임피던스 제어와 적분 슬라이딩 모드 제어를 이용한 메카넘 휠 이동로봇의 강인한 궤도 추적 제어

© Korea Robotics Society. All rights reserved.
Abstract
Unlike normal wheels, the Mecanum wheel enables omni-directional movement regardless of the orientation of a mobile robot. In this paper, a robust trajectory tracking control method is developed based on the dynamic model of the Mecanum wheel mobile robot in order that the mobile robot can move along the given path in the environment with disturbance. The method is designed using the impedance control to make the mobile robot to track the path, and the integral sliding mode control for robustness to disturbance. The good performance of the proposed method is verified using the MATLAB /Simulink simulation and also through the experiment on an actual Mecanum wheel mobile robot. In both the simulation and the experimentation, we make the mobile robot move along a reference trajectory while maintaining the robot’s orientation at a constant angle to see the characteristics of the Mecanum wheel.
Keywords:
Mecanum wheel, Mobile robot, Trajectory tracking, Impedance control, Integral sliding mode control1. 서 론
오늘날 산업 현장에서 사용하는 대부분의 이동로봇들은 일 반적인 형태의 바퀴를 사용하고 있다. 이러한 이동로봇의 경 우, 이동 방향이 전⋅후로 제한되며 현재 로봇의 자세 또는 방 향을 바꾸기 위해서는 어느 정도의 회전반경이 필요하다는 단 점이 있다. 불필요한 공간과 동선을 최소화할 필요가 있는 산 업 현장에서 이러한 단점은 작업의 효율을 저하시키게 된다. 따라서 더욱 효율적인 이동로봇의 필요성이 대두되었고 일반 적인 바퀴가 아닌 전방향 휠(omnidirectional wheel)을 장착한 이동 로봇에 대한 연구가 이루어지게 되었다. 전방향 휠 이동 로봇에는 많은 종류가 있는데, 본 논문에서는 전방향 휠 이동 로봇중에서도 비교적 제어하기 쉬운 동특성 방정식을 가지고 있는 메카넘 휠(Mecanum wheel)을 장착한 이동로봇에 대해 논하고자 한다.
메카넘 휠은 이동로봇의 전 방향 이동이 가능하도록 설계 된 바퀴로서 1973년에 고안되었다[1]. 메카넘 휠과 일반적인 바 퀴의 가장 큰 차이점은 작은 롤러들이 바퀴에 일정한 각도를 이루며 부착되어 있다는 점이다[2]. 아래 [Fig.1]과 같이 바퀴에 부착된 롤러들은 바퀴의 회전 방향과 45o의 각도를 이루고 있 는데, 이는 바퀴가 회전하면서 지면과 맞닿을 때 힘의 방향이 바퀴의 회전 방향과 달라지게 만든다[3-5]. 따라서 각각의 바퀴 를 회전시키는 방법에 따라 이동로봇의 진행 방향을 자유롭게 조절할 수 있다[6-8]. 물론 로봇이 바라보는 방향을 고정한 채로 움직이거나 제자리에서 회전을 하는 것 또한 가능하다[9-13]. 이 러한 다양한 특성을 가진 메카넘 휠 이동로봇을 실생활 또는 각종 산업 현장에서 효율적으로 사용하기 위해 적응 제어[14], 적응 슬라이딩 모드 제어[15], 모델 예측 제어[13] 등을 비롯한 다 양한 제어 기법을 적용한 궤도 추적 제어 방법에 대한 연구가 이루어져 왔다. 적응 제어의 경우는 파라미터가 불확실하거나 변동이 있어도 제어가 잘되는 반면에 외란에는 다소 약해지는 특징이 있다. 적응 슬라이딩 모드 제어의 경우는 외란을 잘 이 겨내지만 초기 입력이 크고 시스템의 동특성을 잘 따라가지 못한다는 단점이 있다. 모델 예측 제어는 오버슈트가 적은 대 신 응답속도가 느리다는 단점이 있다. 본 논문에서는 임피던 스 제어 (impedance control)[16,17]와 적분 슬라이딩 모드 제어 (integral sliding mode control: ISMC)[18,19]의 장점을 결합한 외 란에 강인한 제어 방법을 제안하고 이를 메카넘 휠 이동로봇 의 궤도 추적 제어에 적용하고자 한다.

Principle of Mecanum wheel
본 논문에서는 시스템이 원하는 임피던스를 갖도록 해주는 즉, 원하는 오차 동특성을 갖도록 시스템의 고유치 설정을 가 능하게 해주는 임피던스 제어를 이용하여 기준 궤도 추적을 위한 공칭 제어 입력을 만든다. 그리고 여기에 초기 시간부터 슬라이딩 평면에 있게 하며 적절한 제어 입력에 의해 지속적 으로 그 평면상에 머물러 있도록 하여 외란이 있는 경우에도 공칭계통의 동특성을 유지할 수 있도록 하는 ISMC를 이용하 여 제어 입력을 설계하여 더해줌으로써 초기 입력의 크기를 낮추고 궤도 추적 중 발생할 수 있는 외란에 강인하게 해주는 궤도 추적 제어 방법을 제시한다. 또한, 본 논문에서는 MATLAB/ Simulink을 이용한 시뮬레이션과 실제 제작한 메카넘 휠 이동 로봇에 의한 실험을 통하여 제안한 궤도 추적 제어 방법에 대 한 성능을 검증한다.
2. 본 론
2.1 메카넘 휠 이동로봇의 동역학 모델
메카넘 휠을 장착한 이동로봇의 동역학 모델은 다음과 같다[16].
| (1) |
여기서 q = [xyθ]T는 로봇의 자세(posture)이고, F는 메카 넘 휠 이동로봇에 인가되는 힘으로서 이동로봇의 입력이다. M은 관성, C는 전향력, 는 각 바퀴에 걸리는 마찰을 나타낸다. 각 행렬은 아래의 식 (2) - (5)와 같이 표현할 수 있다.M3M4
| (2) |
| (3) |
| (4) |
| (5) |
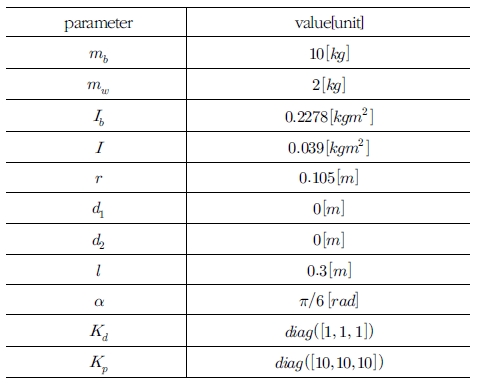
위의 식에서 는 각 바퀴의 각속도, mb는 로 봇 플랫폼의 질량, mw는 로봇 바퀴의 질량, r은 바퀴의 반경, I 는 각 바퀴의 관성 모멘트, Ib는 로봇 플랫폼의 관성 모멘트이 다. d1과 d2는 위치 중심과 질량 중심사이의 거리, l은 위치 중 심으로부터 각 바퀴 축까지의 거리, α는 XR과 바퀴 축 사이의 각으로서 [Fig. 2]에 나타내어져 있다.

Schematic of Mecanum wheel robot[14]
식 (1)의 우변의 힘 F는 메카넘 휠을 장착한 이동로봇의 입 력이다. 그러나 실제 로봇에의 입력으로 사용하기 위해서는 힘 F는 각 바퀴의 모터에 입력되는 토크로 계산되어야 한다. 힘 F는 아래의 식 (6)과 같이 나타낼 수 있다.
| (6) |
위의 식 (6)에서 τ = [τ1τ2τ3τ4]T는 각 바퀴에 걸리는 토크 로서, 아래와 같이 표현될 수 있다.
| (7) |
식 (6)에서 는 3×4 행렬이므로 역행렬이 존재하지 않 는다. 따라서 의 pseudo 역행렬을 이용하여 식 (7)과 같이 τ 를 구할 수 있다. 위의 식 (7)을 이용함으로써, 메카넘 휠 이동 로봇에 인가되는 힘으로부터 각 바퀴에 입력되는 토크를 계산 할 수 있다.
2.2 제어기 설계
본 논문에서는 이동로봇이 주어진 기준 궤도를 추적, 유지 하게 하기 위한 공칭 제어 입력을 만들어주기 위해 임피던스 제어를 사용하였다. 임피던스 제어는 시스템이 확실하지 않아 도 안정적인 상태를 유지하기가 비교적 용이하기 때문이다. 그러나 임피던스 제어는 외란에 비교적 약하다는 단점이 있 다. 따라서 이를 보완하고 시스템에 강인성을 부여하기 위하 여 적분 슬라이딩 모드 제어를 사용하였다. 이 두 가지의 제어 기를 통해 외란의 영향에도 공칭 시스템의 특성을 유지하는 제어기를 설계한다.
먼저 식 (1)에서 이동로봇에 작용하는 마찰력을 측정할 수 없을 경우 시스템에 입력되는 외란으로 가정하고 다음과 같이 표현할 수 있다.
| (8) |
식 (8)의 F0는 공칭 제어 입력으로 본 논문에서는 임피던스 제어를 이용하여 설계한다. 임피던스란 제어하고자 하는 시스 템과 외부 환경이 가지고 있는 힘을 의미하는데 이것을 이용 하여 시스템의 특성을 원하는 대로 결정해 줄 수 있다. 따라서 본 논문에서는 주어진 메카넘 휠 이동로봇의 동특성 방정식을 활용한 임피던스 제어를 통해 이동로봇이 일정한 궤도를 추적 하기 위한 공칭 입력을 만들어 주었다. 시스템이 원하는 임피 던스를 갖도록 하는 공칭 제어 입력 F0는 다음 식 (9)와 같이 설계한다.
| (9) |
여기서, Kd와 Kp는 시스템이 갖고자하는 감쇠 계수와 탄성 계수이다. 그리고 e = q - qd로서 이동로봇의 현재의 자세 q 와 목표로 하는 기준 궤도의 자세 qd와의 오차 이다.
위의 식 (9)를 식 (8)에 대입하여 정리하면 다음 식 (10)과 같 은 오차 동특성 방정식을 얻을 수 있다.
| (10) |
여기서 이다.
슬라이딩 모드 제어란 우리가 설정한 슬라이딩 평면을 통 해 시스템의 동특성을 결정하고, 실제 시스템의 동특성이 이 평면에 수렴하도록 하는 제어 기법이다. 슬라이딩 모드 제어 의 가장 큰 장점은 비선형성과 불확실성에 대한 영향이 적고 외란에 대해 큰 강인성을 가진다는 것이다. 그러나 슬라이딩 평면을 설정하는 과정에서 제어하고자 하는 시스템의 상태가 다른 상태에 종속되기 때문에 기존 시스템의 동특성을 잃게 되고, 초기에 슬라이딩 평면에 도달하는 과정에서 외란의 영 향을 받는다는 단점이 있다. 따라서 본 논문에서는 일반적인 슬라이딩 모드 제어의 단점을 보완한 적분 슬라이딩 모드 제 어(ISMC)를 임피던스 제어와 결합하여 강인성을 추가하였다.
ISMC에 의해 제어 입력 Fsmc를 설계하기 위해 식 (10)을 정 리하면 다음 식 (11)과 같이 된다.
| (11) |
위 식에서 이며, 식 (11)은 다음 식과 같이 행 렬식으로 표현할 수 있다.M12
| (12) |
ISMC를 사용하기 위해서 슬라이딩 평면을 다음과 같이 선 정한다[19].M13
| (13) |
여기서, 로 설정하였다. 이는 상태가 슬라 이딩 평면 위에 존재할 때, 시스템이 공칭 계통의 동특성을 갖 도록 해준다. ISMC 제어 입력을 구하기 위해 Lyapunov 함수 를 다음 식 (14)와 같이 정의한다.
| (14) |
을 만족시키는 입력 usmc를 구하기 위해 를 다 음 식 (15)와 같이 정리할 수 있다.
| (15) |
외란의 최대 크기를 dmax라고 할 때, 을 만족하는 usmc를 구하면 다음 식과 같다.M16
| (16) |
usmc = M1Fsmc이므로, Fsmc는 다음 식과 같이 계산할 수 있다.M17
| (17) |
2.3 MATLAB/Simulink 시뮬레이션 및 결과
시뮬레이션에 사용된 메카넘 휠 이동로봇의 파라미터 및 제어기에 사용된 파라미터 값은 [Table 1]과 같다.

Simulation parameters
먼저 임피던스 제어의 성능을 확인하고 Kp와 Kd에 대한 gain tunning을 위해 기준 궤도에 대한 궤도 추적 시뮬레이션 을 수행하였다. 효과적인 gain tunning을 위해 ISMC를 적용하 지 않고 외란이 없는 상황에서 진행하였다.
[Fig. 3]는 외란이 없는 상태에서 임피던스 제어만을 사용했 을 경우 원형의 기준 궤도에 대한 궤도 추적 시뮬레이션 결과 를 나타낸다. 처음의 Kp와 Kd는 각각 20, 0.1 로 설정하였으며 궤도 추적 성능은 나쁘지 않으나 초기 위치인 (1,0)에서 출발 한 직후 약간의 떨림이 확인되었다. 따라서 이에 대한 추가적 인 gain tunning을 진행하여 [Fig. 4]와 같이 Kp와 Kd가 각각 10 과 1 일 때 최적의 성능을 내는 것을 확인하였다. 따라서 본 논 문의 모든 시뮬레이션과 실험에서 Kp = 10, Kd = 1을 적용 하였다.

Trajectory tracking simulation result using impedance control without disturbance(Kd = 0.1, Kp = 20)

Trajectory tracking simulation result using impedance control without disturbance(Kd = 1, Kp = 10)
[Fig. 5]는 임피던스 제어와 ISMC를 함께 사용한 경우의 기 준 궤도와 이동로봇의 이동 경로를 나타낸다. 파란색 선은 기 준 궤도를 나타내고 주홍색 선은 로봇이 이동한 궤적을 나타 낸다. 초기 위치는 (1, 0)이고 시계 반대 방향으로 이동하였다. 또한 원 궤도를 따라 이동하는 동안 로봇이 바라보는 방향 (orientation)은 0[rad]을 유지하도록 설정하였다.

Trajectory tracking result using impedance control + ISMC (simulation)
외란으로 sine 파를 Fx, Fy, Fθ 에 각각 넣어주었다. 각 sine 파의 크기(amplitude)는 1, 각 주파수(angular frequency)는 0.5 [rad/sec] 로 설정하였으며 각 sine파마다 1 [rad ]씩 위상차를 두었다. 이 때 Fx와 Fy에 대한 외란의 크기의 단위는 [N]이며 Fθ에 대한 단위는 [rad]이다.
[Fig. 5]에서 위의 그래프는 t = 0 [sec] 부터 t = 6 [sec]까지 로봇이 움직인 경로를 나타낸다. 초기 위치인 (1,0)에서 출발 한 직후에 주어진 경로에 대해 약간의 오차가 존재하지만 약 반 바퀴를 주행한 이후로는 오차가 거의 존재하지 않는 것을 확인할 수 있으며, [Fig. 5]의 아래 그래프에서 보다시피 t = 6 [sec] 부터 t = 20 [sec] 구간에선 주어진 궤도에 거의 수렴하는 것을 확인할 수 있다.
[Fig. 6]와 [Fig. 7]은 기준 궤도와 로봇의 실제 위치(x,y)및 각도(θ) 사이의 추적 오차를 나타낸 그래프이다. [Fig.6]는 임 피던스 제어만을 사용한 경우로서 로봇이 외란에 의한 영향을 많이 받는 것을 볼 수 있다. [Fig. 7]은 임피던스 제어와 ISMC 를 같이 사용했을 때의 그래프로서 외란의 영향이 눈에 띄게 줄어든 것을 확인할 수 있다.

Trajectory tracking errors using impedance control only (simulation)

Trajectory tracking errors using impedance control + ISMC (simulation)
[Fig. 8]은 각 변의 길이가 1 [m]인 정사각형 형태의 기준 궤 도에 대하여 임피던스 제어와 ISMC를 함께 적용했을 때 이동 로봇의 이동경로를 나타낸 것이다. 파란색 점선은 기준 궤도 를 나타내며 주홍색 실선은 로봇의 이동경로를 나타낸다. 이 때 로봇의 기준 orientation은 0 [rad]으로 설정하였다.

Square trajectory tracking result using impedance control + ISMC (simulation)
[Fig. 9]과 [Fig. 10]은 사각형 기준궤도에 대한 로봇의 위치 및 orientation 오차를 나타낸 것이다. [Fig. 9]의 경우 임피던스 제어만을 적용했을 때의 이동로봇의 오차이다. 전체적으로 외 란의 영향을 크게 받으며 x와 y의 경우 로봇이 방향 전환을 할 때마다 조금씩 오차가 튀는 것을 볼 수 있다. [Fig. 10]은 임피 던스 제어와 ISMC를 함께 적용했을 때의 이동로봇의 오차로 서 임피던스 제어만을 적용했을 때보다 오차가 눈에 띄게 줄 어든 것을 확인할 수 있다.

Square trajectory tracking errors using impedance control only (simulation)

Square trajectory tracking errors using impedance control + ISMC (simulation)
2.4 실제 실험 및 결과
[Fig. 11]은 실제 실험을 위해 제작된 메카넘 휠 이동로봇이 다. 모터는 Motorbank 사의 BL5740-24V(80W) 감속 모터를 사용하였고, 모터 드라이브는 Maxon 사의 ESCON Module 50/5를 사용하였다. 마이크로프로세서는 ATMEGA128A, 바 퀴는 NEXUS Robot 사의 NX- 14138을 사용하였다.

Mecanum wheel mobile robot used in actual experiments
로봇의 실제 자세를 측정하기 위해 [Fig. 12]와 [Fig. 13]과 같이 초음파 센서 네트워크를 구성하였다. 로봇의 윗면의 앞, 뒤에 부착한 2개의 발신기([Fig. 13]의 보라색 원)에서 발생시 킨 초음파를 6개의 수신기([Fig. 13]의 적색 사각형)로 수신하 여 발신기와 수신기 사이의 거리 정보를 측정한 후 로봇의 현 재 위치와 orientation을 구하였다.

Ultrasonic sensor network

Sensor network concept illustration(left) and ultrasonic sensor for experiment(right)
[Fig. 14]은 실제 메카넘 휠 이동로봇으로 실험한 결과이다. 외란은 2.3절의 시뮬레이션과 동일하게 설정하였다. 그림에 서 파란색 선은 기준 궤도를 나타내고 주홍색 선은 로봇이 실 제 이동한 궤적을 나타낸다. 초기 위치인 (1,0)에서 출발한 뒤 기준 궤적에 대해 약간의 오차가 존재하지만([Fig. 14]의 위 그 래프), 한 바퀴이상 주행한 이후로는([Fig. 14]의 아래 그래프) 기준 궤적에 잘 수렴하는 것을 확인할 수 있다. 바닥과의 마찰 이 생각보다 적어 미끄러짐이 조금 있었고 메카넘 휠 특성상 진동에 의해 약간의 오차가 존재하지만[20], 거의 기준 궤적에 근접하게 움직이는 것을 볼 수 있다.

Trajectory tracking result using impedance control + ISMC (experiment)
위 그림 [Fig. 15]과 [Fig. 16]은 각각 실제 이동로봇에 임피 던스 제어만을 적용했을 때와 ISMC를 추가했을 때의 x, y, θ 에 대한 오차 성분을 나타낸 것이다. [Fig. 15]은 임피던스 제어 만을 적용한 결과로서 x, y, θ모든 영역에서 외란에 의한 영 향이 크게 나타나는 것을 확인할 수 있다. [Fig. 16]은 실제 로 봇에 임피던스 제어와 ISMC를 같이 적용시켰을 때의 결과이 다. 임피던스 제어만을 사용했을 때 보다 오차가 상당히 줄어 든 것을 확인할 수 있다.

Trajectory tracking errors using impedance control only (experiment)

Trajectory tracking errors using impedance control + ISMC (experiment)
[Fig. 16]의 실제 실험 결과를 [Fig. 7]의 시뮬레이션 결과와 비교해 보면, 시뮬레이션의 경우에 비해 x와 y에 대한 오차의 크기는 실제 실험의 경우가 더 큰 것을 알 수 있다. 그렇지만, θ에 대한 오차의 크기는 실제 실험의 경우가 시뮬레이션의 경우에 비해 더 작게 나온 것을 알 수 있다. 이와 같은 원인은 실제 실험에 사용된 로봇으로부터 구해진 시뮬레이션 파라미 터 값들에 불확실성이 존재하고, 또한 로봇의 하드웨어 시스 템이 가지게 되는 자체적인 저주파 통과 필터링 효과에 의한 것으로 판단된다.
3. 결 론
본 논문에서는 임피던스 제어 와 적분 슬라이딩 모드 제어 의 장점을 결합하여 메카넘 휠을 장착한 이동로봇의 주행을 위한 외란에 강인한 궤도 추적 제어 방법을 제안하였다. 또한, 시뮬레이션을 바탕으로 하여 실제 메카넘 휠 이동로봇에 이를 적용하여 실제로 로봇이 외란에 대해 강인성을 가지고 주어진 궤도를 원활하게 추적하는 것을 확인하였다. 또한, 이동로봇 이 바라보는 방향을 일정하게 유지한채 기준 궤도를 따라가는 주행 실험 결과를 통해 메카넘 휠 이동로봇이 일반적인 바퀴 를 장착한 이동로봇 보다 더욱 실용적으로 사용될 수 있음을 확인하였다.
Acknowledgments
This research is financially supported by Changwon National University in 2017~2018.
References
- R. Rojas, “A short history of omnidirectional wheels,” [Online], Available: http://robocup.mi.fu-berlin.de/buch /shortomni.pdf.
- O. Diegel, A. Badve, G. Bright, J. Potgieter, and S. Tlale, “Improved Mecanum wheel design for omni-directional robots,” 2002 Australasian Conference on Robotics and Automation, Auckland, Australia, pp. 117-121, 2002.
-
A. Gfrerrer, “Geometry and kinematics of the mecanum wheel,” Computer Aided Geometric Design, vol. 25, no. 9, pp. 784-791, Dec., 2008.
[https://doi.org/10.1016/j.cagd.2008.07.008]

- F. Adăcăiţi and I. Doroftei, “Practical applications for mobile robots based on Mecanum wheels - a systematic survey,” International Conference On Innovations, Recent Trends And Challenges In Mechatronics, Mechanical Engineering And New High-Tech Products Development –MECAHITECH’11, Bucharest, Romania, vol. 3, pp. 112-123, 2011.
- S. D. Kamdar, “Design and manufacturing of a Mecanum wheel for the magnetic climbing robot,” Master of Science in Mechanical Engineering, Embry-Riddle Aeronautical University, Daytona Beach, Florida, USA, 2015.
- J. E. M. Salih, S. Yaacob, and M. M. R. M. Juhari, “Omnidirectional mobile robot with Mecanum wheel,” 1st International Workshop on Artificial Life and Robotics, pp.101-106. 2005.
-
Y. Jia, X. Song, and S. S.-D. Xu, “Modeling and motion analysis of four-Mecanum wheel omni-directional mobile platform,” 2013 CACS International Automatic Control Conference, Nantou, Taiwan, pp. 328-333, 2013.
[https://doi.org/10.1109/CACS.2013.6734155]
- H. Taheri, B. Qiao, and N. Ghaeminezhad, “Kinematic model of a four Mecanum wheeled mobile robot,” International Journal of Computer Applications (0975-8887), vol. 113, no. 3, pp. 6-9. Mar. 2015.
-
J. E. M. Salih, M. Rizon, S. Yaacob, A. H. Adom, and M. R. Mamat, “Designing omni-directional mobile robot with Mecanum wheel,” American Journal of Applied Sciences, vol. 3, no. 5, pp. 1831-1835, Oct. 2006.
[https://doi.org/10.3844/ajassp.2006.1831.1835]
- S. Soni, T. Mistry, and J. Hanath, “Experimental analysis of Mecanum wheel and omni Wheel,” IJISET – International Journal of Innovative Science, Engineering & Technology, vol. 1, no. 3, pp. 292-295, May. 2014.
- B. Chu, “Performance evaluation of Mecanum wheeled omnidirectional mobile robot,” 31st ISARC, Sydney, Australia, pp. 784-789, 2014.
- M. Abdelrahman, I. Zeidis, O. Bondarev, B. Adamov, F. Becker, and K. Zimmermann, “A description of the dynamics of a four-wheel Mecanum mobile system as a basis for a platform concept for special purpose vehicles for disabled persons,” 58th ILMENAU SCIENTIFIC COLLOQUIUM, Ilmenau, Germany, pp. 1-10, 2014.
-
A. F. M. Fuad, I. A. Mahmood, S. Ahmad, N. M. H. Norsahperi, S. F. Toha, R. Akmeliawati and F. J. Darsivan, “Modeling and simulation for heavy-duty Mecanum wheel platform using model predictive control,” IOP Conference Series: Materials Science and Engineering, vol. 184, 2017, DOI: 10.1088/1757-899X/184/1/012050.
[https://doi.org/10.1088/1757-899X/184/1/012050]
-
L.-C. Lin and H.-Y. Shin, “Modeling and adaptive control of an omni-Mecanum-wheeled robot,” Intelligent Control and Automation, vol. 4, no. 2, pp. 166-179, 2013.
[https://doi.org/10.4236/ica.2013.42021]
-
V. Alakshendra and S. S. Chiddarwar, “A robust adaptive control of Mecanum wheel mobile robot: simulation and experimental
validation,” 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, pp. 5606-5611, 2016.
[https://doi.org/10.1109/IROS.2016.7759824]
-
C.-C. Cheah and D. Wang, “Learning impedance control for robotic manipulators,” IEEE Transactions on Robotics and
Automation, vol. 14, no. 3, pp. 452-465, Jun., 1998.
[https://doi.org/10.1109/70.678454]
-
S. Jung, T. C. Hsia, and R. G. Bonitz, “Force tracking impedance control of robot manipulators under unknown environment,” IEEE Transactions on Control Systems Technology, vol. 12, no. 3, pp. 474-483, May, 2004.
[https://doi.org/10.1109/TCST.2004.824320]
-
Q. Gao, L. Liu, G. Feng, Y. Wang, and J. Qiu, “Universal fuzzy integral sliding-mode controllers based on T-S fuzzy models,” IEEE Transactions on Fuzzy Systems, vol. 22, no. 2, pp. 350-362, Apr., 2014.
[https://doi.org/10.1109/TFUZZ.2013.2254717]
- D. S. Baek, S. K. Park, and T. S. Yoon, “Trajectory tracking control system design of mobile robot based on WIPDC and ISMC,” KIEE Summer Conference 2015, Muju, Korea, pp. 1337-1338, 2015.
-
J.-J. Bae and N. Kang, “Design optimization of a Mecanum wheel to reduce vertical vibrations by the consideration of equivalent stiffness,” Shock and Vibration, vol. 2016, Article ID, 2016, DOI: 10.1155/2016/5892784.
[https://doi.org/10.1155/2016/5892784]

2017 창원대 물리학과(학사)
2017~현재창 원대 전기공학과 석사 과정
관심분야: Mobile Robot, Quadcopter, Control Theory, Robotics

2016 창원대 전기공학과(공학사)
2018 창원대 전기공학과(공학석사)
2018~현재이 레산업 기술연구소
관심분야: Mobile Robot, Control Theory, Robotics, Programming

1978 연세대 전기공학과(공학사)
1980 연세대 전기공학과(공학석사)
1988 연세대 전기공학과(공학박사)
1994~1995 미국 Vanderbilt대 visiting professor
1989~현재창 원대학교 전기전자제어 공학부 교수
관심분야: Signal Processing, Intelligent Control, Mobile Robot Control and Navigation