젯의 운용은 [Fig. 5]에 나타나 있다. 원격 조정 을 통해 산소공급 가젯이 보관되어 있는 툴 매거진으로 이동 한다. 그리고 매니퓰레이터와 산소공급 가젯을 결합한 후, 부 상자의 얼굴 근처로 이동한 다음, 마스크를 얼굴에 밀착시키 고, 죠를 구동시켜 리미트 센서가 닫힘 상태로 될 때까지 경추 부위를 1차적으로 장착한다. 다음 공압 모터를 이용해 에어 커 프를 팽창시켜 경추가 견고하게 고정될 수 있도록 한다. 이후 산소조절밸브를 열어 부상자에게 적당량의 산소를 공급시킨 다. 산소공급 완료 후 가젯은 수동으로 부상자에게서 분리할 수 있다. 이 모든 과정에서 산소공급 제어 상태, 명령, 고장 진단 정 보 등은 원격 제어기에서 실시간으로 모니터링 되고 제어 된다.

Operation scenario for oxygenation gadget
2.3 지혈 가젯
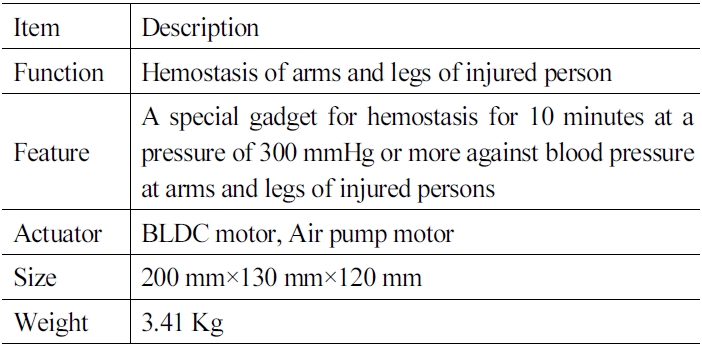
지혈 가젯은 [Fig. 6]처럼 부상자의 팔다리에 출혈이 발생 시 사용하는 간접지혈 방식의 지혈대 형식으로 제작 하였다. 지혈 가젯의 사양은 [Table 3]과 같다. 1차적으로 지혈 가젯 죠 를 이용하여 출혈부위보다 심장 가까운 쪽 부위로 압박을 한 후, 죠 내부에 장착된 에어 커프로 2차 압박으로 지혈 작업을 완료한다. 지혈 작업 완료 후, 전원을 차단해 1시간 이상 지혈 압력을 유지할 수 있으며, 타이머로 지혈 시간을 표시할 수 있 다. 죠는 성인남성 표준체형 데이터(상박)를 고려하여 최대 200 mm 까지 개방이 가능하다. 가젯은 200 mm×130 mm×120 mm 크기와 약 3.4 ㎏ 중량을 가지며, 최대 712 mmHg (95㎪)의 공 압을 생성하여 지혈을 수행한다.

Tourniquet gadget: tourniquet gadget control module and 2 jaws with air cuff
Specification of tourniquet gadget
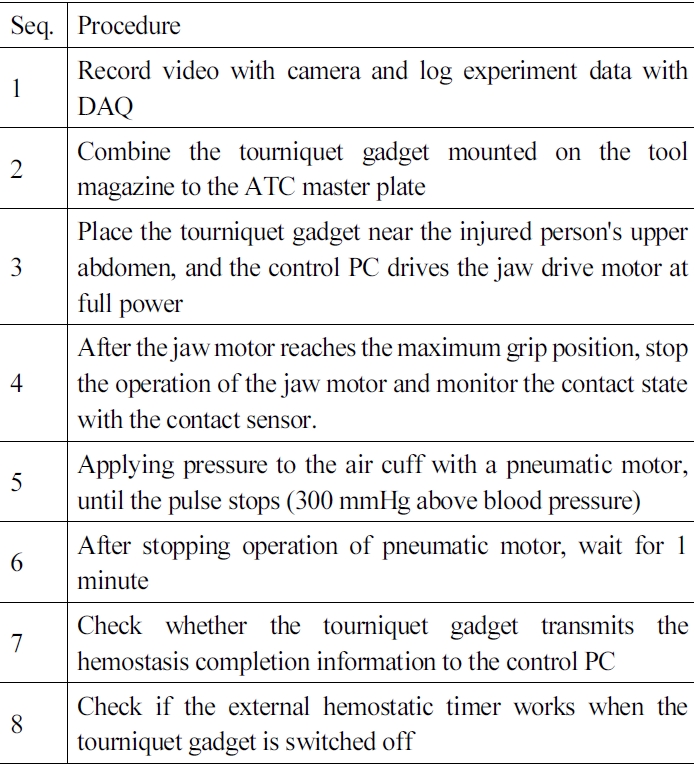
지혈 가젯의 운용은 [Fig. 7]에 나타나 있다. 원격 조정을 통 해 지혈 가젯이 보관되어 있는 툴 매거진으로 이동한다. 그리 고 매니퓰레이터와 지혈 가젯을 결합한 후, 부상자의 출혈부 근처로 이동한 다음, 가젯을 환부에 밀착시키고, 죠를 구동시 켜 리미트 센서가 닫힘 상태로 될 때까지 1차적으로 장착한다. 다음 공압 모터를 이용해 에어 커프를 팽창시켜 지혈 가젯이 혈압대비 300 mmHg 이상 압력을 출력할 때까지 모터출력을 유지 한다. 적절한 압력이 출력되면, 지혈 가젯을 매니퓰레이 터에서 분리한 후, 지혈 시간이 자동으로 출력 되는지 확인한 다. 이 모든 과정에서 지혈 제어 상태, 명령, 고장 진단 정보 등 은 원격 제어기에서 실시간으로 모니터링 되고 제어된다.

Operation scenario for tourniquet gadget
3. 가젯 시제품 기능 테스트 방안
각 가젯 들의 시제품 제작 완료 후, 사용자 및 시스템 요구사 항을 기준으로 제대로 제작되었는지 검증이 필요하며, 가젯 들의 다양한 기능들을 확인하기 위해 가젯별 테스트 절차 및 테스트 환경이 필요하다. 본 논문에서는 전문가 자문회의를 통해 정의한 사용자 및 시스템 요구사항과 국군의무학교 기본 교재(간호업무, 응급처치)의 내용을 바탕으로 각 가젯에 대한 기능 테스트 방안을 다음과 같이 제안한다.
3.1 주사 가젯 시험
부상자에게 여러 번의 근육 주사를 놓을 수 있는 주사 가젯 의 기능을 확인한다.
시험 구성은 [Fig. 8]과 같이 주사 가젯 제어 PC, 주사 가젯 의 상태 데이터를 분석/기록할 모니터링 PC, 데이터 기록 장치 (DAQ),주사 실습모형으로 구성된다.

Test configuration of injection gadget
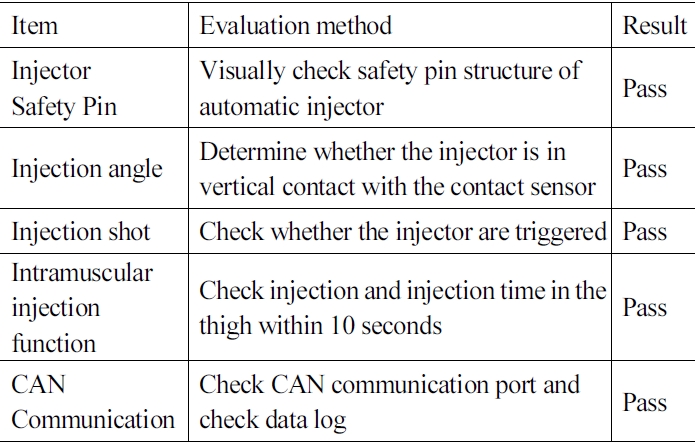
주사 가젯의 기능중 주요 시험 항목은 다음과 같이 4개로 구 성된다.
- ․ 자동주사기는 보관 시 안전핀의 기능 동작 확인
- 대퇴부에 주사 가젯 접촉 센서를 이용해 접촉 여부 판별 기능 확인
- ․ 주사 가젯은 약물의 종류에 따라 3~5 cc용량을 10초 이내 에 자동으로 주사 가능 확인
- ․ CAN 통신 동작성 확인
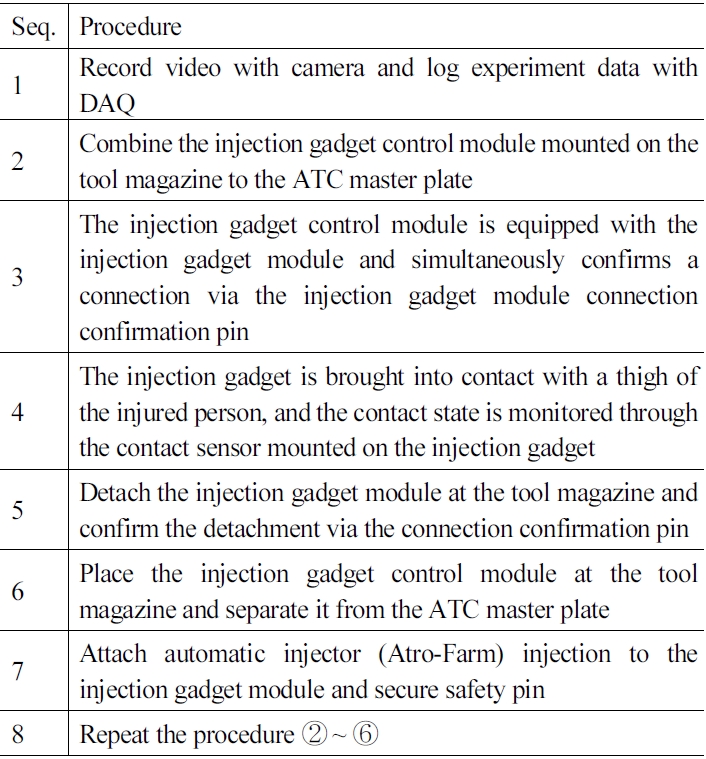
주사 가젯의 주요 기능에 대한 시험 절차는 [Table 4]와 같 이 8단계의 순서로 구성된다.
Test procedure of injection gadget
주사 가젯과 제어PC간에 주고받은 CAN 데이터 결과는 [Fig. 9], [Fig. 10]과 같다. [Fig. 9]는 주사 가젯을 부상자 주사 부위에 주사 시 발생되는 명령의 CAN 데이터 그래프를 나타 낸 결과이다. IGC_CTRL_ CONNECT 는 주사 가젯 제어 모듈 탈착(0). 장착(1)을 나타내고, IG_CTRL_INJECTION 는 주사 제 비사용(0), 투여(1)를 나타낸다. 주사 가젯 제어 모듈은 약 23초부터 장착명령이 시작되고, 약 42초에서 주사명령이 일 어났음 볼 수 있다.

Control signals of injection gadget (CAN message)

State signals of injection gadget (CAN message)
[Fig. 10]에서 IGC_FDBCK_CONNECT는 주사 가젯 제어 모듈 연결 안 됨(0), 연결 중(1), 분리 중(2), 연결 됨(3) 상태를 나타낸다. IG_FDBCK_CONNECT 는 주사 가젯 모듈 연결 안 됨(0), 연결 됨(1) 상태를 나타내며, IG_FDBCK_SENSOR1 ~ 3 은 3개 접촉 센서의 접촉 안 됨(0), 접촉 됨(1) 상태를 나타낸다. IG_FDBCK_INJECTION는 주사제 사용 안 함(0), 트리거 모터 동작 중(1), 주사제 투여(2), 주사 성공(3) 상태를 나타낸다.
[Fig. 10]에서 약 23초에 주사 가젯 제어 모듈의 장착이 시작 되고, 약 25초에 장착이 완료된다. 30초에 주사 가젯 모듈이 장 착 된 후, 35초에서 50초 동안 주사 가젯 모듈이 주사부위에 수 직방향으로 접촉되었음을 알 수 있다. 40초에서 주사가 트리 거 되어 55초까지 유지된다. 이후 55초에 주사 가젯 모듈을 분 리하고, 약 60에 주사 가젯 제어 모듈이 완전 분리되었음을 알 수 있다.
3.2 산소공급 가젯 시험
산소공급 가젯은 부상자에게 경추 보호를 하는 동시에 산 소 공급을 할 수 있어야 하며, 가젯을 장착 중에 죠의 변위를 조 절할 수 있는 기능을 확인 한다.
시험 구성은 [Fig. 11]과 같이 산소공급 가젯 제어 PC, 산소 가젯의 상태 데이터를 분석/기록할 모니터링 PC, 데이터 기록 장치(DAQ), 산소공급 가젯 제어기, 파워 서플라이로, 부상자 (더미)로 구성된다.

Test configuration of oxygenation gadget
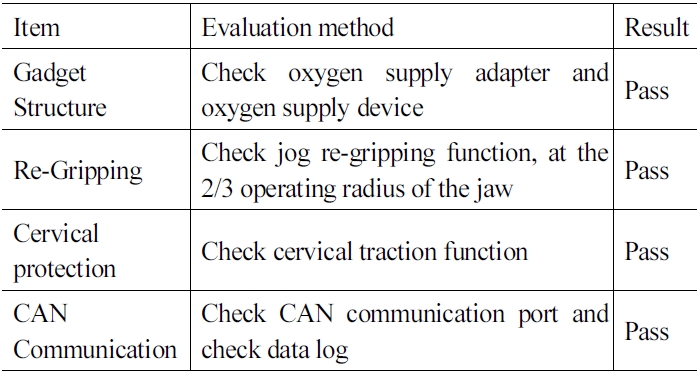
산소공급 가젯의 기능중 주요 시험 항목은 다음과 같이 4개 로 구성된다.
- 죠 재 그리핑 기능 동작 확인
- ․ 죠 닫힘을 리미트 센서로 확인
- ․ 공압 모터로 에어 커프 팽창 기능 확인
- ․ CAN 통신 동작성 확인
산소공급 가젯의 주요 기능에 대한 시험 절차는 [Table 6]과 같이 8단계의 순서로 구성된다.
Test procedure of oxygenation gadget
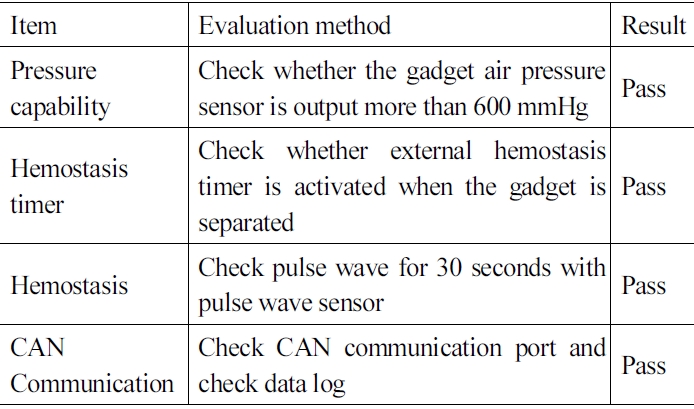
산소공급 가젯 시험 절차에 따른 기능 항목 시험 결과는 [Table 7]과 같다.
Test result of oxygenation gadget
산소공급 가젯과 제어PC간에 주고받은 명령과 상태 정보 는 [Fig. 12], [Fig. 13]처럼 CAN 데이터로 교환된다. [Fig. 12] 는 산소공급 가젯을 부상자 경추와 얼굴 부위에 죠를 이용하 여 장착하는 명령 시 발생되는 CAN 데이터 그래프를 측정한 결과이다. OG_CTRL_CONNECT는 산소공급 가젯을 매니퓰 레이터에 분리(0). 연결(1)을 명령을 나타내고, OG_CTRL_ JAW_ACTION은 산소공급 가젯의 죠 닫힘(2), 죠 열림(1), 죠 정지(0)를 명령을 나타낸다. OG_CTRL_AIRCUFF_ACTION 은 산소공급 가젯의 에어 커프 공기 주입 정지(0), 공기 주입 시 작(1) 명령을 나타낸다. 약 5초에 산소공급 가젯의 장착 명령 이 내려지고, 약 65초에 분리 명령이 실행된다. 약 10초에 죠 모터 닫힘 명령이 시작되고, 약 15초~25초 구간에서 죠 모터 열림/닫힘 명령이 수행되고, 약 35초에 죠 모터 정지 명령이 실 행된다. 약 38초에 에어 커프 공기 주입 시작 명령이 시작되어, 약 63초에 공기 주입이 정지된다.

Control signals of oxygenation gadget (CAN message)

State signals of oxygenation gadget (CAN message)
[Fig. 13]은 산소공급 가젯의 상태를 제어PC로 전달하는 CAN 데이터를 그래프로 나타낸 결과이다. OG_FDBCK_ CONNECT는 산소공급 가젯 제어 모듈 연결 안 됨(0), 연결 중 (1), 분리 중(2), 연결 됨(3) 상태를 나타낸다. OG_FDBCK_ JAW_LIMIT 산소공급 가젯의 리미트 센서 상태가 OFF(0), ON(1)를 나타낸다. OG_FDBCK_DISTANCE는 가젯 양쪽 죠 사이 간격을 나타내며 최대거리는 200 mm이다. OG_FDBCK _AIRCUFF_PRESSURE는 에어 커프 내의 공기 압력을 나타 낸다. 약 2초에 산소공급 가젯의 연결중 상태가 시작되어, 약 8 초에 연결완료 상태가 된다. 약 35초에 죠 리미트가 ON 상태 가 된다. 죠 사이 간격은 초기 약 120 mm 에 시작하여 점차적 으로 0 mm로 줄어든다. 재 그리핑 구간인 12초 ~ 27초 사이에 는 죠 사이 간격이 50 mm ~ 110 mm까지 변화했다가 최종적으 로 0 mm 근처로 줄어든다. 약 38초에 에어 커프 공기 주입 시 작 명령이 시작되어, 약 68초에 공기주입이 정지되며 이때 공 기압은 100 mmHg 정도로 나타냄을 볼 수 있다.
3.3 지혈 가젯 시험
부상자의 팔을 압박지혈을 시행해 지혈이 가능해야하며, 지혈이 가능하기 위해서는 환부 압박 시 부상자 혈압대비 300 mmHg 이상으로 가압할 수 있는 기능을 확인한다.
실험 구성은 [Fig. 14]와 같이 지혈 가젯 제어 PC, 지혈 가젯 의 상태 데이터를 분석/기록할 모니터링 PC, 데이터 기록 장치 (DAQ), 지혈 가젯 제어기, 맥박센서로 구성된다.

Test Configuration of tourniquet gadget
지혈 가젯의 기능중 주요 시험 항목은 다음과 같이 4개로 구 성된다.
- 지혈 가젯의 죠가 지혈부위에 접촉 여부를 접촉센서로 판 별 가능 확인
- ․ 공압 모터로 에어 커프를 혈압대비 300 mmHg 이상으로 가압 가능 확인
- ․ 지혈 가젯 공급 전원 차단 시, 지혈 타이머 동작여부 확인
- ․ CAN 통신 동작성 확인
지혈 가젯의 주요 기능에 대한 시험 절차는 [Table 8]과 같 이 8단계의 순서로 구성된다.
Test procedure of tourniquet gadget
지혈 가젯과 제어PC간에 주고받은 명령과 상태 정보는 [Fig. 15] ~ [Fig. 17]처럼 CAN 데이터로 교환된다. [Fig. 15]는 지혈 가젯을 부상자 출혈 부위에 죠를 이용하여 장착하는 명 령 시 발생되는 CAN 데이터를 그래프로 나타낸 결과이다. [Fig. 15]에서 TG_CTRL_CONNECT는 지혈 가젯을 매니퓰레 이터에 분리(0). 연결(1)을 명령을 나타내고, TG_ CTRL_JAW MOTOR_A_ACTION, TG_CTRL_JAWMOTOR_B_ ACTION 는 지혈 가젯의 죠 모터 A, 모터 B를 구동(1), 정지(0)를 명령을 나타낸다. TG_CTRL_AIRCUFF_ACTION은 지혈 가젯의 에 어 커프 공기 주입 정지(0), 공기 주입 시작(1) 명령을 나타내 고, TG_CTRL_EMERGENCY는 정상(0), 비상(1) 명령을 나타 낸다. 약 19초에 지혈 가젯의 장착 명령이 내려지고, 약 80초에 분리 명령이 실행된다. 약 22초에 양쪽 죠 모터 A/B 구동 명령 이 시작되고, 약 35초에 정지 명령이 실행된다. 약 41초에 에어 커프 공기 주입 시작 명령이 시작되어, 약 75초에 공기 주입이 정지된다. Fig. 16

Control signals of tourniquet gadget (CAN message)

State signals 1 of tourniquet gadget (CAN message)

State signals 2 of tourniquet gadget (CAN message)
[Fig. 16], [Fig. 17]은 지혈 가젯의 상태를 제어 PC로 전달하 는 CAN 데이터 그래프를 측정한 결과이다. [Fig. 16]의 TG_ FDBCK_SENSOR_A1~3/B1~3 는 양쪽 죠에 부착된 3개 접촉 센서의 접촉 안 됨(0), 접촉 됨(1) 상태를 나타낸다. [Fig. 17]의 TG_FDBCK_CONNECT는 지혈 가젯 연결 안 됨(0), 연결 중 (1), 분리 중(2), 연결 됨(3) 상태를 나타낸다. TG_FDBCK_AIR CUFF_ PRESSURE는 지혈 가젯 압력을 나타낸다.
약 13초에 지혈 가젯의 장착이 시작되고, 약 20초에 장착이 완료된다. 약 27초에 접촉센서 A/B가 접촉 상태로 감지되기 시작되어, 약 53초에 모든 센서가 접촉됨을 볼 수 있다. 약 43 초에서 에어 커프에 공기주입이 시작되어 약 75초에 에어 커 프내 압력이 650 mmHg 까지 상승함을 볼 수 있다.
4. 결 론
본 논문에서는 위험 지역에서 로봇을 이용한 응급처치를 위한 다양한 가젯 시제품 제작 결과를 소개하고 주사, 산소공 급, 지혈 가젯에 대한 기능 테스트 방안을 제시하였다. 시험 환 경 구성, 시험 항목, 시험 절차 설계를 통해 각 가젯 들의 기능 들을 육안 확인하거나 센서 및 모터의 상태를 CAN 데이터 로 깅을 통해 이상 여부를 판정 하였다.
주사 가젯 테스트는 부상자의 대퇴부에 수직 방향으로 접 촉 여부를 판별 후, 자동주사기로 최대 3회까지 주사 가능함을 확인하였고, 자동주사기의 안전핀 여부에 따라 동작 여부도 확인할 수 있었다. 산소공급 가젯 테스트는 안면부에 마스크 를 장착 중에 다시 죠의 변위를 조절 할 수 있는지를 확인하였 고, 죠를 장착 후 에어 커프를 이용한 경추 보호 기능이 동작되 면서, 마스크를 정확히 밀착하여 부상자에게 산소를 원활하게 공급할 수 있는 상태 완료 여부를 확인할 수 있었다. 지혈 가젯 테스트는 상박의 지혈부위를 죠가 정확히 둘러싸고 있는지를 접촉센서를 통해 확인하고, 에어 커프를 이용하여 충분한 압 력(맥박이 멈출 때 까지)을 인가하여 지혈 가능 여부를 확인할 수 있었다.
향후 이들 가젯과 연성 매니퓰레이터의 상호 연동 테스트 를 통해 시스템차원에서 기능 및 성능 평가를 수행할 예정이 며, 테스트 결과를 통해 나타나는 문제점과 가젯 사용상 발생 하는 문제점을 도출하여 개선된 시제품을 개발할 예정이다.
Acknowledgments
This research was supported by a grant for the project managed by Korea Electronics Technology Institute, “Development of dependable soft manipulator and multi-function gadgets for relief operation”, funded by the Civil-Military Dual-use Technology Program.
References
-
K. Jeong, J. Kang, G. Lee, S. Lee, Y. Seo, C. Choi, S. Jung, and S. Kim, “Development of a Robotic System for Searching Human Victims in Disasters,” Journal of Control, Automation and Systems Engineering, vol. 13, no. 2, pp. 114-120, February, 2007.
[https://doi.org/10.5302/J.ICROS.2007.13.2.114]

-
J. Casper and R. R. Murphy, “Human–Robot Interactions During the Robot-Assisted Urban Search and Rescue Response at the World Trade Center,” IEEE Transactions on systems, man, and cybernetics-PART B: CYBERNETICS, vol. 33, no. 3, pp. 367-385, June, 2003.
[https://doi.org/10.1109/TSMCB.2003.811794]
-
H. Miura, A. Watanabe, S. Suzuki, and M. Okugawa, “Field experiment report for tunnel disaster by investigation system with multiple robots,” 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 276-277, October, 2016.
[https://doi.org/10.1109/SSRR.2016.7784313]
-
C. J. Choi, J. An, S. M. Lee, and M. E. Jang, “Slip Considered Design and Analysis Pincers-type Gripper for Seizing Heavyweighted Cylindrical Objects,” Journal of Korea Robotics Society, vol. 10, no.4, pp. 193-199, December, 2015.
[https://doi.org/10.7746/jkros.2015.10.4.193]
-
H. Kim, D. Park, T. Choi, H. Do, D. Kim, J. Kyung, and C. Park, “Design of High Payload Dual Arm Robot with Replaceable Forearm Module for Multiple Tasks: Human Rescue and Object Handling,” Journal of Korea Robotics Society, vol. 12, no.4, pp. 441-447, December, 2017.
[https://doi.org/10.7746/jkros.2017.12.4.441]
- H. S. Kim, C. H. Park, D.-I. Park, H.-M. Do, T.-Y. Choi, D.-H. Kim and J.-H. Kyung, “Design of High Payload Dual Arm Robot with Modifiable Forearm Module depending on Mission,” 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligent, Jeju South Korea, pp. 83-84, 2017.
-
M. Schwarz, T. Rodehutskors, D. Droeschel, M. Beul, M. Schreiber, N. Araslanov,I. Ivanov, C. Lenz, J. Razlaw, S. Schuller, D. Schwarz, A. Topalidou-Kyniazopoulou, and S. Behnke, “NimbRo Rescue: Solving Disaster-response Tasks with the Mobile Manipulation Robot Momaro,” Journal of Field Robotics, vol. 34, no. 2, pp. 400-425, February, 2017.
[https://doi.org/10.1002/rob.21677]
-
T. Park, C. Jeong, J. Lee, S. Lee, I. Lee, H. Kim, J. An, and D. Yun, “Design of special end effectors for first aid robot,” 2017 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Shaghai, China, pp. 179-180, 2017.
[https://doi.org/10.1109/SSRR.2017.8088160]
-
Y.-J. Park, and W.-K. Chung, “Exact External Torque Sensing System for Flexible Joint Robot: Kalman Filter Estimation with Random Walk Model,” Journal of Korea Robotics Society, vol. 9, no.1, pp. 011-019, March, 2014.
[https://doi.org/10.7746/jkros.2014.9.1.011]

2013 대구대학교 임베디드시스템공학과(학사)
2015 대구대학교 정보통신공학(석사)
2015~현재 대구경북과학기술원 연구원
관심분야: 특수형 가젯, 임베디드 시스템

2013 경북대학교 전자공학과(학사)
2015 포항공과대학교 전자공학과(석사)
2015~현재 대구경북과학기술원 연구원
관심분야: 임베디드 시스템, 센서 인터페이싱 회로 설계, 로봇 핸드 제어

2006 영남대학교 기계공학(학사)
2011~현재 대구경북과학기술원 연구원
관심분야: 로봇 말단장치, 전기기계브레이크

2012 금오공과대학교 기계공학부(학사)
2016 경북대학교 기계공학과(석사)
2012~현재 대구경북과학기술원 연구원
관심분야: 전기-기계브레이크, 특수형 가젯, 로봇

2012 영남대학교 기계공학부(학사)
2012~2016 대우조선해양 배관설계원
2016~현재 대구경북과학기술원 연구원
관심분야: 국방사회안전로봇, 재활로봇, 로보틱스

1993 성균관대학교 기계공학부(학사)
1997 한국과학기술원 제어공학(석사)
2005 한국과학기술원 로봇공학(박사)
2005~2008 광운대학교 정보제어공학과 조교수
2008~ 현재 대구경북과학기술원 책임연구원
관심분야: 국방사회안전로봇, 재활로봇

1996 경북대학교 전자공학과(학사)
1998 경북대학교 전자공학과(석사)
2007 경북대학교 전자공학과(박사)
2005~현재 대국경북과학기술원 책임연구원
관심분야: 특수형 가젯, 차량 임베디드 시스템

2002 부산대학교 기계공학과(학사)
2004 광주과학기술원 기전공학(석사)
2013 한국과학기술원 기계공학(박사)
2016~현재 대구경북과학기술원 로봇공학과 조교수
관심분야: 자연모사 로봇, 산업용 로봇, 군용 로봇