사용자 운용 편의성을 위한 수중로봇 MR-1의 수조실험에 관한 연구

© Korea Robotics Society. All rights reserved.
Abstract
This paper describes a method for tracking attitude and position of underwater robots. Underwater work with underwater robots is subject to differences in work efficiency depending on the skill of the operator and the utilization of additional sensors. Therefore, this study developed an underwater robot that can operate autonomously and maintain a certain attitude when working underwater to reduce difference of work efficiency. The developed underwater robot uses 8 thrusters to control 6 degrees of freedom motion, IMU (Inertial Measurement Unit), DVL (Doppler Velocity Log) and PS (Pressure Sensor) to measure attitude and position. In addition, the thruster allocation algorithm was designed to follow the control desired value using 8 thrusters, and the motion control experiments were performed in the engineering water basin using the thruster allocation method.
Keywords:
Engineering Water Basin, Motion Control, Remotely Operated Vehicle, Underwater Robot1. 서 론
일반적으로 연근해 수중작업은 주로 잠수부에 의해 많이 수행되었다. 하지만 잠수부의 작업시간 한계, 안전성, 작업 효 율성등의 이유로 최근 잠수부를 대체한 수중로봇의 적용 사례 가 늘어나고 있으며, 특히 수중작업 중 관측과 조사에서 무인 수 중로봇(UUV, Unmanned Underwater Vehicle)을 활용하는 사례가 증가하는 추세이다. 관측과 조사를 위한 무인 수중로봇은 주로 원 격 무인 수중로봇(ROV, Remotely Operated Vehicle)을 주로 사용 하며 그중 관측용 원격 무인 수중로봇(OCROV, Observation Class Remotely Operated Vehicle)을 주로 사용한다.
관측용 원격 무인 수중로봇(OCROV)의 특징은 90 kg 미만 의 무게와 300 m 미만의 비교적 얕은 수심, 카메라, 소나등의 단순관측용 센서를 장착하고 있다[1]. 관측용 원격 무인 수중 로봇을 운용하기 위해서는 운용지원 및 전력공급을 위한 모선, 무인 수중로봇의 상대적인 위치를 측정하기 위한 LBL (Long Baseline), USBL (Ultra Short Baseline)등의 수중음향 위치 추적 장치(Acoustic Positioning System)등이 추가적으로 필요하며, 이를 효율적으로 운용하기위한 숙련된 운용자가 필요하다[2,3].
이외에도 수중 관측과 조사를 위해 무인 자율운항 수중로 봇(AUV, Autonomous Underwater Vehicle)을 활용하지만 이 는 실시간으로 관측과 조사 정보를 얻기 어렵고 원하는 위치 를 정밀하게 관측하기 힘들며, 내부에 탑재된 배터리를 이용 하여 운용시간에 제약이 있다.
관측용 원격 무인 수중로봇을 활용한 수중작업은 주로 수 중작업 전 사전조사, 해저 배관 및 케이블의 고장부위 진단, 교 각 및 선저 검사 등에 활용되며 정확한 수중 작업위치의 관측 및 조사를 위해 위에서 언급한 수중음향 위치 추적 장치를 활 용한다. 운용자는 측정된 상대 위치를 바탕으로 수중 작업지 점까지 조정하게 되며, 이때 운용자의 숙련도와 측정 데이터 의 해석능력에 따라 작업효율성이 차이가 나게 된다. 특히 수 중로봇의 위치유지, 자세유지, 목표 방향각 추종 등 운용자에 따라 작업효율이 달라지는 대표적인 예이다.
본 논문에서는 운용자의 숙련도에 상관없이 작업 효율을 향상 시키고, 운용자의 피로도를 감소시키기 위해 수중로봇이 운용자를 보조하여 수중작업을 수행할 수 있는 수중로봇을 개 발하고자 한다. 운용자의 개입을 최소화 하기위해서는 작업 목표지점까지 자율 운항과 작업 목표점에서의 자세제어가 필 수적이며 이를 위해 6 자유도의 운동을 제어할 수 있는 추진기 와 수중로봇의 위치정보와 자세정보를 계측할 수 있는 수중센 서가 필수적이다.
개발한 수중로봇은 6자유도 운동을 제어하기 위해 8개의 추진기를 가지는 과추진 시스템으로써 4개의 수평추진기와 4개의 수직추진기로 구성되어 있다. 6축의 운동을 제어하기 위해 각 추진기의 추력을 조합하여 운동제어를 수행하며 운 동제어시 현재 위치와 자세값을 측정을 위해 IMU (Inertial Measurement Unit)와 DVL (Doppler Velocity Log), 압력센서 를 사용하였다. 육상과의 통신은 이더넷 통신으로 구성하였으 며 전력케이블과 통신 케이블로 구성된 테더 케이블을 사용하 였다.
본 논문의 2장은 개발된 수중로봇, 센서의 구성과 상세사양 및 좌표계 설정에 관해 설명하고 3장은 개발된 수중로봇을 제 어하기위한 각 추진기의 추력벡터의 제어 방법에 관해 설명한 다. 4장에서는 개발된 수중로봇을 이용해 공학수조내의 운동 제어 실험 내용 및 결과를 설명한다.
2. 수중로봇 MR-1의 설계 및 좌표계 설정
2.1 MR-1의 구성
수중로봇의 전체적인 구성은 [Fig. 1]과 같고 추진기의 구성 은 하부 프레임에 4개의 동일한 수평추진기를 부착하고 내부 프레임에 4개의 수직추진기를 부착하여 총 8개의 추진기를 사 용하였다. 전방에는 2개의 아날로그카메라와 2개의 LED조명 을 상부에 위치시켰으며 ball-joint를 사용하여 설치 시 원하는 각도로 가변 되도록 하였다. 또한 수중 조사를 위한 2D Image sonar와 HD 카메라는 질량중심의 수직중점에 위치할 수 있도 록 하여 수중로봇의 자세에 따른 관측각도를 직관적으로 알 수 있도록 하였다.
![[Fig. 1]](/xml/26018/JKROS-15-1-32_F1.jpg "[Fig. 1]")
Configuration and coordinate system of MR-1
내압용기 내부의 구성은 육상에서 공급된 전력을 분배하는 전원분배보드와 제어를 위한 제어보드, 영상변환 보드로 구성 되어 있으며 내부에 센서는 Strap down 형의 IMU, 수심 측정 을 위한 압력센서로 구성되어 있다.
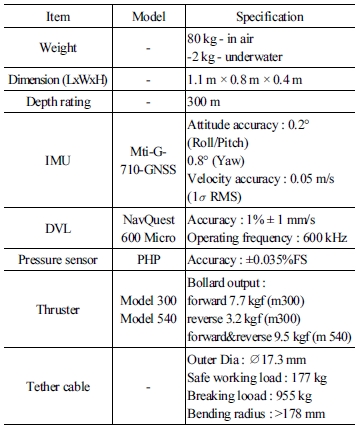
수중로봇의 전력공급과 육상의 통신을 위해 테더 케이블을 사용하였으며 수중로봇의 주요 사양은 [Table 1]과 같다.

Specification of MR-1
2.2 MR-1 설계
개발된 수중로봇 MR-1의 외피는 상부와 하부로 구분되고 내부는 추진기와 내압용기 하부프레임을 고정하는 구조로 설 계되어 있다. 내압용기를 제외한 외피와 내부 프레임은 무게 를 줄이고 목표수심 300 m에서의 내압성능을 확보하기위하 여 탄소섬유 복합체를 사용하여 성형 하였으며, 내압용기는 Al6061소재를 사용하였다.
수평 추진기는 전후, 좌우의 병진운동과 방향 회전이 가능 하도록 4개의 추진기를 수중로봇 각 모서리에 45° 각도로 배 치하였으며 수직 추진기는 각 축의 회전운동 시 작은 추력으 로 큰 모멘트를 발생시킬 수 있도록 수중로봇의 기구학적 중 심과 최대한 멀도록 배치하였다. 또한 앞뒤에 큰 추력의 수직 추진기를 배치하여 pitch 운동에 더 용이 하도록 하였다. 설계 된 수중로봇의 추진기 배치를 기구학적으로 나타내면 [Fig. 2] 와 같다.
![[Fig. 2]](/xml/26018/JKROS-15-1-32_F2.jpg "[Fig. 2]")
Thruster configuration of MR-1
수중로봇의 형상은 유체 저항을 줄이기 위해 유선형으로 설계 되었다. 설계 목표속도인 1.5 m/s 속도를 만족 하는지 확 인하기 위해 Midas NFX프로그램으로 유동해석을 수행하였 고 결과는 [Fig. 3]과 같다. 유동해석은 수중로봇의 형상만 고 려하였으며 외란이 없는 환경에 유속 1.5 m/s 유체에서의 전방 항력만을 고려하였다. 해석결과 전방항력은 13 kgf이며 4개의 수평추진기의 최대 전방추력 15.4 kgf로 설계 목표 속도 1.5 m/s를 만족함을 알 수 있다.
![[Fig. 3]](/xml/26018/JKROS-15-1-32_F3.jpg "[Fig. 3]")
Fluid flow contour of MR-1 at 1.5 m/s
내압 용기는 두께 6.5 mm의 원통형 구조로 설계하였고 설 계의 안전성 확인을 위해 Midas NFX 프로그램으로 구조해석 을 수행하였다. 해석조건은 수심 300 m의 작용압력인 30 bar 조건에서 양쪽 원판을 구속조건으로 하였으며 결과는 [Fig. 4] 와 같다. 결과에서 푸른색으로 표시된 부분이 낮은 안전율을 나타내며 최소 안전율은 1.8로써 목표 설계 압력에서 소성 변 형이 발생하지 않음을 확인하였다.
![[Fig. 4]](/xml/26018/JKROS-15-1-32_F4.jpg "[Fig. 4]")
Pressure housing structural analysis at 30 bar
2.3 좌표계 설정
IMU, DVL, 압력센서와 같이 위치와 자세를 측정하는 수중 항법센서를 사용하기위해서는 좌표계의 설정과 좌표계 변환 이 필요하다. 이를 위해 각 센서의 좌표계를 선체고정좌표계 xb,yb,zb로 변환하고 이를 다시 지구고정좌표계xe,ye,ze로의 변환이 필요하다. 개발된 수중로봇에서는 센서의 좌표계와 선 체 고정 좌표계의 각각의 축의 방향을 일치시켜 각 좌표계의 원점을 오프셋 만큼 이동시켰으며 [Fig. 2]와 같이 선체 고정좌 표계의 원점은 수중로봇의 질량중심으로 설정하였다. 선체 고 정좌표계의 xb의 방향은 수중로봇의 전진방향, zb의 방향은 수심방향, yb의 방향은 오른손 좌표계로 결정되도록 하였으 며, 지구 고정좌표계는 NED 좌표계를 사용하였다[4].
3. 수중로봇 운동제어
3.1 추진기 추력분배
8개의 추진기를 이용하여 6자유도 운동 제어를 수행하기 위해서는 각추진기의 적절한 추진기의 추력의 분배가 필요하 며 다음 식 (1), 식 (2)와 같이 나타낼 수 있다[5].
| (1) |
| (2) |
는 운동제어기에서 각축의 운 동제어에 필요한 제어 값을 나타내며 Ct 추진기 구성행렬, 는 추진기의 추력벡터를 나타낸 다. 추력분배는 각 추진기 배치에 따른 기구학적 특성을 반영 한 추진기 구성행렬을 이용하며, 추진기 구성행렬을 계산하기 위해 [Fig. 2]와 같이 각각의 추진기 위치에서 선체고정좌표계 의 xb축과의 수평, 수직 추진기의 수직 거리 dυ, dh와 yb축과 수평, 수직 추진기의 수직거리 lυ, lh그리고 각 추진기의 배치 각 θ를 이용하여 유도된 추진기 구성행렬 Ct 는 식 (3)과 같다.
| (3) |
위와 같은 추진기 구성행렬을 이용해 의사역행렬 을 구하 여 각 추진기에 필요한 추력을 구할 수 있다. 여기서 제어 목적에 맞는 6자유도 운동을 제어하기위한 추력벡터의 조합은 무수히 많이 존재할 수 있으므로 제어 목적과 구속조건의 정의를 이용 한 최적화를 통해 제어 목적에 맞는 최적 해를 특정할 수 있다.
| (4) |
| (5) |
이를 위해 식 (4)와 같이 최적화 인자를 추진기 추력벡터로 하고 에너지 소모를 최소화하도록 하는 목적함수를 이용하였 다. 여기서 구속조건은 추진기가 낼 수 있는 추력의 한계치로 정의하여 제약식을 식 (5)와 같이 정의하였다. 식 (4), 식 (5)를 이용해 정의한 라그랑지안은 식 (6)과 같다.
| (6) |
식 (6)을 각각 F와 ⋋에 관해 각각 편미분을 하면 식 (7), 식 (8)과 같다.
| (7) |
| (8) |
식 (7), 식 (8)을 이용하여 라그랑주 승수⋋를 계산하면 식 (9)와 같다.
| (9) |
식 (7)과 ⋋을 이용한 최적해 추력벡터 Fopt는 식 (10)과 같이 표현할 수 있다.
| (10) |
4. 수조 실험
4.1 수중 센서 실험
수중로봇의 방향과 위치를 추정하기 위하여 IMU/DVL을 이용해 선체 고정좌표계에서의 방향각과 속도를 측정하였다.
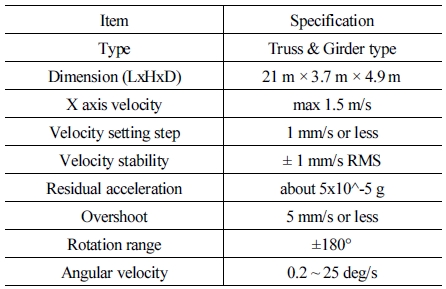
실제 IMU/DVL의 오차율을 측정하기위해 공학수조 내의 예인전차를 이용해 IMU/DVL 센서 단독시험을 수행 하였으 며 사용된 예인전차의 상세 사양은 [Table 2]와 같다.
Specification of tow carriage
센서 좌표계의 ximu, yimu, xdυl, ydυl 축을 각각 예인전차의 좌표축 방향과 물리적으로 일치시켜 예인 실험을 수행하였고 방향각 실험을 위한 예인전차 회전 각속도는 2deg/s로 설정 하고 각각 0°, 90°, 0°, -90°로 회전하였으며 위치 추정실험을 위 한 예인전차 가감속구간은 각각 3초로 설정하였다. 예인거리 는 5 m, 등속구간 속도는 0.3 m/s로 설정하였고 결과는 [Fig. 5], [Fig. 6]과 같다.
![[Fig. 5]](/xml/26018/JKROS-15-1-32_F5.jpg "[Fig. 5]")
IMU yaw angle test : reference tow carriage angle 0°, 90°, 0°, -90°
![[Fig. 6]](/xml/26018/JKROS-15-1-32_F6.jpg "[Fig. 6]")
DVL velocity test : reference tow carriage velocity x,y 0.3 m/s, distance 5 m, acceleration time 3seconds
IMU 센서로 측정된 방향각의 최대오차는 각각 0.2°, 1.6°, 2.9°, 3.5°로 계측 되었다. DVL센서로 측정된 등속구간의 x방 향의 평균속도는 0.29 m/s, y방향의 평균속도는 0.31 m/s로 계 측 되었고 등속구간의 표준편차 σx, σy는 각각 0.048, 0.017이 다. DVL로 계측된 속도를 적분하여 계산된 위치오차는 x방 향 0.05 m, y방향 0.12 m로 계측되었다.
IMU는 시간에 따라 방향각 오차가 증가하는 것을 확인할 수 있으며 DVL은 적분 오차와 표준편차 결과와 같이 DVL센 서도 위치측정에 신뢰도를 가지는 것으로 판단 된다.
4.2 수중로봇 운동 제어 실험
앞선 절의 추력분배기를 실제 수중로봇에 적용하기위해 수중센서와 8개의 추진기를 이용한 수중로봇의 자세와 수 심제어를 수행하는 실험을 수행하였다. 6축의 운동제어에 사용된 운동제어기는 PID 제어기를 사용하였으며 각축의 운동제어기는 다음과 같은 식을 사용 하여 제어 값 행렬 τ를 구하였다.
| (11) |
PID제어기에 사용된 제어 이득 값은 실험적 반복방식으로 얻어진 제어 이득 값을 사용하였다.
6자유도 운동제어를 위한 운동제어기와 추력분배기의 제 어 블록 다이어그램은 [Fig. 7]과 같다. 수중로봇 운동제어 시 스템은 Labview를 이용하여 구현하였고 추진기의 제어입력 은 운동제어기와 추력 분배기에서 계산된 제어입력을 아날로 그 신호로 변환하여 각 추진기 제어를 수행하였다.
![[Fig. 7]](/xml/26018/JKROS-15-1-32_F7.jpg "[Fig. 7]")
Block diagram of MR-1 motion controller
[Fig. 8]에 (a)는 목표 수심 1 m 수심제어와 목표 pitch각도 -20° 제어를 동시에 수행하는 운동제어 실험이며 [Fig. 8]에 (b)는 목 표 수심 2 m를 유지하며 4개의 경유 점을 통과하는 경유 점 제어 실험이다. 수심제어와 pitch각도 제어 실험의 IMU 센서와 압 력 센서에서 계측된 결과는 [Fig. 9]와 같다. 실제 계측된 pitch 각도 오차는 약 3°와 수심 오차는 약 0.1 m로 계측되었다.
![[Fig. 8]](/xml/26018/JKROS-15-1-32_F8.jpg "[Fig. 8]")
Underwater robot motion control test : a. desired depth 1 m, desired pitch angle -20°, b. desired depth 2 m, 5×5 m way-point
![[Fig. 9]](/xml/26018/JKROS-15-1-32_F9.jpg "[Fig. 9]")
Depth and pitch angle motion control test result
또한 수평운동과 수직운동제어를 수행하기위한 수심제어 와 경유점 제어 실험에서 경유점은 가로세로 5 m의 정사각형 의 각 모서리를 목표 경유 점으로 설정하여 실험을 수행하였 고 결과는 [Fig. 10]과 같다. yaw 방향의 과도상태시의 최대오 차는 22.2°이며 수평운동의 최대 위치오차는 0.46 m와 최대 수 심오차는 0.5 m로 계측되었다.
![[Fig. 10]](/xml/26018/JKROS-15-1-32_F10.jpg "[Fig. 10]")
Depth and way-point control test result
제어 결과와 같이 pitch각도 제어 시 수심의 변화가 발생하 나 제어 목표를 추종하는 것을 확인할 수 있으며 또한 경유점 추종을 위한 방향각 제어 시 초기에 방향각의 흔들림이 발생 하나 목표 방향각을 잘 추종하는 것을 확인할 수 있다.
5. 결론 및 고찰
본 논문에서는 8개의 추진기를 이용하여 6자유도 운동을 제어하는 수중로봇을 개발하였다. 수중 항법센서 예인전차 단 독실험결과를 이용하여 수중항법센서의 정밀도를 측정하였고 제어 목표에 따라 8개의 각추진기에 추력을 분배할 수 있도록 추력제어기를 설계하였다. 설계된 운동제어기와 추력분배기 의 성능 확인을 위해 실제 수중로봇에 적용하여 수조환경에서 수심제어, pitch 각도, yaw 각, 수평운동제어 실험을 수행하였다.
수심제어와 pitch 운동 실험결과에서 확인한 바와 같이 제 어 목표를 정확히 추종하지 못하고 pitch각도 제어가 수행될 때 수심이 변화하는 것을 확인할 수 있다. 이는 수심제어와 pitch각도 제어 시 4개의 수직추진기의 추력분배에 제어 가중 치가 설정되지 않아 발생하는 현상으로 분석된다.
다음으로 실험결과[Fig. 10]에 (a)에서 초기 yaw각도는 목 표 각도를 추종하나 이후 목표 각도가 급격히 변화하였을 때 과도상태의 오버슈트가 발생하는 것을 확인할 수 있으며 이에 따라 수평면 위치 드리프트가 발생하는 것을 [Fig. 10]에 (c)에 서 확인할 수 있다. 이는 운동 제어기의 특성에 따른 제어 이득 값의 문제로 분석된다.
또한 마지막 경유 점에서 방향제어의 응답특성이 이전 경 유 점과 다른 특성을 나타내며 이는 제자리에서 방향제어만 수행되어 4개의 수평추진기에 위치 이동에 필요한 추력이 제 외 되고 방향 제어에 필요한 추력만 분배되어 상대적으로 작 은 추력으로 방향 제어를 수행하여 이전 경유 점의 방향제어 응답특성보다 늦은 응답특성을 나타내는 것으로 해석된다.
수심제어와 경유 점 제어 그래프 [Fig. 10]에 (b)와 (c)에서 방향전환 시 수심을 유지 하지 못하며 상승하는 운동을 하는 것을 확인되며 이는 상대적으로 급격하게 변화하는 방향각에 따라 테더가 수중로봇의 운동에 영향을 준 것으로 판단된다. 테더의 최소 곡률반경은 0.178 m로 90°회전 시 필요한 최소 테 더의 길이는 0.279 m로 계산되며 방향각 회전시작 점에서부 터 최대 오버슈트지점까지 약 4초 동안에 상승된 수심의 변화 는 약 0.240 m로 계측 되었다.
본 연구는 과추진 시스템으로 설계된 수중로봇의 기초 연 구로 예인전차를 활용한 수중항법 센서의 오차와 외란이 없는 수조 환경에서 수중로봇의 운동특성에 관한 실험을 수행하였 다. 추후 개발된 수중로봇을 활용한 연구로는 6자유도 운동 시 제어 목표와 수중로봇의 운동특성을 고려한 제어 우선순위를 정할 수 있도록 가중치를 설정하여 운동제어를 수행할 계획이 며, 예인전차를 활용하여 계측된 수중항법 센서의 오차를 기 반으로 센서 오차모델링을 수행할 계획이다. 또한 8개의 추진 기중 일부가 고장이 발생하여도 원하는 자세와 위치를 주종할 수 있는 fault tolerance에 관한 연구를 수행할 계획이다.
최종적으로 위의 연구 성과를 활용하여 수중구조물 검사 및 수중 작업을 위한 소형 매니퓰레이터 탑재하여 이와 관련 된 연구를 지속적으로 수행하고자 한다.
References
-
R. D. Christ and Sr. R. L. Wernli, “The ROV Business,” The ROV Manual: a User Guide for Remotely Operated Vehicles, 2nd ed., Butterworth-Heinemann, 2013, pp. 1-20.
[https://doi.org/10.1016/B978-0-08-098288-5.00001-4]

- L. L. Whitcomb, “Underwater robotics: Out of the research laboratory and into the field,” 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, pp. 709-716, 2000.
- A. Pascoal, P. Oliveira, C. Silvestre, L. Sebastiao, M. Rufino, V. Barroso, J. Gomes, G. Ayela, P. Coince, M. Cardew, A. Ryan, H. Braithwaite, N. Cardew, J. Trepte, N. Seube, J. Champeau, P. Dhaussy, V. Sauce, R. Moitie, R. Santos, F. Cardigos, M. Brussieux, and P. Dando, “Robotic Ocean Vehicles for Marine Science Applications: the European ASIMOV Project,” OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, 2000.
- T. I. Fossen, “Modeling of Marine Vehicles,” Guidance and Control of Ocean Vehicles, vol. 199, no. 4, New York: Wiley, pp. 6-56, 1994.
- D. H. Kim, “Redundancy Resolution and Robust Controller Design for Dynamic Stability Enhancement of Underwater Vehicle-Manipulator System,” Ph.D. dissertation, Graduate School of Korea Maritime and Ocean University, Busan, Korea, 2016.

2013 한국해양대학교 조선기자재공학부 (학사)
2015 한국해양대학교 재료공학과(석사)
2015~현재 한국생산기술연구원 연구원
관심분야: 수중로봇, 수중항법, 자율운항

2010 건양대학교 기계공학(학사)
2013 한양대학교 기계공학(석사)
2013~현재 한국생산기술연구원 연구원
관심분야: 수중로봇 개발, 로봇동역학해석

2001 부산대학교 기계공학부(학사)
2010 부산대학교 지능기계공학과(박사)
2010~현재 한국생산기술연구원 수석연구원
관심분야: 해양로봇, 산업용 로봇 관련 연구 개발, 로봇실증 사업 및 실용화