인명 구조용 로봇의 패들형 말단 장치 설계 및 구현

© Korea Robotics Society. All rights reserved.
Abstract
This paper deals with the paddle type end of arm tool for rescue robot instead of rescue worker in dangerous environments such as fire, earthquake, national disaster and defense. It is equipped at the dual arm manipulator of the rescue robot to safely lift up an injured person. It consists of the paddle for lifting person, sensors for detecting insertion of person onto the paddle, sensor for measuring the tilting angle of the paddle, and mechanical compliance part for preventing incidental injuries. The electronics is comprised of the DAQ module to acquire the sensors data, the control module to treat the sensors data and to manage the errors, and the communication module to transmit the sensors data. After optimally designing the mechanical and electronical parts, we successfully made the paddle type end of arm tool and evaluated its performance by using specially designed jigs. The developed paddle type end of arm tool is going to be applied to the rescue robot for performance verification through field testing.
Keywords:
End of Arm Tool, Rescue robot, Paddle Type, Sensor Module, Compliance Part1. 서 론
최근 화재, 지진과 같은 국가재난, 국방 등 위험한 환경에서 사람을 대신하여 부상자를 구조하고, 작업의 효율성을 높이는 인명구조 로봇에 대한 관심이 높아지고 있다[1-3]. 최근 이러한 임무를 수행하기 위하여 기중력 120 kg급 한국형 구난 로봇을 여러 참여 기관들이 협력하여 현재 개발 중에 있다 [Fig 1]. 한 국형 구난 로봇은 이동체 플랫폼, 양팔 매니퓰레이터, 말단 장 치, 원격 통제 장치, 및 전체 통합 제어 플랫폼으로 구성되어 있다 [4,5].

Conceptual Configuration of Rescue Robot and End of Arm Tool
기존의 인명구조 로봇은 주로 후송 작업만 담당하는 것으 로 구조 작업자가 부상자를 탐색하고 인명구조 로봇에 부상자 를 실어주면 안전한 곳으로 이동하는 임무를 수행한다[6,7]. 위 험한 환경에 투입된 구조 작업자의 안전상 위협 요소 제거를 위해 구조 작업자 없이 단독으로 부상자 구조가 가능한 인명 구조 로봇이 개발되었지만 크기가 일반 인명구조 로봇의 2배 이상으로 활용 가능한 환경이 제한적이다[8].
본 연구는 기존에 개발된 인명구조 로봇보다 다양한 환경 에서 구조 작업자의 도움없이 단독으로 부상자를 구조할 수 있는 한국형 구난 로봇 말단 장치의 설계와 구현을 수행한 결 과이다. [Fig 1]에 나타낸 바, 구난 로봇이 정의된 운용 시나리 오에 의해 안정적인 구조 작업을 할 수 있게 삽입 및 기중 (lifting)이 용이한 기구 구조물, 안전한 기중과 부수적 상해 방 지를 위한 센서 모듈 및 기구 구조물로 구성된 패들형 말단 장 치를 설계 및 제작하고 성능 검증을 수행했다.
2. 부상자 구조를 위한 말단 장치 구성 및 요구 조건
2.1 말단 장치의 구성
부상자 구조를 위한 말단 장치는 [Fig. 2]와 같이 어댑터 브 라켓, 샤프트, 전장 PCB 하우징, 전장 PCB 하우징 커버, 삽입 패들로 구성된다. 다양한 로봇과의 호환성을 위해 로봇 팔과 연결되는 어댑터 브라켓을 별도의 구성품으로 구비하였다. 로 봇 팔의 연결 구조에 따라 어댑터 브라켓만 일부 변경하여 적 용이 가능하다. 전장 PCB 하우징은 전원공급과 CAN 통신 메 시지 전달을 위한 PCB를 구성품으로 구비하였다. 이와 더불 어 하우징 상부에 어댑터 브라켓을 힌지(hinge)구조 샤프트로 연결하여 말단 장치와 부상자가 접촉할 때 부수적 상해를 방 지할 수 있는 컴플라이언스(compliance)를 구현하였다. 삽입 패들은 부상자 구조를 위해 부상자와 지면 사이의 협소한 공 간에 삽입되는 가장 중요한 구성품으로 안전하고 쉽게 완전히 삽입이 이루어져야 한다.

Structure of the Paddle Type End of Arm Tool
2.2 말단 장치의 요구 조건 및 기구 설계
한국형 구난 로봇에 장착하여 여타의 구조요원의 도움 없 이 로봇이 단독으로 부상자를 구조할 수 있는 패들형 말단 장 치의 요구 조건을 제안하고 이에 따라 설계하였다. 구난 로봇 의 운용 시나리오는 Task1,2,3으로 구분하였다. Task1은 부상 자와의 일정거리를 유지한 상태에서 로봇의 상체를 앞쪽으로 기울고, Task2는 지면에 누워있는 사람에게 팔을 접근시킬 때 팔이 지면과 수평을 이루도록하고, Task3은 로봇의 무게중심 이 가운데 유지될 수 있도록 하는 3단계의 시나리오로 운용된 다[9]. 말단 장치는 삽입 성공 여부를 검출하기 위한 삽입 확인 센서 모듈, 부상자의 부수적 상해 방지를 위한 컴플라이언스 구조물, 그리고 로봇의 전신 동작 제어를 통해 구조 작업을 원 활히 하기 위한 로봇 팔과 말단 장치 사이의 상대적 경사도를 측정하기 위한 기울기 센서 모듈이 필수적이다.
패들을 부상자와 지면 사이로 삽입할 때 지면의 형태,토질 등 불확실한 환경적 요인들로 인해 패들이 부상자의 몸통 등 에 과도한 힘으로 직접 접촉하여 부상자에게 부수적인 상해가 발생할 여지가 있다. 이를 방지하기 위해 [Fig. 3]과 같이 삽입 확인 센서 모듈을 패들 선단(先端)좌우측에 각각 1개씩을 구 비하였다. 삽입확인 센서 모듈은 외부 힘에 의하여 변형이 되 고 힘이 제거되었을 때 원래대로 되돌아가는 금속 탄성체와 소형 스위치로 구성된다. 정상적인 삽입이 시작되면 부상자의 무게에 의해 탄성체가 변형되면서 스위치를 작동시켜 연결된 케이블을 통해 전장 PCB의 DAQ 모듈로 삽입 여부 정보가 로 봇 통합 제어 플랫폼으로 전달되고 또한 원격지의 로봇 운전 자에게 전달된다. 케이블 외부 노출로 인한 손상을 방지하기 위하여 패들 하단 부분에 케이블 포설(cable installation guide) 이 가능한 구조로 설계한다.

Sensor for detecting insertion of person onto the paddle
또한 운용 시나리오대로 부상자와 일정 간격을 유지한 상 태에서 구조 작업이 이루어져야 하며, 로봇 팔에 결합된 패들 을 지면으로 하강할 때 원격지의 운전자에게 시야가 확보되지 않아 패들이 부상자를 압박하여 상해가 발생할 여지가 있어, 이를 방지할 수 있는 중력방향 컴플라이언스 구조를 구비했 다. [Fig. 4]와 같이 전장 PCB 하우징과 어댑터 브라켓을 샤프 트로 힌지 연결하는 구조로 구현했다.

Sensor for measuring the tilting angle of the paddle and gravitational compliance part for preventing incidental injuries
한국형 구난 로봇의 모션제어를 위해 패들형 말단 장치의 중력방향 컴플라이언스에 따른 회전 자유도 기울기 정보가 필 요하다. 삽입 패들과 동일한 기울기를 갖는 전장 PCB에 기울 기 센서를 구비하고, 측정된 기울기 정보는 DAQ 모듈 및 통신 모듈을 통해 로봇 통합 제어기 및 원격 운전자에게 전송된다.
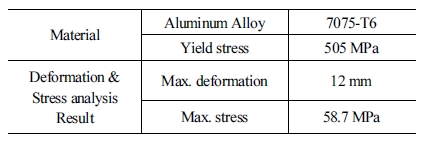
삽입 패들을 부상자와 지면 사이로 안전하고 쉽게 완전히 삽입하기 위해 패들의 폭과 두께를 결정하는 것이 중요하다. 얇은 두께와 좁은 폭의 형상에 가까울 수록 완전 삽입 가능성 이 높아짐과 동시에 패들의 변형량이 커지거나 항복 응력에 도달하여 파단에 이를 가능성이 높아진다. 삽입확인센서 모 듈, 스위치 및 케이블 포설이 가능하면서 각각의 말단 장치 윗 면에 60 kgf의 분포 하중을 견디는 최적화 설계를 진행한 결과 패들의 두께를 10 mm, 폭을 200 mm로 선정했다. 이 설계 조건 으로 [Fig. 5]와 같이 변형량 및 응력 해석을 진행한 결과는 [Table 1] 과 같다. 최대 변형량은 패들의 선단부분에서 12 mm, 최대 응력은 최적화 두께 10 mm가 시작되는 패들의 목 부분에 서 58.7 MPa로 분석되었다. 현재 개발중인 한국형 구난 로봇 의 이동체 플랫폼과 양팔 매니퓰레이터의 수직자유도에서 12 mm 변형량은 상쇄가능하고, 삽입 패들을 항복 응력이 505 MPa인 7075-T6재질로 제작 시 충분한 안전율 확보 가능한 설계임을 확인할 수 있다.

Deformation & Stress analysis of the designed paddle type end of arm tool

Result of deformation & stress analysis
2.3 말단 장치 전장 설계
말단 장치 전장은 크게 3개로 구성되며 스위치와 기울기 센 서 정보를 받기 위한 DAQ 보드, 말단 장치의 센서 정보 처리 및 에러 관리를 위한 제어 보드, 그리고 이더켓(EtherCAT) 통 신을 위한 통신 보드이다 [Fig. 6]. 두께가 얇은 말단 장치에 전 장을 장착하려면 공간을 효율적으로 사용해야 하는 바, 세 가 지 보드를 하나로 통합해 구성했다 [Fig. 6(d)].

(a) DAQ board, (b) Control board, (c) EtherCAT board, (d) Assembly board
로봇 팔로 연결된 24 V 전력선과 호환되도록 전력 배선을 구성하고, 로봇 통합 제어 플랫폼에 정보 전송을 위한 고속 통 신이 가능한 이더켓 포트를 구비했다. [Fig. 7] 에 전장 배선 구 성을 표시한다. 24 V는 보드 전원을 위해 5 V와 3.3 V로 변환 된다. 보드 간 통신은 SPI 통신을 이용하고 센서 DAQ에서 읽 은 기울기 센서와 스위치 센서 정보는 통합 제어 모듈에서 처 리한 후 이더켓 통신을 통해 로봇 통합 제어 플랫폼으로 전송 된다.

Electric interface of paddle type end of arm tool
3. 인명구조 말단 장치 제작 및 성능 검증
3.1 말단 장치 제작
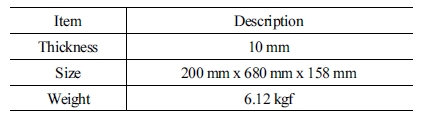
두께 최적화를 통한 말단장치를 제작했다 [Fig. 8]. 말단 장 치는 10 mm 두께, 200 mm x 680 mm x 158 mm 크기와 6.12 kgf 중량으로 120 kgf의 부상자와 지면 사이에 완전 삽입과 기중 이 가능하다 [Table 2].

Prototype of arm tool
Specification of arm tool
3.2 말단 장치 성능 검증
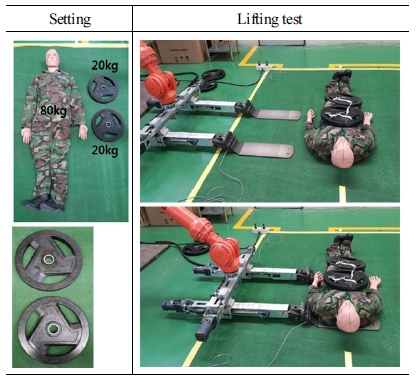
부상자 구조 성능 시험에 80 kgf의 인체 더미(dummy)와 40 kgf 의 추가 중량물을 사용했다. 이 때 평지에 반듯하게 누워있는 120 kgf의 부상자와 지면 사이를 말단 장치가 삽입해 부상자 를 기중하는 구조 시나리오에 따라 말단장치와 6축 다관절 로 봇을 연결하기 위한 양팔형 인터페이스를 제작하여 테스트 베 드를 구축해 시험에 활용했다 [Fig. 9].

Test bed for rescue scenario by the paddle type end of arm tool
말단 장치 삽입(insertion) 및 기중(lifting) 성능 시험 항목을 다음과 같이 3개로 정의한다.
- · 120 kgf 피험체와 지면 사이 삽입 시험
- · 120 kgf 피험체 기중 시험
- · 삽입 및 기중에 따른 파손(damage) 검사
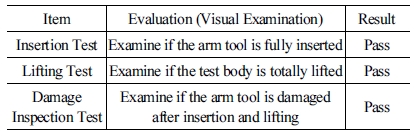
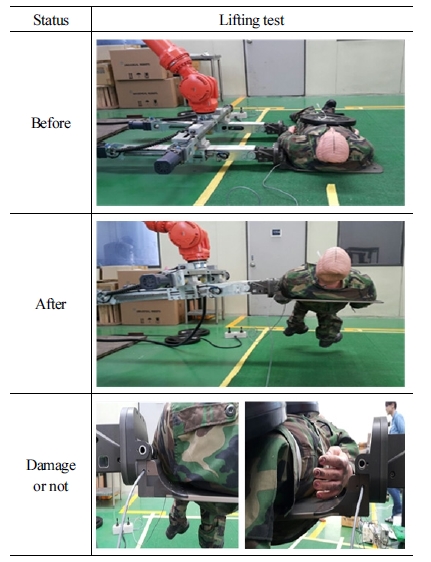
말단 장치 삽입 및 기중 성능 시험 결과를 [Table 3]에나타 낸다. 말단 장치 삽입 시험에서 120 kgf 피험체의 밀림현상을 판별하기 위해 인체 더미 머리의 중앙과 일치하도록 지면에 노란 마크를 표식해 밀림에 의한 위치 변경을 확인했다. [Table 4] 와 같이 삽입 전(前)과 후(後)에 밀림현상 없이 피험체의 위치 가 변동이 없음을 확인했다. 또한 기중 시험과 말단 장치 삽입 패들의 파손여부시험을 동시에 진행했다. 최적화 설계에 따른 응력 해석 결과 10 mm 두께가 시작되는 패들의 목 부분에 가 장 큰 응력이 가해지는 분석결과를 기반으로 삽입 후 기중 시 험을 10분 동안 유지한 후 육안으로 말단 장치 파손이 없음을 확인했다 [Table 5].
Test results of performance of the paddle type of end of arm tool
Test results of insertion test
Results of lifting and damage test
삽입 확인 센서 성능 시험을 위해 [Fig. 10]과 같이 일정 압 력으로 가압이 가능한 테스트베드를 구비해 삽입 확인 센서의 동작 여부를 10회 반복 시험하여 삽입 확인 센서가 100% 동작 함을 확인했다 [Table 6].

Test bed of insertion check sensor test
Test result of insertion check sensor
[Table 4]와 같이 말단 장치 삽입 시험에서 삽입 확인 센서 동작 여부를 확인했다. 말단 장치는 오른쪽(RIGHT1,2), 왼쪽 (LEFT1,2) 각각 2개의 삽입 확인 센서 모듈이 구비되어 총 4개 의 센서 모듈이 장착된다. 오른쪽, 왼쪽 삽입 패들은 중심을 기 준으로 750 mm 간격을 유지하고, 오른쪽 삽입 패들의 RIGHT 1이 피험체의 어깨(견갑골)에 위치시키면 왼쪽 삽입 패들의 LEFT 1은 피험체의 엉덩이에 위치하게 된다. [Fig. 11]의 RIGHT/ LEFT Insertion check sensor의 RIGHT 1, 2 / LEFT 1, 2 는 삽입 패들 앞 부분에 장착된 2개 센서의 동작 안됨(0), 동작 됨(1) 상 태를 나타낸다. RIGHT 1은 어깨(견갑골)위치로 2회의 센서가 동작하고, RIGHT 2는 목 뒷 부분의 빈 공간에 위치함에 따라 센서가 동작하지 않는 것을 확인했다. LETF 1은 엉덩이의 중 심부, LEFT 2는 허리에 위치함에 따라 센서 동작 시점이 다른 것을 확인했다.

Signals of Insertion check sensor
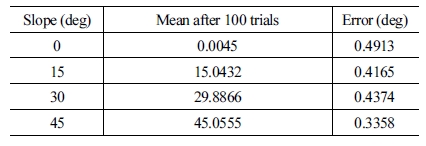
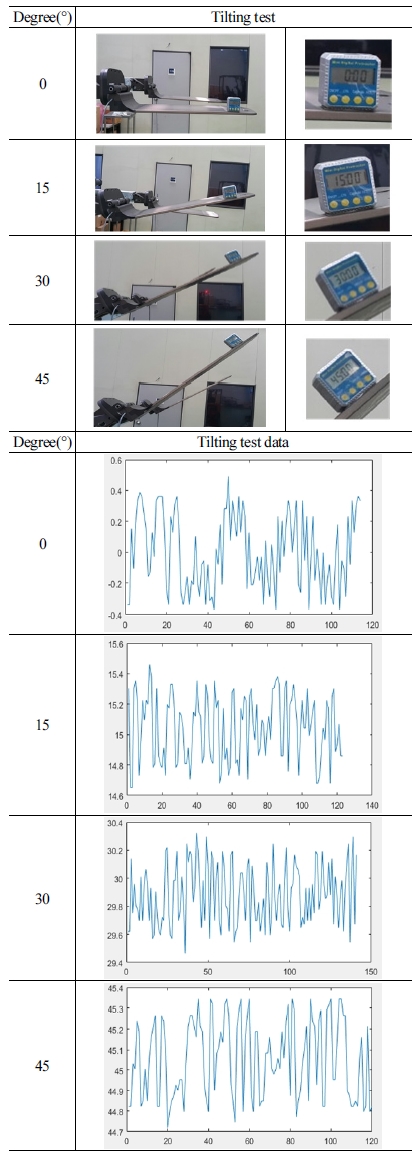
기울기 확인 센서 성능 시험을 위해 [Fig. 12]와 같이 테스트 베드를 구비하고, 말단 장치의 패들에 디지털각도기를 부착하 여 기울기 각도를 0°, 15°, 30°, 45°일 때 기울기 확인 센서의 동 작 여부 및 오차를 확인했다.

Test method of tilting check sensor test
기울기 확인 센서 성능 시험 결과는 [Table 7]과 같다. 각도 별 100회 데이터 분석결과 오차율은 0.50° 미만으로 [Table 8]과 같 다. [Table 9]는 측정 기울기 각도 별 데이터를 그래프로 나타낸 결과이고, 그래프는 측정 횟수와 기울기 값을 나타낸다.
Test result of tilting check sensor
Test result of tilting check sensor
Results of tilting check sensor test
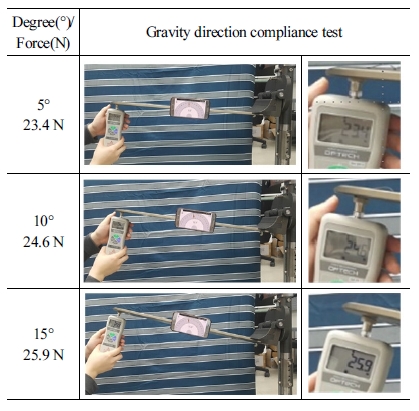
중력방향 컴플라이언스 성능 시험과 동시에 말단 장치와 요 구조자가 접촉할 때 요구조자에게 전달되는 힘을 확인했다. 말 단 장치의 패들에 디지털각도기를 부착하여 기울기 각도 0°, 5°, 10°, 15°일 때 선단에서 풀 푸쉬게이지를 이용하여 힘을 측정 했다.
중력방향 컴플라이언스 성능 시험 결과는 [Table 10]과 같 다. 중력방향 컴플라이언스 동작에 문제없음을 확인하였고, 기울기 각도 별 선단에서 전달되는 힘 측정 결과 [Table 11]과 같다.
Test result of gravity direction compliance
Results of gravity direction compliance test
4. 결 론
본 논문은 화재, 지진과 같은 재난이나 전쟁과 같은 위험한 환경에서 구조 작업자의 도움없이 로봇 단독으로 요구조자를 구조가능하도록 최적화된 말단 장치로서 패들형 말단 장치의 구현 및 적용에 대한 연구이다. 정의된 구조 시나리오에 의해 개발 중인 로봇에 상응하는 말단 장치의 필요 성능을 식별하 여 삽입 확인 센서, 기울기 확인 센서, 중력방향 컴플라이언스 등을 구비한 패들형 말단장치의 기구 및 전장 설계를 실시하 고, 120 kgf의 부상자와 지면 사이의 완전한 삽입과 삽입 이후 기중을 위해 말단 장치의 최적화 설계를 진행했다. 최적화 설 계를 기반으로 두께 10 mm인 패들형 말단 장치를 제작했다. 말단 장치의 삽입과 기중 시험 테스트 베드를 구축해 성능 실 험을 실행하여 성능을 검증했다. 앞으로 구현된 패들형 말단 장치를 개발 중인 구조 로봇에 결합하여 삽입과 기중 시험을 실시하고 이 때 센서 신호 및 명령 신호의 실시간 전송 및 실행 여부를 검증할 예정이다.
Acknowledgments
This research was supported by a grant for the project managed by Agency for Defense Development, “Technology development for a rescue robot capable of lifting over 120kgf” funded by Civil-Military Dual-use Technology Program.
References
-
J. Casper and R. R. Murphy, “Human–Robot Interactions During the Robot-Assisted Urban Search and Rescue Response at the World Trade Center,” IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), vol. 33, no. 3, pp. 367-385, June, 2003.
[https://doi.org/10.1109/TSMCB.2003.811794]

-
J. Hu, A. Edsinger, Y.-J. Lim, N. Donaldson, M. Solano, A. Solochek, and R. Marchessault, “An advanced medical robotic system augmenting healthcare capabilities - robotic nursing assistant,” 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, pp. 6264-6269, 2011.
[https://doi.org/10.1109/ICRA.2011.5980213]
- A. Ko and H. Y. K. Lau, “Robot Assisted Emergency Search and Rescue System With a Wireless Sensor Network,” International Journal of Advanced Science and Technology, vol. 3, pp. 69-78, February, 2009.
-
W. Lee, Y. Lee, G. Park, S. Hong, and D. Kim. “Realtime Tele-operation of a Rescue Robot (HURCULES) by Robust Whole-body Control,” Journal of Institute of Control, Robotics and Systems, vol. 23, no. 12, pp. 1070-1076, December, 2017.
[https://doi.org/10.5302/J.ICROS.2017.17.0137]
-
J. H. Choi, J. An, S. M. Lee, and M. E. Jang, “Slip Considered Design and Analysis Pincers-type Gripper for Seizing Heavyweighted Cylindrical Objects,” Journal of Korea Robotics Society, vol. 10, no.4, pp. 193-199, December, 2015.
[https://doi.org/10.7746/jkros.2015.10.4.193]
-
H. Miura, A. Watanabe, S. Suzuki, and M. Okugawa, “Field experiment report for tunnel disaster by investigation system with multiple robots,” 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, pp. 276-277, 2016.
[https://doi.org/10.1109/SSRR.2016.7784313]
- B. Chandrasekaran and J. M. Conrad, “Human-robot collaboration: A survey,” SoutheastCon 2015, Fort Lauderdale, FL, USA, pp. 1-8, 2015.
-
K. Miyazawa, “Fire robots developed by the Tokyo Fire Department,” Advanced Robotics, vol. 16, no. 6, pp. 553-556, 2002.
[https://doi.org/10.1163/156855302320535953]
- W. Lee, Y. Lee, G. Park, S. Hong, B. Choi, and Y. Kang, “Motion Control for a Rescue Robot using Robust Task-Priority Algorithm,” Institute of Control, Robotics and Systems Conference, Daejeon, Korea, pp. 502-503, 2015.

2012 영남대학교 기계공학과(학사)
2012~2016 대우조선해양 설계원
2016~현재 대구경북과학기술원 연구원, 경북대학교 기계공학과 석사과정 재학 중
관심분야: 국방사회안전로봇, 재활로봇, 로보틱스

2013 경북대학교 전자공학과(학사)
2015 포항공과대학교 전자공학과(석사)
2015~현재 대구경북과학기술원 연구원
관심분야: 임베디드 시스템, 로봇핸드 제어

1993 성균관대학교 기계공학부(학사)
1997 KAIST 제어공학(석사)
2005 KAIST 로봇공학(박사)
2005~2007 광운대학교 정보제어공학과 교수
2008~현재 대구경북과학기술원 책임연구원
관심분야: 국방사회안전로봇, 재활로봇