센서리스 협동로봇의 직관적인 교시를 위한 직교공간 직접교시

© Korea Robotics Society. All rights reserved.
Abstract
Direct teaching is an essential function for collaborative robots for easy use by non-experts. For most robots, direct teaching is implemented only in joint space because the realization of Cartesian space direct teaching, in which the orientation of the end-effector is fixed while teaching, requires a measurement of the end-effector force. Thus, it is limited to the robots that are equipped with an expensive force/torque sensor. This study presents a Cartesian space direct teaching method for torque-controlled collaborative robots without either a force/torque sensor or joint torque sensors. The force exerted to the end-effector is obtained from the external torque which is estimated by the disturbance observer-based approach with the friction model. The friction model and the estimated end-effector force were experimentally verified using the robot equipped with joint torque sensors in order to compare the proposed sensorless approach with the method using torque sensors.
Keywords:
Collaborative Robot, Impedance Control, Human-Robot Interaction1. 서 론
전통적인 산업용 로봇의 경우, 사용자가 티치 펜던트(teach pendant)를 통해 로봇을 구동하고 프로그래밍을 통해 로봇 이 수행해야 할 작업을 작성하였다[1]. 그러나 이러한 방법 은 작업의 교시에 많은 시간이 소요되며, 로봇에 대한 지 식이 없는 작업자가 수행하기 어렵다는 단점이 있다. 이 러한 단점을 극복하기 위해 작업자가 로봇을 직접 잡아서 교시하는 직접교시(direct teaching) 방법이 개발되었으며[2-4], 협동로봇에는 필수적인 기능으로 자리잡았다[5]. 이는 로 봇의 각 관절에 작업자가 힘을 가하여 로봇을 움직이는 관절공간에서의 직접교시이며, 로봇 팔은 사람의 팔과 비 슷한 기구학적 구조를 가지므로 작업자는 큰 어려움 없이 로봇을 교시할 수 있다. 그러나 많은 로봇 작업이 말단부 (end-effector) 방위의 큰 변화 없이 직교 좌표계에서 수행 되므로, 로봇의 말단부 방위를 원하는 상태로 고정시킨 후 교시하는 직교공간 직접교시가 가능하다면 작업자는 보다 직관적으로 로봇을 사용할 수 있다.
직교공간에서의 직접교시는 임피던스 제어를 활용하여 구현 가능하다[6]. 임피던스 제어는 로봇 말단에 인가된 힘 에 대해서 설정된 임피던스 파라미터에 따라 로봇을 제어 하는 방법이며, 직선 방향의 강성을 0으로 설정하고 회전 방향 강성을 높게 유지한다면, 로봇 말단부의 방위를 유 지한채로 사용자가 힘을 가한 직선 방향으로 움직이게 하 는 것이 가능하다. 이러한 직교공간 직접교시는 로봇 말 단부에 인가되는 힘 정보를 필요로 하므로 로봇 말단부에 6축 힘/토크 센서를 부착하거나 각 관절에 토크센서를 탑 재한 로봇에만 한정적으로 적용되었다[7,8]. 그러나 대부분 의 로봇은 이러한 센서를 탑재하지 않으며, 직교공간에서 의 직접교시를 위해서 센서를 부착하여 추가적인 시스템 을 구축하는 것은 많은 비용이 발생하므로 별도의 센서 없이 로봇의 직교공간에서의 직접교시가 가능한 방법의 개발이 필요하다.
이를 위해서는 사용자가 로봇의 교시를 위해 로봇 말단 에 인가한 힘을 센서 없이 추정할 수 있어야 한다. 본 연 구에서는 모터토크와 마찰토크를 바탕으로 구성한 관측 기를 통해 얻은 외력토크를 사용하여 로봇 말단에 인가된 힘을 추정하고, 이를 토크 기반의 임피던스 제어 알고리 즘과 함께 적용하여 직교공간 직접교시를 구현하는 방법 을 제안한다. 제안하는 방법은 별도의 센서가 필요 없으 므로 기존의 토크 제어 기반 로봇에 큰 제약 없이 적용할 수 있으며, 관절공간에서의 직접교시와 더불어 사용한다 면 보다 편리한 작업의 교시가 가능하다.
본 논문은 다음과 같이 구성된다. 2장에서는 로봇 말단 에 인가되는 힘을 추정하는 방법과 토크 기반의 임피던스 제어 알고리즘에 대해 설명한다. 3장에서는 마찰모델의 구축 방법과 직교공간 직접교시 구현에 대해 서술하며, 4 장에서는 관절 토크센서가 부착된 로봇을 이용하여 개발 한 알고리즘을 검증한다. 5장에서는 본 연구의 결론에 대 해 서술한다.
2. 토크 기반 임피던스 제어
토크 제어 기반의 로봇을 이용하여 직교공간 직접교시 알고리즘을 구현하기 위해 다음과 같이 로봇의 동역학 방 정식을 고려한다.
| (1) |
여기서 M, C, g는 각각 링크의 관성 행렬, 코리올리스 힘 및 원심력에 관한 행렬, 중력 벡터를 의미한다. 또한, τext 는 로봇에 가해진 외력에 의해 각 관절에 나타나는 외력 토크 벡터이며, 본 연구는 로봇 말단에 힘을 인가하여 로 봇을 교시하기 위한 방법에 대한 내용이므로 τext는 로봇 말단에 인가된 힘에 의해서 나타나는 외력토크 벡터라고 정의한다. τj는 관절 구동부로부터 링크에 전달되는 관절 토크 벡터, q는 관절각 벡터이다.
2.1 말단 힘 추정
임피던스 제어를 구현하기 위해서는 로봇 말단에 인가 되는 힘의 추정이 필수적이다. 별도의 센서 없이 로봇 말 단에 작용하는 힘 fe를 추정을 위해 다음과 같은 τext와 fe 사이의 관계를 이용한다.
| (2) |
여기서 J는 로봇의 자코비안 행렬이며, 식 (2)를 통해 τext 로부터 fe를 계산할 수 있다.
τext는 로봇의 운동방정식 (1)로부터 다음과 같이 나타 난다.
| (3) |
이때, 관성행렬 M은 항상 대칭 행렬이므로 다음과 같 이 나타낼 수 있다[9].
| (4) |
식 (4)와 일반화 운동량(generalized momentum) 을 통해 식 (3)의 항을 다음과 같이 가속도 항 없 이 나타내는 것이 가능하다[10].
| (5) |
식 (3)과 (5)를 기반으로 외란 관측기를 구성하여 다음 과 같이 외력토크를 추정할 수 있다.
| (6) |
여기서 K는 관측기 이득을 나타내는 대각 행렬이며, 관측 기 설계에 포함된 1차 저역 통과 필터의 차단 주파수를 의미한다.
한편, 링크에 실제로 전달되는 관절토크 τj는 다음과같 이 나타낼 수 있다.
| (7) |
여기서 τm은 감속기의 감속비에 의해서 증폭된 모터토크, Jm은 모터의 회전자 및 감속기의 입력축의 관성모멘트, τf 는 감속기에서의 마찰토크를 나타낸다. 식 (7)을 (6)에 적 용하고 정리하면 다음과 같다.
| (8) |
식 (8)을 통해 모터토크로부터 외력토크를 추정할 수 있으며, 추정한 외력토크를 식 (2)에 대입하여 로봇 말단 에 인가된 힘을 구할 수 있다. 힘이 로봇 말단이 아닌 다 른 위치에 작용한 경우에 식 (2)를 사용하면 이 힘에 의해 나타난 외력토크를 생성할 수 있는 가상의 말단 힘이 추 정된다. 이러한 추정 힘과 사용자가 실제로 인가한 힘 사 이에는 힘의 작용점 차이로 인한 오차가 발생하지만, 직 접교시의 경우 사용자의 의도를 파악하는 목적을 가지므 로 사용자가 정확히 로봇 말단에 힘을 가하지 않아도 직 교공간 직접교시를 수행하는 것에는 큰 문제가 없다.
2.2 직교공간 임피던스 제어
로봇의 토크 기반 제어를 위해 로봇의 운동방정식을 기 반으로 제어토크 τ를 다음과 같이 구성한다.
| (9) |
위 수식에서 가속도 벡터에 해당하는 aq를 적절하게 구 성하여 목표로 하는 로봇의 거동을 구현할 수 있다. 임피 던스 제어를 위해서 aq를 다음 수식과 같이 나타낸다.
| (10) |
여기서 Md, Bd, Kd는 각각 질량행렬, 감쇠행렬 및 강성행 렬로 각 좌표축에 대한 계수를 성분으로 갖는 대각 행렬 이며, fe는 3축의 힘 및 모멘트 성분으로 구성된다. x는 말 단 위치 벡터이다.
식 (9)에 (10)을 대입하면 다음과 같은 제어 토크를 얻 는다.
| (11) |
각 추정치들이 정확하다고 가정하고 위의 제어토크를 식 (1)의 τj에 대입한 후 정리하면, 다음과 같이 설정한 임 피던스 파라미터와 로봇 말단에 인가된 힘에 대한 직교 좌표계에서의 로봇의 운동방정식이 나타난다.
| (12) |
식 (11)는 링크에 인가되는 토크 τj에 대해서 구성되었 으나, 실제로는 로봇의 구동은 각 모터의 출력 토크를 제 어하여 이루어진다. 따라서 식 (11)에 식 (7)을 적용하여 감속기의 마찰과 입력축의 관성 모멘트까지 고려하면 다 음 수식과 같이 직교공간 임피던스 제어를 위한 제어토크 를 얻는다.
| (13) |
이와 같은 토크 기반의 임피던스 제어 알고리즘을 정리 하여 블록선도로 나타내면 [Fig. 1]과 같다.
![[Fig. 1]](/xml/26105/JKROS-14-4-311_F1.jpg "[Fig. 1]")
Block diagram of Cartesian impedance control algorithm for torque-controlled robots
3. 센서리스 직접교시
3.1 마찰모델
직교공간 직접교시의 구현을 위해서는 식 (8)과 (13)에 서와 같이 마찰토크의 계산이 필요하다. 별도의 센서 없 이 이러한 마찰토크를 얻기 위해 다음과 같이 각 관절별 로 마찰모델을 수립한다.
| (14) |
여기서 τc는 쿨롱 마찰력을 나타내는 상수, τv는 점성 마 찰력으로 속도에 대한 3차 함수이다. ε는 속도 잡음에 의 한 채터링을 방지하기 위한 값이며, 본 연구에서는 0.1 deg/s의 값을 사용하였다.
마찰모델에 사용되는 계수를 알아내기 위해서 우선 다 음과 같이 마찰토크를 벡터 곱으로 나타낸다.
| (15) |
여기서 w는 로봇으로부터 측정 또는 계산 가능한 값을 모은 벡터이며, θ는 추정해야 할 파라미터로 구성된 벡터 로서 다음과 같이 정의된다.
| (16) |
실험을 통해 각 시점마다 얻은 n개의 데이터를 모아 마 찰토크를 다음과 같이 나타낸다.
| (17) |
실험 과정에서 마찰토크는 2.1절에서 설명한 방법과 같 이 관측기를 구성하여 추정한다. 이를 위해 우선 식 (1)과 (7)로부터 다음과 같이 수식을 구성한다.
| (18) |
위 식에 식 (4)와 (5)를 적용하고 관측기를 구성하면 다 음과 같이 마찰토크를 추정할 수 있다.
| (19) |
위와 같은 관측기는 외력이 작용할 경우 외력토크를 포 함한 결과를 추정하므로 외력이 인가되지 않는 환경에서 실험을 수행해야 한다. 최종적으로 다음과 같은 의사 역 행렬을 이용한 최소 제곱법 연산으로 θ 를 구한다.
| (20) |
이러한 과정을 통해 얻은 각 관절의 마찰모델을 통해 마찰토크를 계산하여 힘 추정 및 제어에 활용한다.
3.2 센서리스 직접교시
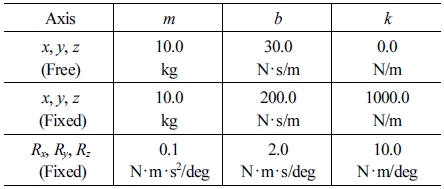
직교공간에서의 직접교시는 임피던스 파라미터 중 직 선 방향의 강성을 0으로 설정하여 구현한다. 이 경우, 직 선 방향의 복원력이 나타나지 않으므로 로봇의 말단은 사 용자가 힘을 인가하는 방향으로 움직이며, 이때 회전 방 향의 강성은 크게 설정하여 말단의 방위는 고정시킨다. 이를 통해 작업자는 말단 방위를 고정한 채로 로봇을 교 시하는 것이 가능하다. 또한, 특정 방향의 강성을 높게 설 정하여 그 방향으로는 로봇의 말단이 움직이지 못하도록 고정시킬 수 있다. 예를 들어, x축과 y축 향에 대한 강성을 0으로, z축 방향에 대한 강성을 크게 설정하면, 로봇의 말 단을 xy 평면 상에서만 움직이도록 교시할 수 있다. 본 연 구에서는 임피던스 파라미터를 [Table 1]과 같이 설정하여 직교공간 직접교시를 구현하였다.

Impedance parameters for Cartesian space direct teaching
[Fig. 2]는 센서리스 로봇의 직접교시를 위한 제어 흐름 도를 나타낸다. 사용자는 작업에 따라 관절공간 또는 직 교공간 직접교시를 선택하며, 이러한 기능을 통하여 사용 자가 편리하고 직관적으로 작업을 교시하는 것이 가능하 다. 이때, 관절공간 직접교시의 경우에는 다음과 같은 제 어 토크를 사용한다[4].
![[Fig. 2]](/xml/26105/JKROS-14-4-311_F2.jpg "[Fig. 2]")
Flowchart of sensorless direct teaching
| (21) |
여기서 KD는 속도에 대한 이득행렬로 각 관절의 감쇠력을 결정한다.
4. 실 험
직교공간 직접교시 알고리즘의 검증을 위해 [Fig. 3]와 같이 연구실에서 개발한 7 kg의 가반하중 및 900 mm의 작업반경을 갖는 협동로봇을 사용하여 알고리즘을 구현 하고 실험을 진행하였다. 실험에 사용한 로봇은 관절 토 크센서를 내장하고 있으며, 검증 실험을 통해 센서 정보 없이 구현한 결과와 토크센서의 측정값을 사용하여 구현 한 결과를 비교하였다.
![[Fig. 3]](/xml/26105/JKROS-14-4-311_F3.jpg "[Fig. 3]")
Collaborative robot arm equipped with joint torque sensors
4.1 마찰모델의 검증
센서 없이 로봇에 작용하는 외력을 추정하기 위해 필요 한 마찰모델을 세우기 위해 다양한 속도에서의 로봇 구동 실험을 수행하였다. 이를 통해 얻은 마찰토크 데이터를 바탕으로 3.1절과 같은 과정으로 마찰모델의 계수를 선정 하였으며, 마찰모델로 계산한 마찰토크를 검증하기 위해 로봇을 임의의 속도로 교시하였을 때 마찰모델을 통해 계 산한 마찰토크와 관절 토크센서를 이용하여 얻은 마찰토 크를 비교하였다. 이때, 관절 토크센서를 사용하여 추정한 마찰토크는 2.1절에서 설명한 관측기 구조를 통해 토크센 서로 측정한 관절 토크 τJTS를 사용하여 다음과 같이 계산 가능하다[11].
| (22) |
이와 같이 관절 토크센서 기반의 마찰 관측기는 로봇에 외력이 작용하는 상태에서도 마찰토크만 정확히 추정하 므로 마찰모델의 비교군으로 사용하는 데 적합하다.
[Fig. 4]은 로봇에서 가장 큰 부하가 걸리는 관절 2에 대한 실험 결과이다. [Fig. 4(a)]는 마찰모델을 통해 계산한 마찰토크와 관절 토크센서를 이용하여 추정한 마찰토크 를 비교한 그래프이며, [Fig. 4(b)]는 이때의 관절 속도를 나타낸다. 그래프를 통해 알 수 있듯이, 마찰모델을 통해 계산한 마찰토크가 마찰 관측기의 결과를 잘 따르며, 이 때 평균 제곱 오차는 3.4 Nm이다.
![[Fig. 4]](/xml/26105/JKROS-14-4-311_F4.jpg "[Fig. 4]")
Experimental verification of the friction model for joint 2: (a) friction torque, and (b) joint velocity profile
4.2 센서리스 직교공간 직접교시
센서리스 직교공간 직접교시 기능의 성능을 검증하기 위해 [Fig. 5]와 같이 로봇의 말단을 잡고 x, y, z 방향으로 로봇을 교시하는 실험을 진행하였다. 이때, x, y, z 방향의 임피던스 파라미터는 [Table 1]의 첫째 행과 같은 값을, Rx, Ry, Rz 방향의 임피던스 파라미터는 셋째 행과 같은 값을 사용하였으며, [Fig. 6]는 실험 결과를 정리한 그래프이다. [Fig. 6(a)]에서와 같이 로봇을 교시하는 동안 로봇 말단의 방위는 거의 변하지 않은 채로 유지하며, 이때 각 방위에 대한 평균 제곱 오차는 3.2°, 2.4°, 1.6°이다. [Fig. 6(b)]는 로봇을 교시하는 동안 마찰모델을 통해 계산한 마찰토크 를 바탕으로 식 (2)와 (8)을 통해 추정한 힘과 관절 토크센 서를 통해 추정한 힘을 비교한 그래프이다. 관절 토크센 서를 통해 추정한 힘은 식 (2)와 (6)을 통해 구할 수 있으 며, 이때 토크센서가 링크에 인가되는 토크를 직접 측정 하므로 다음과 같이 식 (6)의 τj를 τJTS로 대체한다.
![[Fig. 5]](/xml/26105/JKROS-14-4-311_F5.jpg "[Fig. 5]")
Sensorless direct teaching in Cartesian space
![[Fig. 6]](/xml/26105/JKROS-14-4-311_F6.jpg "[Fig. 6]")
Experimental verification of Cartesian space direct teaching: (a) measured position and orientation of the end-effector, and (b) estimated force
| (23) |
위 식에서 알 수 있듯이 관절 토크센서를 통해 얻는 외 력토크는 관절에 마찰에 관계없이 추정되므로 말단에 인 가되는 힘을 보다 정확히 계산할 수 있다.
[Fig. 6(b)]의 그래프를 통해 마찰모델을 기반으로 추정 한 힘이 토크센서를 기반으로 추정한 힘과 잘 부합되는 것을 알 수 있다. 그러나 로봇이 정지하고 있는 경우에는 오차가 발생하는 것이 보이며, 이는 관절이 정지한 경우 마찰은 쿨롱 마찰력 +τc와 –τc 사이의 구간에서 결정되고, 마찰모델을 통해서는 이때의 마찰을 정확히 추정하는 것 이 어렵기 때문이다. 이는 [Fig. 4]에서 관절 속도가 0이거 나 회전 방향이 바뀌는 지점에서 마찰모델로 추정하는 마 찰토크가 토크센서를 통해 얻은 마찰토크와 차이나는 것 을 통해서도 확인할 수 있다. 사용자가 로봇을 교시하지 않더라도 마찰 추정 오차로 인해 나타나는 힘에 의해서 구동될 수 있으므로 실험에서는 추정한 힘에서 -12 N ~ +12 N 영역을 불감대(dead band)로 설정하여 이를 방지하 였다. 이에 따라 로봇을 교시하는 데 필요한 힘의 크기가 증가했지만 그래프에서 확인할 수 있듯이 40 N 이내의 힘 으로 로봇의 교시가 가능하다.
5. 결 론
본 연구를 통해 모터토크와 마찰모델로부터 로봇 말단 에 작용하는 힘을 추정함으로써 임피던스 제어 기반의 센 서리스 직교공간 직접교시 기능을 구현하였다. 실험을 통 해 마찰모델로 계산한 마찰토크가 토크센서를 활용하여 얻은 마찰토크와 큰 차이가 없다는 것을 확인하였으며, 별도의 센서 없이 직교공간에서 40 N 이내의 힘으로 로봇 을 교시하는 것이 가능함을 보였다. 이러한 알고리즘은 토크 제어 기반의 로봇이라면 큰 제약 없이 적용 가능하 며, 관절공간 직접교시와 같이 사용되면 보다 편하고 직 관적으로 작업을 교시할 수 있다. 추후 연구를 통해 관절 에 작용하는 마찰을 보다 잘 설명할 수 있는 모델을 구축 하여 로봇 말단에 인가되는 힘의 추정 정확도를 높임으로 써 더 민감한 직교공간에서의 센서리스 직접교시를 구현 할 예정이다.
Acknowledgments
This work was supported by IITP grant funded by the Korea Government MSIT. (No. 2018-0-00622)
References
-
H. Fukui, S. Yonejima, M. Yamano, M. Dohi, M. Yamada, and T. Nishiki, “Development of teaching pendant optimized for robot application,” 2009 IEEE Workshop on Advanced Robotics and its Social Impacts, Tokyo, Japan, pp. 72-77, 2009.
[https://doi.org/10.1109/ARSO.2009.5587070]

-
D. Kushida, M. Nakamura, S. Goto, and N. Kyura, “Human direct teaching of industrial articulated robot arms based on force-free control,” A.jpgicial Life and Robotics, vol. 5, no. 1, pp. 26-32, 2001.
[https://doi.org/10.1007/BF02481317]
-
A. Winkler and J. Suchý, “Force-guided Motions of a 6-d.o.f. Industrial Robot with a Joint Space Approach,” Advanced Robotics, vol. 20, no. 9, pp. 1067-1084, Jan., 2006.
[https://doi.org/10.1163/156855306778394049]
- S.-D. Lee, K.-H. Ahn, and J.-B. Song, “Torque control based sensorless hand guiding for direct robot teaching,” 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, pp. 745-750, 2016.
- Robots and robotic devices – Collaborative robots, ISO/TS 15066:2016, 2016.
-
N. Hogan, “Impedance control: An approach to manipulation,” 1984 American Control Conference, San Diego, CA, USA, pp. 304-313, 1984.
[https://doi.org/10.23919/ACC.1984.4788393]
- R. Ikeura and H. Inooka, “Variable impedance control of a robot for cooperation with a human,” 1995 IEEE International Conference on Robotics and Automation (ICRA), Nagoya, Japan, pp. 3097-3102, 1995.
-
A. Albu-Schäffer, S. Haddadin, Ch. Ott, A. Stemmer, T. Wimbock, and G. Hirzinger, “The DLR lightweight robot: design and control concepts for robots in human environments,” Industrial Robot: The international journal of robotics research and application, vol. 34, no. 5, pp. 376-385, 2007.
[https://doi.org/10.1108/01439910710774386]
-
B. Siciliano, L, Sciavicco, L. Villani, and G. Oriolo, Robotics modeling, planning and control, Springer, 2009, pp.147~151.
[https://doi.org/10.1007/978-1-84628-642-1]
- A. De Luca and R. Mattone, “Actuator failure detection and isolation using generalized momenta,” 2003 IEEE Int. Conf. on Robotics and Automation (ICRA), Taipei, Taiwan, pp. 634-639, 2003.
-
L. Le Tien, A. Albu-Schäffer, A. De Luca, and G. Hirzinger, “Friction observer and compensation for control of robots with joint torque measurement,” 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, pp. 3789-3795, 2008.
[https://doi.org/10.1109/IROS.2008.4651049]
2014 고려대학교 기계공학과(공학사)
2014~현재 고려대학교 기계공학과 석박 통합과정
관심분야: 로봇 팔 제어, 강화학습

1983 서울대학교 기계공학과(공학사)
1986 서울대학교 대학원 기계공설계학과 (공학석사)
1992 MIT 기계공학과(공학박사)
1993~현재 고려대학교 공과대학 기계공학부 교수
관심분야: 협동로봇 설계 및 제어, 인공지능 기반로봇 조작