의수 소켓 설계를 위한 6축 인체 탄성도 측정 장치 개발

© Korea Robotics Society. All rights reserved.
Abstract
The paper proposes a .jpgfness measurement device composed of a measurement part including six indenters and a fixing part including four fixtures. The device is able to make simultaneously measurements of the .jpgfness of human arm. The six indenters make use of both position and force control schemes sequentially whenever needed. In addition, the loadcells and the digital encoders are attached to the indenters and electric motors, respectively, so that the data can be provided in real time. On the end of the indenter, two-axis potentiometer is attached in order to measure the angle difference between the applied force axis and the axis normal to the skin of human arm, and to convert the force measured on the loadcell into the actual applied force to skin. For this purpose, the mapping between the voltage output and the angle of potentiometer was obtained by fitting it for each axis. Ultimately, the measurement device was able to measure the .jpgfnesses of six regions of human arm.
Keywords:
.jpgfness of Human Arm, Prosthetic Socket, Indenter, Soft Tissues, Limb Amputation1. 서 론
인간의 상지(upper limb)와 하지(lower limb)는 일상생활 속 의 다양한 신체 활동을 하는데 중요한 역할을 한다. 그러나 다 양한 원인으로 절단 환자가 지속적으로 발생하고 있으며, 앞 으로 더욱 증가할 것으로 예상된다[1]. 이에 따라 절단 장애인 (amputee)을 위한 의지(prosthesis)의 기능에 대한 중요성은 점 점 커지고 있다. 의지를 개발함에 있어 고려해야 할 요소들은 의지 착용 시 외형에 대한 거부감과 비용 부담이 적어야 하며, 일상생활 활동(activity of daily living)에서 사용자들에게 우수 한 착용감(wear-ability)을 제공하는 것이다. 이러한 요소들을 충족시키기 위해, 정형외과 및 재활의학을 포함한 다양한 분 야에서 절단 부위와 직접적으로 접촉되는 소켓(socket)에 관 한 연구들이 진행되고 있다[2-5]. 소켓은 절단 부위와 의지를 연 결해주는 부분으로, 대부분 소켓의 경우 제조 공정에 대한 표 준화된 방법이 없으며, 재생산이 어렵고, 성능 또한 제조업체 마다 다르다[6]. 이러한 이유로 많은 절단 장애인들은 소켓 사 용에 대한 피로감과 불편함을 느끼고, 염증 및 조직 손상 등의 피부 문제가 발생하기도 한다[7].
따라서 절단 장애인을 위한 맞춤형 소켓 제작에 유용한 정 보인 인체 탄성도를 측정하는 장치들이 개발되고 있다[8-11]. 측 정된 데이터에서 얻은 생체 역학 모델은 기계적 하중을 인체 에 적용해야 하는 스포츠 의류, 신발, 의지 등에 대해 중요한 정보를 제공할 수 있다[12,13]. 인체 탄성도 측정 장치의 대표적 인 예로는 MIT의 휴 허(Hugh Herr) 교수팀에서 개발한 장치가 있다[8]. 이 장치는 총 14개의 압자(indenter)가 측정 부위를 둘 러싸는 형태를 가지고 있다. 11개의 압자는 탄성도(.jpgfness) 를 측정하고자 하는 절단 부위의 고정을 위해 사용된다. 나머 지 3개의 압자 중의 하나는 탄성도 측정을 위해 사용되고, 2개 는 측정 부위의 영향을 주지 않기 위해 사용하지 않는다. 그러 나 11개의 고정용 압자가 고정을 위해 작용하는 힘에 기인하 여 원하지 않는 힘들이 전달되어 측정 부위가 변형되는 문제 점을 가지고 있다. 또한 압자의 끝 단에는 수동 2-자유도(passive two degrees-of-freedom)를 가지는 유니버설 조인트(universal joint)가 배치되어 있고, 이를 통해 인체와 접촉하여 수직으로 압입(indentation)이 이루어질 수 있지만, 구동기(actuator)가 제공하는 힘의 방향과 압자(indenter)가 피부에 압입되어 힘을 측정하는 방향이 서로 상이한 문제가 남는다.
본 논문에서 제안하는 인체 탄성도 측정 장치는 다음과 같 은 3가지의 요소를 고려하여 설계되었다. 첫째, 개발된 장치는 인체에 대한 고정부와 측정부의 위치가 분리되어 작동하면서 실험할 때 발생할 수 있는 피실험자의 움직임을 예방하며 움 직임에 기인한 영향을 최소화한다. 둘째, 측정부의 끝 단이 피 부에 닿는 순간을 측정할 수 있도록 하여 압입되는 정도를 정 확하게 측정한다. 마지막으로, 피실험자의 피부와 측정부 끝 단이 수직이 되는 상태로 압입되도록 설계한다.
본 논문의 2장에서 측정 장치의 하드웨어와 소프트웨어에 대하여 설명하고, 3장에서 인체 탄성도 측정 실험을 위해 사용 되는 센서를 통한 데이터 수집에 관한 것과 실험 절차에 대해 서 기술한다. 또한 4장에서는 본 연구의 실험 결과를 제시하 며, 마지막으로 5장에서는 본 논문의 결론 및 추후 연구방향을 서술한다.
2. 인체 탄성도 측정 장치
인체 탄성도 측정 장치는 [Fig. 1]과 같이 기구적인 측면에 서 크게 측정부(measuring part)와 고정부(fixing part)로 나눌 수 있다. 첫째, 측정부는 총 6개의 압자(indenter)들이 360 도를 기준으로 균등하게 배분하여 압입할 수 있도록 60도 간격으 로 배치되어 있다. 측정부에서 마주하고 있는 압자 사이의 간 격은 약 27 mm에서 최대 115 mm까지 조절할 수 있도록 설계 되었고, 이에 따라 측정 부위의 지름 및 폭 등은 제한을 받는다. 둘째, 고정부는 총 4개의 선형 서보 모터(linear servomotor)가 90 도 간격으로 배치되어 있으며, 측정 부위에서 약 135.5 mm 떨어진 부위를 선형 서보 모터가 4방향에서 누르면서 측정 부 위를 고정시킨다. 또한 측정부와 고정부는 2층 구조로 되어 있 어 피실험자의 인체 탄성도를 측정할 때, 고정부에서 생기는 피부 및 연조직(soft tissues)의 변화에 대한 영향이 측정 부위 로 전이되는 것을 최소화하였다.
![[Fig. 1]](/xml/26139/JKROS-14-58_F1.jpg "[Fig. 1]")
Six-axis .jpgfness measurement device composed of the measuring part including indenters and the fixing part
[Fig. 2]는 측정부의 한 축에 대한 전체 구성을 나타낸다. 회 전 DC 모터(rotary DC motor)에 볼 스크류(ball-screw) 및 선형 가이드(linear guide)를 접목시켜 직선 운동(linear motion)이 가 능하도록 하였다. 회전 모터에 장착된 엔코더 (encoder)를 사 용하여 움직인 거리, 즉 피부 겉 면으로부터 압입되는 거리를 측정할 수 있도록 하였고, 로드셀(loadcell)을 부착하여 모터 축 방향으로 인가되는 힘을 측정할 수 있도록 개발하였다. 위 의 두 가지 센서를 사용하여 피실험자의 인체 탄성도(.jpgfness) 를 측정할 수 있다. [Fig. 3]은 압자의 끝 단에 부착된 2축 포텐 쇼미터(potentiometer)를 나타내며, 구동범위가 -30 도 ~ +30 도인 2 자유도를 가진 수동 관절(passive joint)의 역할을 함과 동시에 각도를 측정할 수 있다. [Fig. 3]과 같이 피실험자의 피 부와 압자 사이를 서로 수직 관계로 형성하도록 하며, 동시에 모터 축과 압자 축의 각도를 측정하여 압자가 인체에 압입하 면서 측정되는 수직 힘을 정밀하게 계산할 수 있다.
![[Fig. 2]](/xml/26139/JKROS-14-58_F2.jpg "[Fig. 2]")
Structure of the indenter located inside the measuring part, where the indenter consists of DC motor with encoder, ball-screw, loadcell, 2-axis potentiometer, and indenter head
![[Fig. 3]](/xml/26139/JKROS-14-58_F3.jpg "[Fig. 3]")
2-axis potentiometer equipped into the indenter
[Fig. 4]는 제안된 인체 탄성도 측정 장치 시스템의 전체적 인 구성을 블록 다이어그램이다. 여기서 xd [m]와 Fd [N]는 목 표 거리와 목표 힘을 나타내고, θx와 θy은 각각 포텐쇼미터로 부터 측정된 x-축과 y-축의 각도이다. x[m]와 F[N]는 엔코더 (encoder)로부터 측정된 위치와 로드셀(loadcell)로부터 측정 된 힘이다. PC와 MCU(microprocessor)는 직렬 RS232 통신 (serial RS232 communication)으로 신호를 주고 받을 수 있으 며, PC에서는 고정부와 측정부의 동작 신호, 그리고 IDLE 상 태 복귀 신호를 전송할 수 있다. PC에서 명령을 받은 MCU에 서는 선형 서보 모터에 구동 신호를 전송하거나, CAN 통신을 통해 모터 컨트롤러(motor controller)에게 목표 위치와 힘에 대한 정보를 전달할 수 있다. MCU의 명령에 따라 모터 컨트롤 러는 위치와 힘 제어 중 원하는 제어를 선택하고 회전 모터 (rotary motor)를 구동할 수 있다. 엔코더와 로드셀에서 이동 거 리와 접촉 힘을 동시에 측정하여 탄성도(.jpgfness)를 구하기 위한 파라미터들을 얻을 수 있으며, 압자의 끝 단에 있는 2축 포텐쇼미터로 모터 축과 피부 접촉면 사이의 각도를 측정할 수 있다. 정리하면 제안된 측정 장치에서는 엔코더(encoder)와 로드셀(loadcell), 그리고 2축 포텐쇼미터(potentiometer)를 비 롯하여 총 3개의 센서가 6개의 측정부에 각각 배치되어 있다.
![[Fig. 4]](/xml/26139/JKROS-14-58_F4.jpg "[Fig. 4]")
Block diagram of the .jpgfness measurement system for human arm
3. 인체 탄성도 측정 실험
인체 탄성도를 측정하기 위한 세부 사항 및 적용 실험 절차 를 본 장에서 자세히 다루고자 한다. 본 연구는 한양대학교 기 관 생명윤리위원회(the Institutional Review Board: IRB)에서 2018년 7월 (HYI-16-055-6) 생명윤리심의 최종승인을 받은 후에 진행하였다.
3.1 인체 탄성도
엔코더는 한 바퀴 회전 당 256 펄스(pulses per rotation)를 제 공하면서 압자(indenter)가 볼 스크류(ball-screw)를 통해 직진 운동을 할 때, 움직인 거리를 다음 식으로 구할 수 있다.
| (1) |
여기서 nPPR은 엔코더에서 출력되는 펄스 수이며, 엔코더와 연 결되어 있는 DC 모터가 시계방향으로 회전하면 증가하고, 반 시계 방향으로 회전하면 감소하게 설정되어 있다. 또한, lLead 은 볼 스크류의 리드(lead: distance per one rotation) 길이이며 제 안된 측정 장치에서는 리드가 2 mm인 볼 스크류가 사용되었다.
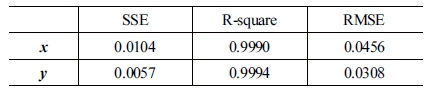
또한 압자 끝 단에 부착된 2축 포텐쇼미터의 각도와 출력 전 압 사이의 데이터를 측정하여 선형 피팅(linear fitting)을 수행 하였다[Fig. 5], [Table 1]과 같이 R-square의 값은 0.999 이상 으로 선형 피팅한 직선 방정식이 각도-전압 데이터와 아주 유사하게 나타났으며, 이를 통해 측정 부위 면에 법선(normal direction) 방향과 모터 축 사이의 각도를 정밀하게 측정할 수 있었다. [Fig. 6]은 포텐쇼미터의 2자유도 수동 운동에 기인 하여 압자의 끝 단에 생성되는 각도 및 힘을 나타낸 것이다. Fθ 는 로드 셀과 포텐쇼미터의 데이터를 토대로 계산된 측정 부위 면의 수직 힘이며, 모터 축(z축) 방향으로 가하는 힘 F와 x축, y 축 방향으로 꺾이는 각도 θx, θy를 측정하여 다음 식으로 나타 낼 수 있다.
![[Fig. 5]](/xml/26139/JKROS-14-58_F5.jpg "[Fig. 5]")
Relationship between the angle variations of the potentiometer attached on the indenter endpoint and its output voltages, and their linear fitting

Linear fitting results of x-axis and y-axis of the potentiometer, where SSE implies the sum of the squared errors, R-square denotes how close the data are to the fitted regression line, and RMSE means the root mean square error
![[Fig. 6]](/xml/26139/JKROS-14-58_F6.jpg "[Fig. 6]")
Coordinate system of the 2-axis potentiometer, where the motor axis was assigned to z-axis in the figure
| (2) |
여기서 θ는 포텐쇼미터에서 측정되는 두 축의 각도 θx, θy를 통해 다음과 같이 계산된다. 이는 모터 축과 측정 부위 면의 법 선 방향 사이의 각도를 나타낸다.
| (3) |
따라서, 식 (2)와 (3)을 통합하여 Fθ와 F의 관계식을 다음과 같이 구할 수 있다.
| (4) |
식 (1)과 (4)로부터 본 논문에서 제안한 측정 장치를 통해 인 체 탄성도를 얻기 위한 파라미터들을 구할 수 있으며, 이를 이 용하여 다음 식으로 인체 탄성도 k를 계산할 수 있다.
| (5) |
여기서 xdis는 측정 부위와 압자가 접촉한 순간부터 움직인 거 리로, 즉 측정 부위로부터 압입된 거리이다. 인체 탄성도는 측 정부의 6축에 대하여 각각 계산되며, 모든 센서 데이터들은 실 시간 측정이 가능하도록 개발되었다. 단축 상태에서의 탄성 도 측정결과 신뢰성 검증은 실제 스프링을 사용하여 이루어 졌다[14].
3.2 실험 절차
본 논문에서 제안된 인체 탄성도 측정 장치는 [Fig. 7(a)]와 같이 고정부에 측정하고자 하는 인체 부위를 삽입한 뒤 측정부 에서 탄성도 계산에 필요한 파라미터들을 측정하였다. 상지 절단 환자의 경우, 전완(trans-radial) 절단이 상완(trans-humeral) 절단보다 많이 발생하는 것으로 조사되고 있다[15]. 따라서 측 정 대상 부위는 피실험자의 왼쪽 전완(forearm)으로 선정하였 으며, [Fig. 7(b)]와 같이 팔꿈치 에서 약 45 mm 떨어진 위치의 인체 탄성도 측정을 진행하였다. 피실험자가 측정 장치에 측 정 부위를 삽입하면, 실험자는 PC를 통해 고정부를 동작하게 하는 명령을 입력한다. 이후, 4개의 선형 서보 모터가 측정 부 위로부터 약 135.5 mm 떨어진 부위를 10 N의 힘으로 고정시 킨다. 고정부가 움직이기 시작하면, 5초 후에 측정부가 동작을 시작한다. 측정부의 압자들은 미리 설정된 힘으로 측정 부위 를 압입하게 되며 실험자가 PC를 통해 복귀 명령 신호를 입력 하지 않는 이상 압입하고 있는 상태를 유지한 다. 복귀 명령 신 호를 보내게 되면 6개의 압자와 4개의 선형 모터는 동시에 측 정 부위로부터 분리되어 시작 위치로 복귀하게 되고 실험이 종료된다.
![[Fig. 7]](/xml/26139/JKROS-14-58_F7.jpg "[Fig. 7]")
Experiments of .jpgfness measurement on forearm: (a) snapshot while conducting the experiment, (b) six indentation points on the left arm
4. 실험 결과
[Fig. 8]은 피실험자 전완 측정 실험을 수행하는 약 6초 동안 센서들로부터 받아온 변위, 힘 데이터 및 식 (4)로 계산한 Fθ를 한 축에 대해서 나타낸 것이다. F의 데이터를 토대로 보면, 측 정부가 움직이기 시작하고 약 1초 후에 압자가 측정 부위와 접 촉하면서 값이 증가하는 것을 볼 수 있다. 피부 및 연조직의 변 화율 xdis는 접촉한 순간부터 측정되는 거리이다. 이번 실험에 서는 모터 데이터를 토대로 보면, 측정부가 움직이기 시작하 고 약 1초 후에 압자가 측정 부위와 접촉하면서 값이 증가하는 것을 볼 수 있다. 피부 및 연조직의 변화율 xdis는 접촉한 순간 부터 측정되는 거리이다. 이번 실험에서는 모터 축방향으로 약 10 N의 힘이 출력되도록 설정하였으며, 모터 축 방향으로 가하는 힘 F와 피부에 수직으로 가해지는 힘 Fθ를 비교해보면 약 0.5 N의 차이가 존재하는 것으로 계산된다.
![[Fig. 8]](/xml/26139/JKROS-14-58_F8.jpg "[Fig. 8]")
Experimental results obtained from the loadcell and the encoder, and Fθ implies the force of Eq. (4)
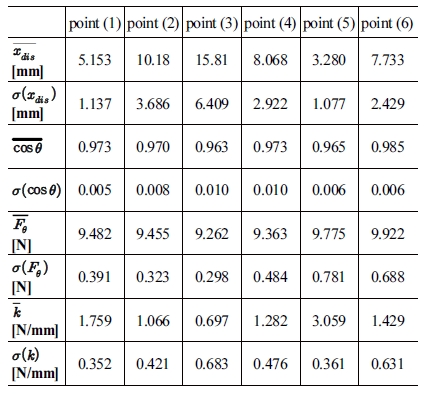
[Table 2]는 총 4명의 피실험자에게서 압자 6축으로부터 얻 은 데이터의 평균과 표준편차를 [Fig. 7(b)]의 측정 부위에 적 힌 번호 순으로 나타낸 것이다. 또한 측정 데이터 값은 천이 (transient) 상태를 거치고 난 후 정상 상태(steady-state)일 때의 값으로 제시되었다. 여기서 xdis는 피부 접촉 후 이동 거리를 나타내고, cos θ는 식 (3)으로부터 계산된 피부와 모터 축 사이 각도의 코사인(cosine) 값이며, Fθ는 식 (4)로부터 계산한 실제 피부에 압입되는 힘이다. k는 각 측정 부위의 인체 탄성도를 나타낸다. 또한 각 매개 변수의 오버 라인(over line) 표기법은 네 명의 피실험자에 대한 평균값을 나타내고, σ는 해당 매개 변수의 표준 편차를 나타냅니다. 본 논문에서 인체 탄성도는 식 (5)를 이용하여 계산되었다. 예를 들어, 탄성도가 크다면 값 이 해당 압입 부분이 상대적으로 단단하다는 것을 의미한다.
Experimental results of four subjects
실험 결과를 정리한 [Table 2] 및 [Fig. 9]를 통해 각 측정 부 위의 인체 탄성도 평균값을 비교해보면, 요골(radius), 척골 (ulna)과 가장 가까운 부위인 point (5)가 3.059 [N/mm]로 가장 단단한 부위로 나타났으며, 반대로 요골/척골과 가장 멀리 떨 어져 있는 부위인 point (3)이 0.697 [N/mm]로 가장 부드러운 부위인 것을 확인할 수 있었다. 또한 [Fig. 9]에서 보이듯이 인 체 탄성도의 평균값이 가장 낮은 부위일 때 피실험자 간의 차 이가 큰 경향이 나타났다(표준편차: 0.683). 그 이유는 사람마다 근 육, 지방과 같은 연조직(soft-tissue)과 피부 등의 두께 차이가 큰 부위이기 때문일 것이라고 추측된다. 반대로 인체 탄성도 가 가장 높은 부위일 때 피실험자 간의 차이가 적게 나타났다(표준편차: 0.361). 이것은 피부와 뼈가 다른 부위에 비해 근접해 있 어서 연조직 및 피부가 가지는 영향이 비교적 적게 나타나기 때문이라고 추측된다.
![[Fig. 9]](/xml/26139/JKROS-14-58_F9.jpg "[Fig. 9]")
Means and standard deviations of the measured .jpgfnesses at six indentation points of the left forearm as suggested in [Fig. 7]
5. 결 론
본 연구는 의수 소켓 제작을 위한 인체 탄성도 측정 장치 개 발 및 데이터 처리에 관한 것이다. 측정 시스템은 압자 6개의 측정부와 선형 서보 모터 4개의 고정부로 구성된다. 또한 측정 시 발생하는 피실험자의 움직임을 4개의 선형 서보 모터에서 예방하고자 하였고, 6개의 압자를 이용하여 60도 간격으로 인 체 탄성도를 동시 측정할 수 있도록 하였다. 측정부와 고정부 를 2층 구조로 설계하여 서로간의 간섭 효과를 최소화하였다. 압자 각 축에는 각각 엔코더, 로드셀, 2축-포텐쇼미터 총 3개의 센서를 부착했으며, 실시간으로 엔코더와 로드셀 데이터를 획 득하여 인체 탄성도 계산에 필요한 파라미터들을 얻었다. 2축- 포텐쇼미터를 수동 2 자유도 유니버설 조인트로 활용하여 압 자가 측정 부위에 수직으로 압입되도록 하였고, 각도와 전압 데이터 사이의 선형 피팅을 통해 모터 축과 압입 축 사이의 각 도를 측정하였다. 궁극적으로 탄성도를 계산할 때 변위와 같은 방향의 힘 성분으로 사용하여 탄성도 계산의 정확성을 높였다.
최종적으로 피실험자의 왼쪽 전완에 대하여 6방향의 인체 탄성도를 실시간으로 구할 수 있었다. 그러나 비교적 팔의 두 께가 얇은 피실험자에게는 압자 끝 단의 지름 크기가 맞지 않 아 불안정한 모습이 관찰되기도 하였다. 이러한 문제점들을 보완하여, 실험 대상에 대한 측정 부위를 확대하고, 인체 전완 3D-모델링에 측정 데이터를 통합하여 시각화(visualization)하 는 방법에 대한 후속 연구가 필요하다고 판단된다.
References
-
K. Ziegler-Graham, E. J. MacKenzie, P. L. Ephraim, T. G. Travison, and R. Brookmeyer, “Estimating the prevalence of limb loss in the united states: 2005 to 2050,” Archives of physicalmedicine and rehabilitation, vol. 89, no. 3, pp. 422-429, Mar., 2008.
[https://doi.org/10.1016/j.apmr.2007.11.005]

-
R. D. Alley, T. W. Williams, M. J. Albuquerque, and D. E. Altobelli, “Prosthetic sockets stabilized by alternating areas of tissue compression and release,” Journal of rehabilitation research and development, vol. 48, no. 6, pp. 679-696, 2011.
[https://doi.org/10.1682/JRRD.2009.12.0197]
-
C. Lake, “The evolution of upper limb prosthetic socket design,” JPO: Journal of Prosthetics and Orthotics, vol. 20, no. 3, pp. 85-92, Jul., 2008.
[https://doi.org/10.1097/JPO.0b013e31817d2f08]
-
N. Herbert, D. Simpson, W. D. Spence, and W. Ion, “A preliminary investigation into the development of 3-D printing of prosthetic sockets,” Journal of Rehabilitation Research and Development, vol. 42, no. 2, pp. 141-146, Mar./Apr., 2005.
[https://doi.org/10.1682/JRRD.2004.08.0134]
-
F. E. Tay, M.A. Manna, and L Liu, “A CASD/CASM method for prosthetic socket fabrication using the FDM technology,”Rapid Prototyping Journal, vol. 8, no. 4, pp. 258-262, 2002.
[https://doi.org/10.1108/13552540210441175]
-
.
[https://doi.org/10.1682/JRRD.2006.06.0069]
-
H. E. J. Meulenbelt, P. U. Dijkstra, M. F. Jonkman, and J. H. B. Geertzen, “Skin problems in lower amputees: A systematic review,” Disability and Rehabilitation, vol. 28, pp. 603-608, 2006.
[https://doi.org/10.1080/09638280500277032]
-
A. Petron, J.-F. Duval, and H. Herr, “Multi-indenter device for in vivo biomechanical tissue measurement,” IEEE Transactions on Neural System and Rehabilitation Engineering, vol. 25, no. 5, pp. 426-435, May, 2017.
[https://doi.org/10.1109/TNSRE.2016.2572168]
-
J. T. Iivarinen, R. K. Korhonen, P. Julkunen, and J. S. Jurvelin, “Experimental and computational analysis of soft tissue .jpgfness in forearm using a manual indentation device,” Medical Engineering & Physics, vol. 33, no. 10, pp. 1245-1253, Dec., 2011.
[https://doi.org/10.1016/j.medengphy.2011.05.015]
-
C. Flynn, A. Tabemer, and P. Nielsen, “Measurement of the force-displacement response of in vivo human skin under a richset of deformations,” Medical Engineering & Physics, vol. 33, no. 5, pp. 610-619, Jun., 2011.
[https://doi.org/10.1016/j.medengphy.2010.12.017]
- P. Ashrafi and E. Tonuk, “Indentation and observation of anisotropic soft tissues using an indenter device,” Journal of Natural and Applied Science, vol. 18, pp. 10-20, 2014.
- A. F. Mak, M. Zhang, and D. A. Boone, “State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: A Review,” Journal of Rehabilitation Research and Development, vol. 38, No. 2, pp. 161-173, Mar-Apr., 2001.
-
S. Lee and Y. Choi, “Wearable band sensor for posture recognition towards prosthetic control,” Journal of Korea Robotics Society, vol. 13. No. 4, pp. 265-271, Dec., 2018.
[https://doi.org/10.7746/jkros.2018.13.4.265]
-
[14] Y. Kim, J. Kim, H. Son, and Y. Choi, “Dynamic Elasticity Measurement for Prosthetic Socket Design,” 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, pp. 1281-1286, 2017.
[https://doi.org/10.1109/ICORR.2017.8009425]
- J. C. Shin, “Amputation and prosthesis,” Essential rehabilitation medicine, 2nd ed. Hanmibook, 2014, ch 4, pp. 135-148.

2017 청주대학교 전자공학과(학사)
2017~현재 한양대학교 전자공학과(석사과정)
관심분야: 로봇제어, 재활로봇

2017 한양대학교 의류학과(박사)
2017~현재 한양대학교 ERICA 공학기술연구소 연구원
관심분야: Wearable Sensor, Smart textiles, and Smart clothing design

2002 POSTECH 기계공학과(공학박사)
2002~2005 KIST 지능로봇연구센터 선임연구원
2005~현재 한양대학교 ERICA 전자공학부 교수
관심분야: 로봇제어, 생체신호처리