가변 강성 엑츄에이터인 재밍 메커니즘의 힘 체인 안정성 분석

© Korea Robotics Society. All rights reserved.
Abstract
In the case of conventional soft robots, the basic .jpgfness is small due to the use of flexible materials. Therefore, there is a limitation that the load that can bear is limited. In order to overcome these limitations, a study on a variable .jpgfness method has been conducted. And it can be seen that the jamming mechanism is most effective in increasing the .jpgfness of the soft robot. However, the jamming mechanism as a method in which a large number of variable act together is not even theoretically analyzed, and there is no study on intrinsic principle. In this paper, a study was carried out to increase the stability of the force chain to increase the .jpgfness due to the jamming transition phenomenon. Particle size variables, backbone mechanisms were used to analyze the stability of the force chains. We choose a jamming mechanism as a variable .jpgfness method of a soft robot, and improve the effect of .jpgfness based on theoretical analysis, modeling FEM simulation, prototyping and experiment.
Keywords:
Variable .jpgfness method, Jamming mechanism, Force chain, Backbone1. 서 론
최근 제4차 산업의 주요 연구 동향은 로봇과 사람과의 협업 입니다. 로봇과 사람과의 협업을 위한 중요한 지표는 로봇의 안정성입니다. 과거부터 사용되어온 강체 로봇은 정확하고 정 밀한 제어와 구동을 통해 큰 힘을 낼 수 있으며 이를 통해 다양한 산업 분야에서 우수한 성능을 발휘하였습니다. 그러나, 강체 로봇 은 제한된 자유도를 가지며 복잡한 제어 메커니즘(mechanism)에 의해 구동되기 때문에 비정형 환경에서 순응(compliance), 탄성 (elasticity) 및 안정성이 부족하다는 단점이 있습니다. 위의 말 은 강체 로봇이 사람과의 협업할 때, 물리적으로 큰 피해를 줄 수 있다는 말입니다. 따라서 로봇과 사람과의 협업 환경에서 로봇의 순응 및 가변 강성은 필수적이며 매우 중요합니다. 강체 로봇의 이러한 단점을 극복하기 위해 소프트 로봇(soft robot)에 대한 연구가 활발하게 진행되었습니다. 강체 로봇과 는 달리, 소프트 로봇은 비교적 덜 단단한 재질로 만들어져 있 기 때문에 자유롭게 변형이 가능하며 무한한 자유도를 가지고 있습니다. 또한 구조적인 변형은 비정형 환경에서 로봇과 환 경과의 상호 작용을 가능하게 합니다[1]. 이러한 기능은 사람과 의 협업 환경에서 안전하고 편리하게 작용하며 소프트 로봇이 적합하다는 것을 의미합니다[2].
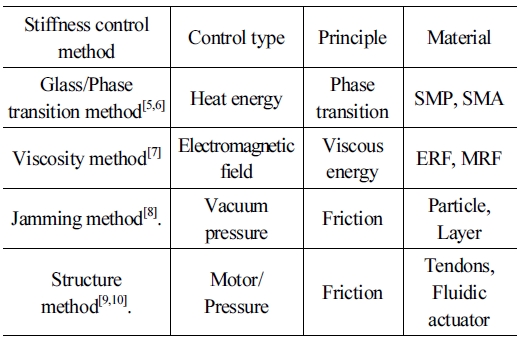
소프트 로봇은 로봇 분야에서 많은 주목을 받고 있지만 아 직 넓은 분야에 적용하기에는 문제점이 많습니다. 소프트 로 봇의 낮은 강성으로 인해 실제 현장에 적용하기에는 제한적이 기 때문입니다[3]. 따라서 강성을 제어하는 방법은 소프트 로봇 의 핵심 기능입니다. 소프트 로봇의 작은 강성은 비정형 환경 에서의 순응적인 움직임을 가능하게 하며, 큰 강성은 중량을 지지하거나 또는 힘을 전달합니다. 따라서 강성이 작은 경우 무한한 자유도를 통해 사람의 움직임에 따라 자유롭게 움직이 고, 강성이 증가하면 단단하게 고정되면서 큰 힘을 분산시켜 사람의 몸을 지탱하는데 도움을 주는 서포터(supporter)로서 의 역할이 가능합니다. 이러한 특성을 통해 소프트 로봇은 사람과 협력하여 신체의 부담을 줄이는 방식으로 사용될 수 있습니다. 이전 연구에서는 소프트 로봇의 강성을 제어하기 위한 여러 방법이 개발되었습니다[4]. 각 소프트 로봇은 사용 목 적 및 구동 환경에 따라 서로 다른 강성 제어 방법을 사용합니 다. 이 논문에서는 강성 제어에 사용되는 원리에 따라 분류하였 으며 강성 제어 방법에 대한 요약은 [Table 1]에 나와있습니다.

.jpgfness Control Method Used in Soft Robots
재밍(Jamming) 메커니즘이란 고정되어 있지 않은 입자는 자유롭게 움직이며 강성이 작습니다. 여기서 진공 압력(vacuum pressure)이 가해지면 입자들은 압력을 받고 입자 간에 힘이 형 성되면서 큰 강성을 갖게 됩니다. 오직 진공 압력의 적용 여부 만이 강성 변화에 영향을 주고 그 변화는 즉시 일어납니다. 진 공 압력을 가할 때 사용되는 진공 펌프는 부피가 크고 소음이 있다는 단점이 있지만 실제 다양한 작업이 수행되는 공장과 같은 산업 분야에 본 연구가 적용되기 때문에 진공 펌프의 부 피 또는 소음이 문제되지 않습니다. 따라서 재밍 메커니즘을 사용하여 강성을 제어하는 것은 매우 이상적인 방법입니다[11]. 하지만 지금까지 연구된 재밍 메커니즘을 사용한 소프트 로봇 에서는 더 큰 강성 변화를 달성하기 위한 본질적인 원리에 대 한 분석이 수행되지 않았습니다. 본 연구에서는 입자 간의 힘 분석을 통해 더 큰 강성 변화를 위한 매개 변수를 결정함으로써 재밍 메커니즘의 성능을 최적화합니다. 그리고 이를 통해 큰 힘 이 요구되는 작업을 하는 노동자의 신체의 부담을 덜어주기 위 해 서포터로 사용될 소프트 매니퓰레이터(manipulator)를 개발 하는 것이 연구의 최종 목적입니다.
2. 재밍 메커니즘 분석
재밍 메커니즘으로 인한 소프트 로봇의 강성 변화는 물질 의 성질 변화를 지칭하는 용어인 재밍 전환(transition) 현상을 통해 발생합니다[12]. 따라서 재밍 메커니즘의 본질적인 연구 는 기계적인 관점에서 입자 간의 상호 작용에 대해 연구하는 것입니다. 하지만 재밍 전환 현상에 대한 수학적인 분석은 여 전히 충분한 연구 결과를 얻지 못하고 있습니다. 재밍 전환을 위해서는 기본적으로 멤브레인 (membrane), 입자 및 진공 압 력이 필요합니다. 진공 압력이 없는 평상시에는 멤브레인 내부 의 입자가 유체처럼 자유롭게 움직일 수 있어 강성이 작으며, 진공 압력이 가해지게 되면 입자는 주위 입자들로 인해 압축되 며 입자 간의 마찰로 인해 제자리에 고정됩니다. 이 때, 재밍 메 커니즘에 의한 강성 변화의 크기가 클수록 외력을 안정적으로 견딜 수 있습니다. 따라서 본 논문에서는 강성 변화를 높이기 위해 재밍 전환 현상에 영향을 미치는 변수를 분석합니다.
힘 체인(Force chain)은 기계적인 시스템으로 외력에 의해 입자 간의 접촉을 통해 전달되는 입자로 구성된 힘입니다 [13,14]. 진공 압력이 가해진 후 외력에 대해 안정적일 때, 재밍 전 환 현상에 의해 힘 체인이 형성됩니다. 따라서 형성된 힘 체인 이 잘 유지되어야 더 큰 외력을 견딜 수 있는 강성을 갖습니다. 힘 체인은 다양한 원인에 의해 변화하지만 주로 입자 간의 마 찰에 따라 달라집니다. 우리는 소프트 메니퓰레이터가 실제 산 업에 종사하는 사람과 협력하여 사용될 때, 선형 모양이 아닌 구부러진 상태에서 큰 강성이 필요하다는 점에 주목하였습니 다. 하지만 구부러진 상태에서는 입자 간의 힘이 약하기 때문 에 외력에 의해 쉽게 좌굴(buckling)과 히스테리시스(hyteresis) 가 발생합니다[15]. 또한 힘 체인은 입자 간의 접촉에 의해 형성 된 힘이므로 좌굴이나 히스테리시스에 의해 힘 체인이 파괴되 면 전체 시스템의 강성 제어는 실패하게 됩니다. 따라서 더 큰 외력을 견디기 위해서는 힘 체인을 고정(locking)시키는 것이 중요합니다. 이 논문에서는 재밍 메커니즘의 성능을 효과적으 로 향상시키기 위해 힘 체인의 고정을 최대화할 수 있는 변수 에 대한 연구를 수행하고 두 가지 방법을 제시합니다.
2.1 입자의 크기
소프트 메니퓰레이터를 단순한 빔(beam) 형태라고 가정하 면, 강성을 나타내는 모델링 방정식은 식 (1)과 같습니다. 이 방정식에서 강성 k는 탄성 계수 e에 비례합니다.
| (1) |
재밍 메커니즘을 사용한 소프트 메니퓰레이터에 진공 압력 이 가해지면 멤브레인 내부의 입자는 새롭게 배열(array)된 형태 로 고정됩니다. 따라서 위의 방정식에 의해 이 순간의 입자 배열 이 외력에 대해 완전한 저항력을 가지면 강성(force-displacement) 은 선형을 나타냅니다. 하지만 형성된 힘 체인이 외력을 견디지 못해 입자가 재배치되면 강성은 불안정한 비선형을 띕니다. 즉, 탄성 계수와 강성은 입자의 재배치에 의해 직접적으로 결정됩 니다. [Fig. 1]은 동일한 크기의 3개의 입자가 있을 때, 입자 간의 접촉각에 따른 마찰력에 의해 재배치가 일어난다는 것을 보여 줍니다. 임계 각보다 작은 접촉각을 갖는 입자들은 외력에 대 해 배열 변화가 없고 강성을 유지할 수 있습니다.
![[Fig. 1]](/xml/26107/JKROS-14-4-326_F1.jpg "[Fig. 1]")
Particles of the same size are rearranged
식 (2), (3)에 의하면, 외력이 가해지면 힘 체인을 구성하는 입자는 주위 입자와 마찰력을 형성하고 이 마찰력은 접촉각에 따른 접선력(tangential force)을 의미합니다. [Fig. 2]에서 입자 의 크기가 다른 3개의 입자 간의 접촉각과 입자의 크기가 같은 3개의 입자 간의 접촉각을 비교해 보면 후자보다 전자의 접촉 각이 작다는 것을 알 수 있습니다. 결과적으로 다른 크기의 입 자로 구성된 배열은 외력에 의해 재배치가 적게 발생하며 힘 체인을 보다 안정하게 유지할 수 있어 안정성이 우수합니다.
![[Fig. 2]](/xml/26107/JKROS-14-4-326_F2.jpg "[Fig. 2]")
Particles of different sizes are rearranged
| (2) |
| (3) |
2.2 백본(Backbone)
힘 체인은 입자 간의 접촉으로 구성된 힘이므로 입자간의 모든 접촉에 대한 좌굴을 고려해야합니다. 이것은 힘 체인이 길수록 좌굴이 발생할 가능성이 높다는 것을 의미합니다. 이 러한 문제점을 해결하기 위해 재밍 메커니즘을 사용한 소프트 메니퓰레이터의 가운데 부분에 백본 형태의 형상을 통합하였 습니다. 재밍과 백본이 통합된 하이브리드 메커니즘은 힘 체 인의 길이를 줄여 힘을 고르게 분산시킴으로써 좌굴이 일어날 확률을 감소시킵니다. 또한 입자의 배열이 유지되고 강성이 변하지 않으므로 반복성과 히스테리시스의 측면에서 우수합 니다. 따라서 백본은 힘 체인을 고정하는 효과가 있으며 보다 안정하게 만듭니다.
본 연구의 소프트 메니퓰레이터의 목적은 굽힘 작업에서 로봇이 사람과 협력하여 사용될 때 신체의 부담을 줄이는 것 입니다. 백본의 형상은 목적에 따라 다양하게 설계될 수 있으 며 본 논문에서는 작업할 때 큰 힘이 요구되는 팔꿈치 또는 무 릎과 동일한 2 자유도의 백본을 제안합니다. 재밍 메커니즘이 사용된 소프트 메니퓰레이터는 사람의 관절에 부착되고, 강성 이 매우 낮은 진공 압력이 없는 상태에서는 사람의 움직임을 따릅니다. 따라서 [Fig. 3]과 같이, 백본은 다른 방향의 외력에 대한 간섭을 최소화할 수 있도록 간단한 링크 연결 형태로 설 계되며 굴곡 각도에 의해 제한되지 않고 구부러져야 합니다.
![[Fig. 3]](/xml/26107/JKROS-14-4-326_F3.jpg "[Fig. 3]")
Simple linkage joint
3. FEM 시뮬레이션
제안한 두 가지 방법에 대해 아이디어의 유효성을 확인하 기 위해 각각 Abaqus 6.1을 사용하여 FEM (Finite Element Method) 시뮬레이션을 진행하였습니다. 시뮬레이션의 변수 들을 단순화시키는 과정은 전체 시스템을 최적화하고 해석을 가능하게 합니다. 재밍 메커니즘의 원리를 고려할 때 입자 간 의 많은 접촉(contact)이 존재합니다. 따라서 우리는 3차원 시 뮬레이션을 진행하기에 앞서, 시뮬레이션의 정확성을 높이기 위해 간단한 2차원의 간단한 모델을 사용하여 다양한 변수를 최적화하였습니다. 시뮬레이션의 목적은 각 시뮬레이션의 매 개 변수(입자의 크기, 백본의 유무)가 입자 재배치에 미치는 영향을 검증하는 것입니다. 이 절차를 통해 힘 체인에 대한 가 설의 가능성을 파악하였고 유효함을 보여줍니다.
첫 번째, 입자만으로 구성된 소프트 메니퓰레이터의 입자 크기 변수에 따른 입자 간의 접촉각의 영향에 대한 힘 체인의 안정성을 조사하였습니다. 구형 입자 대신에 동일한 단면적을 갖는 원통형 입자를 사용하여 2차원 요소를 통해 3차원 시뮬 레이션을 수행하였습니다. 진공 압력에 의해 멤브레인 내의 입자들은 힘 체인을 형성합니다. 외력에 가해졌을 때, 힘 체인 형상을 유지하기 위해서는 입자의 재배치로 인한 강성의 변화가 없어야 합니다. [Fig. 4]에 따르면, 동일한 크기의 입자로 이루 어진 모델의 힘 체인은 퍼져 있지 않고 옅게 가한 힘의 방향으 로 형성되었습니다. 반면에 크기가 다른 입자로 이루어진 모 델의 힘 체인은 세고 넓게 형성되었으며 멤브레인 내의 입자 들의 이동 변위 또한 작음을 알 수 있습니다. 이를 통해 2.1쳅 터에서 제시한 가설과 동일한 결과를 확인하였으며 크기가 다 른 입자로 구성된 배열은 입자 간의 작은 접촉각에 따른 마찰 력에 의해 외력에 대해 더 안정함을 확인하였습니다.
![[Fig. 4]](/xml/26107/JKROS-14-4-326_F4.jpg "[Fig. 4]")
FEM simulation at the same particle size (left), multi particle size (right)
두 번째, 구부러진 상태에서 백본의 여부에 따른 힘 체인의 안정성을 조사하였습니다. 소프트 메니퓰레이터의 굽힘 강성 을 알아보기 위하여 양단이 고정된 상태에서 시뮬레이션을 수 행하였습니다. 이전 시뮬레이션의 설정을 기반으로 백본의 모 양과 방향은 임의로 설정하였습니다. [Fig. 5]에 따르면, 백본 이 없는 소프트 메니퓰레이터는 힘 체인이 좁은 범위에 형성 된 것을 볼 수 있는 반면에 백본이 통합한 소프트 메니퓰레이 터의 경우 [Fig. 6]과 같이 광범위하게 형성되어 있음을 알 수 있습니다. 따라서 앞의 분석과 동일하게 입자의 가운데 부분 에 백본을 통합하면 짧은 힘 체인이 넓게 분산되면서 입자와 백본 사이의 접촉 마찰에 의해 좌굴 확률을 낮춤으로써 큰 안 정성을 얻을 수 있음을 확인하였습니다.
![[Fig. 5]](/xml/26107/JKROS-14-4-326_F5.jpg "[Fig. 5]")
FEM simulation without backbone
![[Fig. 6]](/xml/26107/JKROS-14-4-326_F6.jpg "[Fig. 6]")
FEM simulation with backbone
4. 제작 및 실험
4.1 제작
소프트 메니퓰레이터를 제작하기 위해서는 멤브레인, 입 자, 백본이 필요합니다. 먼저, 멤브레인은 외부 환경에 의한 변 형이 자유로운 Ecoflex0030 (SMOOTH-ON)으로 선정하였습 니다. Ecoflex는 재료의 특성상 원하는 모양을 얻기 위해서는 몰드(mold)에 주입한 후 경화를 거쳐야 합니다. 따라서 멤브레 인 제작을 위한 몰드는 CAD 프로그램을 사용하여 설계하였 으며 3D 프린터를 통해 PLA 재질로 인쇄하였습니다. 입자는 주로 사용되는 구체 모양의 입자를 사용하였으며, 가볍지만 진공 압력으로 인한 입자 자체의 변형이 많이 일어나지 않도 록 스티로폼으로 선택하였습니다. 마지막으로 백본 또한 몰드 와 동일한 방식으로 3D프린터를 사용하여 출력하였습니다.
4.2 실험
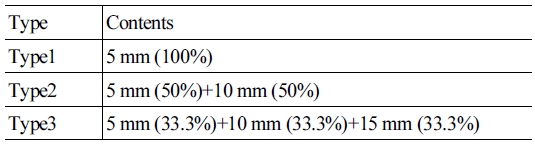
첫 번째, [Fig. 7]과 같은 3가지 유형(prototype)에 대하여 강 성의 크기를 비교하였습니다. 이 실험을 통해 다양한 크기의 입자가 존재할 때, 매니퓰레이터에 미치는 강성의 변화 여부를 검증하였습니다. 각 유형의 입자의 크기와 비율은 다음 [Table 2] 와 같고 [Fig. 8]과 같이 실험 장치를 구성하였습니다[16]. 소프 트 메니퓰레이터를 고정하기 위하여 서포터가 제작되었으며 변위에 대한 힘을 측정하여 강성을 도출하였습니다. 진공 압 력의 크기는 30 kpa로 수행하였으며 진공 펌프의 게이지를 통하 여 압력의 크기를 제어하였습니다. 정확한 실험을 위해 변위는 5 mm/cycle micro-stage를 사용하였으며 힘은 push-pull gauge를 사 용하여 측정하였습니다.
![[Fig. 7]](/xml/26107/JKROS-14-4-326_F7.jpg "[Fig. 7]")
Three prototypes
![[Fig. 8]](/xml/26107/JKROS-14-4-326_F8.jpg "[Fig. 8]")
Experimental setup
Three Prototypes
각 유형에 대한 결과 그래프는 [Fig. 9]와 같습니다. 유형2의 강성이 가장 크게 나타났으며, 유형1와 유형2의 강성은 비슷 하지만 유형3는 비교적 강성이 작게 나타났습니다. 이를 통해 단일 크기가 아닌 두 개의 다른 크기의 입자를 혼합하였을 때 가장 좋은 효과를 갖는다는 것을 확인하였습니다. 또한 다른 크기의 입자 간의 작은 접촉 각에 의해 입자의 재배치 확률이 작아지는 것이 확인되었지만 유형3과 같이 세 개의 다른 크기 의 입자가 혼합될 경우 입자 사이의 빈 공간에 의해 내부의 밀 도가 낮아져 강성이 낮아짐을 알 수 있었습니다. 이는 재밍 메 커니즘의 경우 입자의 크기뿐 만 아니라 내부의 밀도 또한 고 려되어야 함을 보여줍니다.
![[Fig. 9]](/xml/26107/JKROS-14-4-326_F9.jpg "[Fig. 9]")
FEM simulation with backbone
두 번째 실험을 통하여 구부러진 상태에서 백본의 효과에 대해 검증하였습니다. 유형2에 커버(cover)를 씌운 유형3을 포 함한 [Fig. 10]과 같은 3가지 유형에 대하여 강성의 크기를 비 교하였습니다. 실험 장치는 [Fig. 11]과 같이 구성하였으며 실 험 방법은 앞의 실험과 같습니다. 서포터는 굽힘 강성을 측정 하기 위하여 소프트 메니퓰레이터의 양단을 고정하는데 사용 되었습니다. 진공 압력의 크기는 60 kpa로 수행하였으며 정확 한 변위 측정을 위하여 linear stage를 사용하였습니다.
![[Fig. 10]](/xml/26107/JKROS-14-4-326_F10.jpg "[Fig. 10]")
Three types of soft manipulator
![[Fig. 11]](/xml/26107/JKROS-14-4-326_F11.jpg "[Fig. 11]")
Setup of the experiment
각 유형에 대한 강성 실험의 결과는 [Fig. 12]를 과 같으며 백본이 없는 유형1와 비교하였을 때 백본이 있는 유형2이 큰 강성을 나타냈습니다. 또한 커버를 씌운 유형3이 유형2에 비 해 월등히 큰 강성을 나타낸 것으로 보아 커버에 의하여 굽어 진 부분의 입자 배열이 고정됨으로써 큰 강성을 얻을 수 있음 을 보여줍니다.
![[Fig. 12]](/xml/26107/JKROS-14-4-326_F12.jpg "[Fig. 12]")
Experimental results of each prototypes
5. 결 론
결론적으로 본 논문에서는 소프트 로봇의 배경과 강성 제 어 방법의 필요성과 종류에 대하여 설명하였습니다. 본 연구 에서 선택된 재밍 메커니즘은 비 전형적인 환경에 효과적으로 적용한다는 장점이 있지만 재료의 특성으로 인해 강성이 작다 는 단점이 있습니다. 하지만 로봇 분야에서 아직 재밍 전환 현 상의 원리에 대하여 분석하거나 이론적으로 정의한 연구가 없 습니다. 따라서 본 논문의 2장에서는 재밍 메커니즘을 사용한 소프트 메니퓰레이터가 외력에 의해 안정하게 견디기 위해서 는 형성된 힘 체인을 유지하는 것이 중요하다고 분석하였습니 다. 또한 힘 체인을 유지하기 위하여 입자의 재배치를 방지하 는 방법으로 입자 크기와 백본 통합이라는 두 가지 방법을 제 시하였고 Abaqus 시뮬레이션과 실험을 통해 검증하였습니다.
결론적으로 본 논문에서는 재밍 메커니즘을 사용한 소프트 메니퓰레이터가 지지대로 사용될 수 있음을 검증하였습니다. [Fig. 13]과 같이, 커버로 덮여 굽힘 강성이 향상된 백본이 통합 된 3개의 소프트 메니퓰레이터는 병렬로 연결되어 사람의 팔 꿈치에 부착될 수 있습니다. 일반적인 상황에서 팔꿈치의 움 직임에 따라 자유롭게 움직일 수 있으며 진공 압력이 가해지 면 근육의 부담을 줄여주고 이를 통해 재활 치료 등의 목적으 로 사용될 수 있음을 확인하였습니다.
![[Fig. 13]](/xml/26107/JKROS-14-4-326_F13.jpg "[Fig. 13]")
Jamming supporter worn on the elbow
Acknowledgments
This work was supported by the Technology Innovation Program (20001228, Development of Coaxial Drive Module for Collaborative Robot with Sensor SoC Technology) funded By the Ministry of Trade, Industry & Energy (MOTIE, Korea)
References
-
D. Rus and M. T. Tolley, “Design, fabrication and control of soft robots,” Nature, vol. 521, pp. 467-475, May, 2015.
[https://doi.org/10.1038/nature14543]

-
L. Wang, S. G. Nurzaman, and F. Iida, “Soft-material robotics”, Found Trends Robot, vol. 5, no. 3, pp. 191-259, 2017.
[https://doi.org/10.1561/2300000055]
-
C. Majidi, “Soft Robtics : A Perspective-Current Trends and Prospects for the Future,” Soft Robotics, vol. 1, no. 1, pp.5-11, 2014.
[https://doi.org/10.1089/soro.2013.0001]
-
M M. Manti, V. Cacucciolo, and M. Cianchetti, “.jpgfening in Soft Robotics: A Review of the state of the Art,” IEEE Robotics & Automation Magazine, vol. 23, no. 3, pp. 93-106, Sept., 2016.
[https://doi.org/10.1109/MRA.2016.2582718]
-
Y. Yang, Y. Chen, Y. Li, Z. Wang, and Y. Li, “Novel Variable-.jpgfness Robotic Fingers with Built-In Position Feedback,” Soft Robotics, vol. 4, no. 4, pp. 338-352, 2017.
[https://doi.org/10.1089/soro.2016.0060]
-
B. E. Schubert and D. Floreano, “Variable .jpgfness material based on rigid low-melting-point-alloy microstructures embedded in soft poly (dimethylsiloxane) (PDMS),” RSC Advances, vol. 3, no. 46, pp. 24671-24679, 2013.
[https://doi.org/10.1039/c3ra44412k]
-
J. de Vicente, D. J. Klingenberg, and R. Hidalgo-Alvarez, “Magnetorheological fluids: a review,” Soft Matter, vol. 7, no. 8, pp. 3701-3710, 2011.
[https://doi.org/10.1039/c0sm01221a]
-
E. Brown, N. Rodenberg, J. Amend, A. Mozeika, E. Steltz, M. R. Zakin, H. Lipson, and H. M. Jaeger, “Universal robotic gripper based on the jamming of granular material,” National Academy of Sciences of the United States of America, vol. 107, no. 44, pp. 18809-18814, 2010.
[https://doi.org/10.1073/pnas.1003250107]
-
K. Suzumori, S. Wakimoto, K. Miyoshi, and K. Iwata, “Long bending rubbe rmechanism combined contracting and extending fluidic actuators,” 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, pp. 4454-4459, 2013.
[https://doi.org/10.1109/IROS.2013.6696996]
-
J.-H. Choi, D.-Y. Lee, and K.-J. Cho, “Dual-.jpgfness by Combined Structures for Rigidity-Tuning of Soft Robot,” Journal of Korea Robotics Society, vol. 12, no. 3, pp. 263-269, Sept., 2017.
[https://doi.org/10.7746/jkros.2017.12.3.263]
-
E.-J. Song, Y.-M. Lee, H.-P. Moon, H.-R. Choi, and J.-C. Koo, “Optimality Investigation of Bending .jpgfness According to Particle Size Distribution,” Journal of Korea Robotics Society, vol. 12, no. 3, pp. 332-338, Jul., 2017.
[https://doi.org/10.7746/jkros.2017.12.3.332]
-
N. G. Cheng, M. B. Lobovsky, S. J. Keating, A. M. Setapen, K. I. Gero, A. E. Hosoi, K. D. Iagnemma, “Design and Analysis of a robust, low-cost, highly articulated manipulator enabled by jamming of granular media,” 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, pp. 4328-4333, 2012.
[https://doi.org/10.1109/ICRA.2012.6225373]
-
J. F. Peter, M. Muthuswamy, J. Wibowo, and A. Tordesillas, “Characterization of force chain in granular material,” Physical Review, vol. 72, no. 04, pp. 041307, Oct., 2005.
[https://doi.org/10.1103/PhysRevE.72.041307]
-
G. Lois and J. M. Carlson, “Force networks and the dynamic approach to jamming in sheared granular media,” A Letters Journal Exploring The Frontiers Of Physics, vol. 80, no. 5, pp. 1-5, 2007.
[https://doi.org/10.1209/0295-5075/80/58001]
-
Y. Wei, Y. Chen, Y. Yang, and Y. Li, “A soft robotic spine with tunable .jpgfness based on integrated ball joint and particle jamming,” Mechatronics, vol. 33, pp. 84-92, Feb., 2016.
[https://doi.org/10.1016/j.mechatronics.2015.11.008]
-
A. Jiang, G. Xynogalas, P. Dasgupta, K. Althoefer, and T. Nanayakkara, “Design of a variable .jpgfness flexible manipulator with composite granular jamming and membrane coupling,” 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, pp. 2922-2927, 2012.
[https://doi.org/10.1109/IROS.2012.6385696]

2017 성균관대학교 기계공학과(공학사)
2018~현재 성균관대학교 기계공학과(공학 석사과정)
관심분야: Soft robot, Variable .jpgfness Mechanism, Pneumatic gripper

2016 성균관대학교 기계공학(공학사)
2018 성균관대학교 기계공학과(공학석사)
2019~현재 삼성전자 반도체연구소 연구원
관심분야: Soft Robot, Variable .jpgfness Actuator

1989 한양대학교 기계공학과(공학사)
1992 Mechanical Engineering, University of Texas at Austin(공학 석사)
1997 Mechanical Engineering, University of Texas at Austin(공학 박사)
1997~2001 IBM 연구원
2001~현재 성균관대학교 기계공학부교수
관심분야: Robot Mechanism Design, Human Machine Interactions, Actuators, Sensors, Control of Dynamic System