복합 재난을 위한 장갑형 로봇의 차체 설계

© Korea Robotics Society. All rights reserved.
Abstract
In this paper, a design for a vehicle body of an armored robot for complex disasters is described. The proposed design considers various requirements in complex disaster situations. Fire, explosion, and poisonous gas may occur simultaneously under those sites. Therefore, the armored robot needs a vehicle body that can protect people from falling objects, high temperature, and poisonous gas. In addition, it should provide intuitive control devices and realistic surrounding views to help the operator respond to emergent situations. To fulfill these requirements of the vehicle body, firstly, the frame was designed to withstand the impact of falling objects. Secondly, the positive pressure device and the cooling device were applied. Thirdly, a panoramic view was implemented that enables real-time observation of surroundings through a number of image sensors. Finally, the cockpit in the vehicle body was designed focused on the manipulability of the armored robot in disaster sites.
Keywords:
Disaster Robot, Armored Robot System, Panoramic View, Cockpit1. 서 론
복합 재난은 다양한 형태의 재난이 동시 다발적으로 발생 하는 상황을 의미한다[1]. 이는 단순 화재로 시작하여 붕괴로 이어지고, 붕괴가 유독가스를 배출하고, 유독가스가 다시 화 재를 일으키는 것과 같은 형태로 전개된다[Fig. 1]. 이천 냉동 창고 화재(2008년), 구미 불산 누출사고(2012년), 울산 현대중 공업 폭발사고(2014), 여수산단 석유화학공장 화재(2017년) 등이 복합 재난에 해당한다.

Analysis of complex disaster situations: collapse, fire, explosion and poisonous gas occur simultaneously.
기존의 재난 대응 로봇으로는 KAIST의 화재진압용 소방로 봇(한국), LUF 60(독일), 동경소방서의 Robot Q(일본), ㈜동일 파텍의 실외화재 탐색로봇(한국)[2], 베크나사의 베어(미국), ADD의 구난로봇(한국)[3] 등이 있다[Fig. 2]. 하지만 기존 로봇 들은 단순 원격 방수 기능만 있거나, 낙하물과 유독가스로부 터의 보호기능이 고려가 안 된 인명 탐색/구조 로봇에 해당한 다. 그 외 특수 목적으로 사용되는 굴삭기, 브레이커와 같은 장 비는 현장 대응을 위한 기능이 아닌, 사후 복구 기능만 가지고 있다. 따라서 소방대원의 지원 및 탑승자 보호 기능을 동시에 갖추고 복합 재난 현장에 대응할 수 있는 시스템 개발이 필요 하다[4,5].

Existing disaster response robots: KAIST fire-fighting robot, LUF 60, Robo Q, Fire-searching robot, BEAR, Rescue robot.
본 논문에서는 복합 재난 사고 현장에서 실내 진입대원의 인명보호 및 방재작업 지원을 위한 장갑형 로봇 시스템을 소 개한다[Fig. 3]. 특히 낙하물, 유독가스, 고온으로부터 탑승자 를 보호할 수 있으면서도 소방관의 시야를 확보하고 조종을 쉽게 하기 위한 차체에 대해 기술한다.

The armored robot consists of a vehicle body, crawlers, hydraulic arms with work tool and a water cannon; the bottom figure shows a detailed description of the vehicle body of the armored robot.
이를 위하여, 차체 프레임 설계 과정에서 낙하물에 의한 충 격 해석을 고려하였을 뿐 아니라, 프레임 시제를 제작하고 낙 하물 실험을 하여 검증과정을 수행하였다. 차체 구성요소에는 양압 및 냉각 시스템을 포함시켰으며, 이들 각각을 개발하여 단품 레벨에서 성능 시험을 진행하였다.
개발하려는 장갑형 로봇 시스템은 농연이 가득찬 상황에서 차체 내부에 있는 구조대원이 외부상황을 파악할 수 있도록 실감 있는 영상 정보를 제공하고 편리한 조작 인터페이스가 갖춰져야 한다. 그리하여 복수개의 영상 센서를 부착하여 비 전 처리 알고리즘을 통해 파노라믹 뷰를 생성하였다. 마지막 으로 인체공학적 설계를 통해 사용자의 조작성 및 편의성을 갖춘 조종석을 차체 내부에 구성하였다[Fig. 3].
2. 장갑형 로봇 시스템의 미션 시나리오
화재 등으로 인한 복합 재난 상황이 발생할 경우, 장갑형 로 봇 시스템은 상황에 따라 원거리에서 방수포를 통해 화재 진 압을 수행하거나[Fig. 4-(a)] 구조를 위하여 건물 내에 진입하 게 된다. 이 때 유압 팔은 벽면 파괴, 장애물 제거 등을 수행하 며 진입로를 확보함으로써 차량이 재난 현장에 들어갈 수 있 도록 한다[Fig. 4-(b)]. 현장 진입에 성공하게 되면 소방대원이 장갑형 로봇에서 내려서 구조작업을 시작한다[Fig. 4-(c)]. 이 때, 장갑형 로봇은 건물 안에 대기하고 있으면서, 건물 붕괴 등 의 위급상황 발생 시 소방대원들이 피신할 수 있는 베이스 캠 프의 역할을 수행한다.

Mission examples of the armored robot (a) Remote fire suppression using water cannon (b) Entry into the building after obstacle removal using hydraulic arms (c) Rescue requester after entering.
3. 외부 환경으로부터의 보호 기능 구현
장갑형 로봇의 탑승자 보호를 위해 고려해야 할 위험요소 는 낙하물, 유독가스 및 고온 등이 있다. 탑승자 보호 기능을 구현하기 위해 차체 프레임이 내충격 기능을 가지도록 설계하 고, 양압 장치와 냉방 장치를 차체 내에 탑재 할 수 있는 구조로 설계하였다.
3.1 내충격 차체 프레임
차체 프레임에 대한 내충격성 기준은 KS-B-ISO-3449의 FOPS (Falling Object Protection System) 규정을 통해 산출하 였다. 규정에 기반하여, 4 m 높이의 250 kg의 추를 차체에 낙하 시켜 충돌시키고, 이 때 발생한 차체의 변형이 내부 인체 모형 DLV (Deflection Limit Volumn)까지 침투 되었는지의 여부 및 차체의 크랙 발생 여부를 통해 내충격성을 평가하였다.
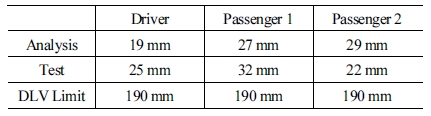
차체 프레임의 내충격 확보를 위한 소재는 스웨덴 SAAB사 의 고장력 강판(Domex 700 MC)을 사용하였으며, 강성 확보 를 위한 용접구조물을 적용하였다. 상용 S/W인 ANSYS를 활 용하여 내충격성 평가 기준과 동일한 조건의 해석이 설계 과 정 중 이루어졌다. 차체의 최종 설계에 대한 해석 결과는 [Fig. 5] 에 도시하였다. 설계 완료 후에는 시제를 제작하여 [Fig. 6]과 같이 충돌 실험을 수행하였다. 충돌 실험에 의한 결과는 해석 결과와 함께 [Table 1]에 보였다. 해석과 실험에 의한 경우 모 두 변형량이 DLV Limit보다 작으므로 낙하물이 떨어지더라 도 차체 프레임이 탑승자의 위치까지 변형이 진행되지 않아 안전함을 의미한다.

Rescue requester after entering

FOPS test for the body frame of the armored robot

Deflection comparison between analysis and test
3.2 양압 장치 및 냉방 장치
양압 장치는 공기를 주입함으로써, 화재현장에서 차량 내 부의 압력을 외부 대기압보다 높게 유지하는 장치이다. 이로 써 외부의 연기 및 오염물질의 진입을 방지하고 탑승자들에게 청정한 공기를 공급할 수 있게 된다[Fig. 7]. 개발된 양압 장치 의 사양은 군용 장갑 차량에 쓰이는 규격을 적용하였는데, 실 내 인원 1인당 25 m3/hr 공기 유량을 공급하는 것이다. 장갑형 로봇은 4인이 탑승하는 것을 기준으로 설계되었기 때문에 차 체에서는 100 m3/hr의 유량을 공급하는 양압 장치가 필요하다.

Configuration of the positive pressure system
냉방 장치는 화재현장에서 차량의 내부 온도의 상승을막고 목표 온도를 유지함으로써 고온에 의한 기기 파손 및 탑승자 의 피해를 방지하고 쾌적한 임무수행 환경을 조성하기 위한 장치이다[Fig. 8]. 차체 탑재를 위해 개발된 냉방 장치는 외부 에서 500°C 의 복사열이 가해질 때 실내온도를 60°C 가 되도 록 유지하는 것을 목표로 하고 있다.

Configuration of the air conditioning system
제작된 양압 및 냉방 장치에 대한 시험에는 칼로리미터가 이용되었으며 [Fig. 9], [Fig. 10], 본 장비를 통해 양압 장치의 유량 및 냉방 장치의 일률 측정이 가능하다. 시험을 통해 측정 된 양압 장치의 유량은 143 m3/hr 이었으며, 이는 설계 목표에 부합되는 결과이다. 냉방 장치는 5 Kw의 성능을 낼 수 있는 것 으로 판별되었는데 이는 목표 성능에 대한 간접적인 수치에 해당한다. 향후 500°C 복사열을 가하면서 목표 온도 60°C 를 유지할 수 있는지에 대한 검증을 진행할 예정이다.

Test of the positive pressure system

Test of the cooling system
4. 파노라믹 뷰 생성
차체 외부에 다수의 영상 센서를 부착하고 이로부터 얻어 진 영상들을 이어 붙여 하나의 영상으로 생성하였는데[6,7], 이 를 파노라믹 뷰라고 한다. 파노라믹 뷰는 현실감 있는 외부 영 상을 제공함으로써 조종자가 위급 상황에서 빠르게 대처를 할 수 있도록 보조해 주는 역할을 한다.
실시간 파노라믹 영상 생성은 카메라의 초점이 동일한 다 수 카메라에 의해 취득된 영상에 대해서 영상 warping만으로 시차(parallax)문제 없이 생성 가능함이 알려져 있다[7]. Kim등 은[8] 영상의 baseline과 장면과의 거리에 따라 발생되는 시차 를 정의하고 parallax-free 영상을 얻기 위한 조건을 정량화 하 였다. 그러나 본 연구에서의 카메라는 대형 차량의 주변에 비 교적 적은 수가 배치되므로, 시차에 의한 이중 영상 효과를 해 결하기 어렵다.
4.1 카메라 시스템 캘리브레이션
본 연구에서는 차량 주변으로 상호 고정된 카메라 set에 대하 여 파노라믹 영상을 생성하고자 하였으며 이를 위해 서로 Field-of-View가 겹치지 않는 다수의 카메라 간의 위치 관계를 얻는 캘리브레이션 과정이 필요하다[9]. 이 과정은 다중 카메라 시스템이 공유할 수 있는 단일 coordinate frame에서의 3차원 모 델점과 이를 관찰한 대응점을 얻을 수 있는 경우 쉽게 구할 수 있는데, 대형 차량의 주변에 배치된 카메라 시스템에 대해 이를 구현하기 위해서는 1) 대형 차량의 카메라로 볼 수 있는 거대한 3차원 구조물 및 2) 구조물에 존재하는 3차원 모델점의 정밀 위 치를 얻을 수 있어야 하며, 이는 비용이 매우 많이 드는 방법이다.
본 연구에서는 Visual SLAM의 기법[10]을 응용하여 [Fig. 11] 과 같이 그 위치를 미리 알지 못하는 다수의 평면 패턴을 카메 라 주변에 위치시키고, 관찰된 패턴의 위치와 카메라의 상호 위치를 추정한다. 우선 개별 카메라의 intrinsic parameter를 추 정한 후, 두 개의 패턴이 보이는 카메라 view를 찾아 sequential estimation하여 초기 해를 구한다. 최종적으로 카메라 내부 변 수, 패턴의 6자유도 자세, 카메라의 상호 자세 및 카메라 zig의 자세를 모두 최적화 파라미터로 설정하고 재투영오차를 최소 화하는 최적화를 수행한다. 이 때 n 자세의 영상을 m개의 pattern, c개의 카메라로 취득하는 경우 11 c+6 m+6 n+6(c-1) 자유도의 최적화 문제를 푸는 것이며, 이는 Levenberg-Marquardt 방법 등의 최적화 방법을 이용하여 구할 수 있다. [Fig. 12]의 왼쪽은 두 패턴 씩 연결하여 얻은 초기 위치이며, 오른쪽은 최적화를 통해 얻은 결과이다. 최적화를 통해 패턴의 위치와 카메라의 상대 위치가 잘 얻어지며 최종 재투영오차는 1.9pixel이다.

Calibration patterns for multi-camera calibration. The relative poses between patterns are not known in advance

Initial (Left) and final (Right) poses of cameras and patterns used in the calibration
4.2 Cylindrical warping을 통한 파노라믹 뷰 생성
차량 주변 외벽에 상호 고정된 카메라는 상호간 초점이 상 이할 수 밖에 없다. 따라서 일반적으로 적용되는 cylindrical warping을 직접 적용할 수 없다. 본 연구에서는 camera zig의 중심에 cylinder 중심을 두고 각각의 영상을 정해진 거리에 장 면 점들이 있다고 가정하고 미리 projection해두어 pre-warping map을 구성하였다. 따라서 실린더 영상 중심과 실제 카메라 중심이 상이하고 이에 의해 이중 영상이 생성될 수 있으나 미 리 정해진 pre-warping map을 사용하므로 매우 빠른 파노라믹 뷰 영상 생성이 가능하다.
[Fig. 13]은 구현된 파노라믹 뷰의 예를 보인다. 이 경우 1200x800의 해상도를 가지는 세 장의 영상을 하나의 실린더 파노라마 영상으로 구성하는 예를 보였으며 이 때 출력 영상 은 화소 당 0.1도의 각 해상도를 가지도록 설정하여 3600x500 의 해상도를 가진다.

Three input images (Top) and the generated panoramic image.
위와 같은 설정에서 6대의 카메라로 취득한 영상을 합성하 는데, Intel i7 프로세서와 NVidia GeForce 1080 그래픽카드를 사용한 경우 40 fps의 처리속도를 보인다.
5. 조종석 설계
5.1 설계 조건
장갑형 로봇으로 성공적으로 임무를 수행하려면 조종석 설 계 과정에서 사용자의 운용 요구조건 및 편의성, 안전성을 충 분히 반영해야 한다. 또한 협소한 차체 내부공간에 조종석을 배치해야 한다. 본 연구에서는 기존 유사시스템의 계기와 조 작기[11,12] 및 공간에 대한 설계 자료[13], 규격과 지침[14] 등을 참 고하였다. 그리하여 참고한 기존 연구 사례들 중 장갑형 로봇 에 적용 가능한 사항들을 활용하였다.
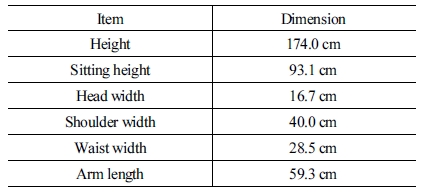
인체공학적 설계를 통해 사용자의 편의성을 확보하기 위해 서는 탑승할 조종자의 체형을 고려하여 조종석이 설계되어야 한다. 본 연구에서는 [Table 2]의 한국 남성 평균 체형을 기준 으로 조종석 설계를 진행하였다[15].
Pilot’s body dimensions
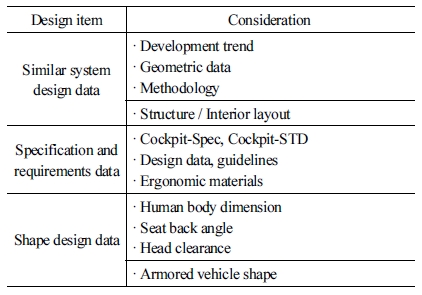
조종석 형상 설계를 위한 세부 인자는 [Table 3]와 같고, 설 계 요구조건들을 근간으로 유사시스템의 데이터 분석을 하였 다. 이를 통해 협소한 공간에서 최적화 하기 위한 치수 선정을 하였다.
Shape design factor of cockpit
또한 전방 모니터링 디스플레이 각도, 조종석 높이 및 기울 기, 인체측정치수, Head Clearance, Vision, Seat Back Angle과 같은 형상 설계요소간의 결합 시 나타나는 문제점을 판별하였 다. 그리하여 공간설계요소와 신체요소간의 상호작용이 원활 하도록 설계하였다.
각종 패널과 주요 조작기를 최적 위치에 배열하기 위해, 운 용 요구조건과 요소 부품 공급업체의 데이터를 검토하여 설계 했다. 이후 시나리오 임무 분석을 통하여 조종석 배열 업무를 수행하였다. 이때 조종자의 동작 형태별 사용 순서 및 빈도, 중 요도를 고려하여 조종자의 Scanning에 최적화된 배열이 되도 록 하였다.
5.2 구성요소
조종석에는 다관절로 이루어진 외골격 형태의 원격제어 마 스터 장치를 적용하였다. 앞서 기술된 미션 시나리오를 수행 하는 과정에서 유압 팔을 이용해 건물 벽면의 특정 부위를 파 괴하거나, 장애물을 파지하여 제거하는 것과 같은 세부 작업 이 요구된다. 이 같은 작업을 위해 일반적인 조작 장치로 2개 의 6 DOF 유압 팔을 조종하는 것은 보통의 소방대원에게 쉬운 일이 아니다. 이 때 직관적인 조작을 위해 외골격 형태의 마스 터 장치를 채택하였다. 마스터 장치의 어깨부위 폭은 사용자 신체 치수에 맞게 위치 조정이 가능하도록 설계하였다.
전방 패널의 조작거리 및 조종간의 위치는 좌석 기울기와 조종자의 체형에 큰 영향을 받는다. 기존 유사시스템의 조종 석 배열을 기준으로, 실측 된 위치에 스틱을 배치 후 조종자가 하방 시야 각 15°를 확보할 수 있는 거리 및 높이로 좌석을 배 치하였다. 또한 임무 수행 시 사용 빈도가 높은 작업을 빠르고 쉽게 사용할 수 있도록 단축 명령 수행을 위한 매크로 버튼을 배치하였다.
15인치 디스플레이 3개를 이용하여, 농연환경에서 360°범 위의 외부 시야 분석을 위한 파노라믹 뷰와 원격제어 마스터 장치에 의해 동작되는 유압 팔의 작업 상황을 모니터링할 수 있는 시스템을 구성하여 조종자가 주변 환경을 잘 인지할 수 있도록 하였다.

6. 결 론
복합 재난 대응을 위한 장갑형 로봇의 차체 설계를 수행하 였다. 차체 프레임의 해석 및 시제를 통한 실험을 통해 낙하물 로부터 탑승자 보호가 가능한 프레임 설계를 구현하였다. 또 한 유독가스 및 고온으로부터 보호를 위해 차체에 적용할 양 압 및 냉방 장치를 개발하였으며 각각에 대한 단품 테스트를 수행하였다. 마지막으로, 현장의 위급한 상황에서 조종자가 직관적이고 빠르게 대응할 수 있도록 하기 위해 파노라믹 뷰 를 생성하여 제공하는 한편 조종석 부분에서는 인체공학적인 요소를 고려한 설계를 진행하였다. 본 연구를 통해 얻어진 결 과는 향후 복합 재난 상황에 투입될 장갑형 로봇시스템의 탑 승자 안전 및 직관적인 조종 기능 개발에 사용할 예정이다.
Acknowledgments
This material is based upon work supported by the Ministry of Trade, Industry & Energy(MOTIE, Korea) under Industrial Technology Innovation Program. No.10067184, ‘Development of armored robot systems for personal protections of rescuemen and emergency management operations in the composite disaster site’.
References
- D. Jeong, C. Kim, J. H. Kim, J. Suh, and M. Jin, “Mission Scenario-based Design of Hydraulic Manipulators for Armored Robot Systems,” Journal of Drive and Control, vol.14, no.4, pp. 51-60, Dec., 2017.
-
P.-H. Chang, Y.-H. Kang, G. R. Cho, J. H. Kim, M. Jin, J. Lee, J. W. Jeong, D. K. Han, J. H. Jung, W.-J. Lee, and Y.-B. Kim, “Control architecture design for a fire searching robot using task oriented design methodology,” 2006 SICE-ICASE International Joint Conference, Busan, Korea, pp. 3126–3131, 2006.
[https://doi.org/10.1109/SICE.2006.314817]

-
H.-S. Kim, C.-H. Park, D.-I. Park, H.-M. Do, T.-Y. Choi, D.-H. Kim, and J.-H. Kyung, “Design of high payload dual arm robot with modifiable forearm module depending on mission,” 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, pp. 83-84, 2017.
[https://doi.org/10.1109/URAI.2017.7992892]
- M. Jin, E.-J. Jung, O. Yu, D. Kim, J. Jang, D. Kim, S. Oh, and J. Suh, “Specification development on armored robot systems for accident response in composite disaster site,” Korea Robotics Society Annual Conference, Gangwon-do, Korea, pp. 310–311, 2017.
- Y.-R. Kim, O.-S. Yu, Y.-J. Choi, D.-J. Kim, J.-H. Lee, K. K. Ahn, M. Jin, and J. Suh, “An armored robot system for disaster circumstances,” Korea Robotics Society Annual Conference, Gangwon-do, Korea, pp. 312–313, 2017.
- R. Szeliski, Computer Vision: algorithms and applications, Springer Science & Business Media, 2010.
- R. Hartley and A. Zisserman, Multiple View Geometry in Computer Vision, 2nd ed. Cambridge University Press, 2003.
-
J.-S. Kim, M. Hwangbo, and T. Kanade, “Spherical approximation for multiple cameras in motion estimation: Its applicability and advantages,” Computer Vision and Image Understanding, vol. 114, no. 10, pp. 1068-1083, Oct., 2010.
[https://doi.org/10.1016/j.cviu.2010.07.005]
-
C. Zhu, Z. Zhou, Z. Xing, Y. Dong, Y. Ma, and J. Yu, “Robust plane-based calibration of multiple non-overlapping cameras,” 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, pp. 658-666, 2016.
[https://doi.org/10.1109/3DV.2016.73]
- B. Triggs, P. F. McLauchlan, R. I. Hartley, and A. W. Fitzgibbon. “Bundle Adjustment — A Modern Synthesis,” IWVA 1999: Vision Algorithms: Theory and Practice, Corfu, Greece, pp. 298-372, 1999.
- Frank H. Hawkins, “Space and layout,” Human Factors in Flight, 1st ed. Gower Technical Press, 1987, ch.12, pp. 256-270.
- D. L. Baty and M. L. Watkins, “An Advanced Cockpit Instrumentation System: The Coordinated Cockpit Display,” NASA Ames Research Center, Moffett Field, United States, Rep. NASA-TM-78559, A-7733, July, 1979.
- J. Roskam, “Cockpit (or Flight deck) layout design,” Airplane Design Part III: Layout Design of Cockpit, Fuselage, Wing and Empennage: Cutaways and Inboard Profiles, 1st ed. DAR Corporation, Kansas, USA, 2002, ch.2, pp. 3-29.
- Aircrew Station Vision Requirements for Military Aircraft, AIR FORCE, USA, MIL-STD-850, June 8, 1967.
- Korea Institute of Design Promotion, Size Korea, [Online], https://sizekorea.kr, Accessed: October 9, 2018.

2002 한국과학기술원 기계공학과(학사)
2004 한국과학기술원 기계공학과(석사)
2018~현재 한국로봇융합연구원 선임연구원
관심분야: 여유자유도 로봇, 제어, 로봇 동역학, 로봇 설계

1999 Yanbian University of Science and Technology 재료기계공학과(공학사)
2004 한국과학기술원 기계공학과(공학석사)
2008 한국과학기술원 기계공학과(공학박사)
2008~2016 포항산업과학연구원 책임연구원
2016~현재 한국로봇융합연구원책임연구원
관심분야: 재난 대응 로봇, 로봇 제어, 권취기, 공장자동화, 유압 구동 로봇, 협동 로봇

1986 한양대학교 기계공학과(학사)
1988 한양대학교 기계공학과(석사)
2010 아주대학교 시스템공학과(박사)
2016~현재 ㈜진우에스엠씨 이사
관심분야: Electric Power System, Vehicle Motion Control, Autonomous Vehicle

1995 포항공과대학교 기계공학과(학사)
1997 포항공과대학교 기계공학과(석사)
2002 포항공과대학교 기계공학과(박사)
2005~현재 한국과학기술연구원 책임연구원
관심분야: 족형 로봇, 재난 로봇, 제어 아키텍쳐, 다수로봇-다수사람 인터랙티브 오퍼레이션

1999 연세대학교 전자공학과(학사)
2001 한국과학기술원 전기 및 전자공학과 (석사)
2006 한국과학기술원 전기 및 전자공학과 (박사)
2012~현재 한국과학기술연구원 선임연구원
관심분야: 로봇 비전, 센서 융합

2010 경남대학교 기계공학과(학사)
2017 고려대학교 기계공학과(석사)
2018~현재 한국로봇융합연구원 주임연구원
관심분야: Robotic Manipulation, Rehabilitation engineering, Ergonomics

1993 한양대학교 수학과(이학사)
1998 부경대학교 기계환경해양공학과(공학 석사)
2002 일본 도쿄공업대학교 제어공학과(공학 박사)
2006~2018 한국로봇융합연구원안전로봇사 업단장
2018. 09~현재 부경대학교 기계시스템공학과 교수
관심분야: Disaster Response Robots, Underwater Robots, System Control & Integration