의수 제어용 동작 인식을 위한 웨어러블 밴드 센서

© Korea Robotics Society. All rights reserved.
Abstract
The recent prosthetic technologies pursue to control multi-DOFs (degrees-of-freedom) hand and wrist. However, challenges such as high cost, wear-ability, and motion intent recognition for feedback control still remain for the use in daily living activities. The paper proposes a multi-channel knit band sensor to worn easily for surface EMG-based prosthetic control. The knitted electrodes were fabricated with conductive yarn, and the band except the electrodes are knitted using non-conductive yarn which has moisture wicking property. Two types of the knit bands are fabricated such as sixteen-electrodes for eight-channels and thirty-two electrodes for sixteen-channels. In order to substantiate the performance of the biopotential signal acquisition, several experiments are conducted. Signal to noise ratio (SNR) value of the knit band sensor was 18.48 dB. According to various forearm motions including hand and wrist, sixteen-channels EMG signals could be clearly distinguishable. In addition, the pattern recognition performance to control myoelectric prosthesis was verified in that overall classification accuracy of the RMS (root mean squares) filtered EMG signals (97.84%) was higher than that of the raw EMG signals (87.06%).
Keywords:
Knitted Electrodes, Electromyogram (EMG), Prosthetic Control, Conductive Fabric, Wearable Sensor1. 서 론
로봇 의수(robotic prosthesis)는 상지 절단자들의 요구를 충 족시키기 위해 많은 연구자들에 의해 개발되고 있다. 의수는 기능에 따라 3가지로 분류할 수 있다. 가장 보편적으로 사용되 는 미용 의수(cosmetic prosthesis)는 기능보다 미관에 중점을 맞춘 저가형 의수이며, 간단한 동작을 할 수 있는 인체 구동형 의수(body-powered prosthesis)는 신체를 이용하여 작동할 수 있지만 어깨나 목에 무리를 주는 문제점이 있다. 이를 보완하 기 위해, 근전도를 이용하여 구동되는 근전 의수(myoelectric prosthesis)가 있으며, 잔존 근육으로부터 발생되는 표면 근전 도(surface electromyogram)를 이용하여 제어하는 전동 의수이 다. 표면 근전도를 측정하기 위해 일회용 염화은 전극(Ag/AgCl electrode) 또는 금속 전극(metal electrode)을 이용한다. 일회용 전극은 의료용 접착제인 전해액(electrolytic gel)이 도포되어 피부에 부착할 수 있지만, 알레르기 및 피부 트러블 등을 발생 시킬 수 있다[1]. 일회용 전극의 재사용이 불가능한 단점을 보 완하기 위해 근전 의수에서는 주로 금속 전극을 이용하고 있 다. 그러나 금속 전극은 의수에 장착 시키기 위해 소켓(socket) 내부에 주로 위치하며, 신호 손실을 막기 위해 절단 부위와 밀 착시켜야 하고, 장기간 착용한 경우, 통증, 가려움 및 피부 트 러블 등의 부작용으로 인하여 의수 착용을 거부하는 경우가 발생한다[2]. 또한, 소켓은 사용자 잔여 부위에 따른 맞춤 제작 형식이기 때문에 전극 모양, 크기, 그리고 위치 등 제한적 요소 가 많다[3].
이처럼 일회용과 금속 전극에서 존재하는 문제점을 개선하 기 위하여, 전도성 섬유를 이용한 섬유 전극에 대한 연구가 진 행되고 있다. 최근 섬유 전극은 저렴한 비용, 우수한 전도성, 그리고 부드러운 소재 특성으로 생체 신호를 측정하기 위한 웨어러블 디바이스, 재활의료 장비 등의 다양한 분야에서 연 구되고 있다[4-9]. 전도성 섬유로는 원사에 은(Ag)을 코팅하여 만든 은 코팅 전도성 원사(silver-coated conductive yarn)가 대 표적이다. 은(Ag)은 산화되지 않는 특성과 우수한 항균성을 가지고 있어, 로봇 의수 제어를 위한 섬유 전극으로 적합한 소 재이다. 이러한 전도성 원사를 이용한 전극은 사용자의 절단 부위에 직접 닿아도 피부 트러블이 적고, 일상생활에서 가장 쉽게 접할 수 있는 소재이기 때문에 사용자들이 이질감 없이 편리하게 사용할 수 있다[10].
오늘날 로봇 의수는 일상생활에 필요한 손가락과 손목에 대한 다 자유도 구동방식을 추구하는 방식으로[11], 최신 기술 을 도입한 의수에 대한 연구가 많이 진행되고 있다. 이에 반해, 아직까지 일상생활에서 사용하기에는 어려운 문제점들인 높 은 비용, 무거운 무게, 착용감, 그리고 동작 의도 실시간 인식 문제 등이 남아있다[12]. 또한, 어린 사용자들의 잔존 부위는 계 속 변화하기 때문에 의수 제작에 많은 어려움이 따른다. 그러 므로, 모든 사용자들이 쉽고 편리하게 착용할 수 있는 웨어러 블 센서에 대한 연구가 필요하다. 최근 근전 의수의 전극에 관 한 기능적 측면을 보완하기 위하여, 전도성 섬유를 이용한 웨 어러블 근전도 센서에 관한 연구들이 진행되고 있다. Jiang et al.의 연구[13,14]는 근전 의수 제어를 위한 표면 근전도 센서에 관한 연구를 수행하였으며, 전도성 폴리피롤(polypyrrole)이 코팅된 부직포(nonwoven)를 이용하여 일회용 전극과의 비교 를 통해 성능을 분석하였다. 개발된 전극은 유연한 소재로 절 단 부위의 크기와 상태에 맞게 착용할 수 있으나, 전극 부분을 밴드에 부착하는 형태로 통합형이 아니며, 6개의 전극으로 이 루어진 3채널 근전도 시스템으로 동작 의도 인식을 위한 신호 획득에 있어 한계가 있다. Brown et al.의 연구[15]는 근전도 모 니터링을 위한 인타샤 니팅(intarsia knitting) 기법의 측정 밴드 를 개발하는 것으로, 8개의 전극으로 이루어진 4채널에 대한 근전도를 측정할 수 있다. 그러나 전극과 스냅 커넥터를 연결 하는 원단, 섬유 전극, 그리고 밴드 부분으로 나눠져 있어서 밴 드는 지퍼(zipper)를 부착해야 크기 조절 및 피부와 밀착이 가 능하다. Yang et al.의 연구[16]는 기능적 전기 자극(functional electrical stimulation, FES)을 위한 전도성 잉크를 프린트한 섬 유 전극(fabric electrodes) 개발에 대한 내용으로 합성 직물 (polyester65%, cotton35%)에 24개의 전극이 프린트된 형태이 며, 착용 시 테이프를 이용하여 피부에 부착해야 하므로 착용 감이 저하되는 문제점이 남아있다. Lee et al.의 연구[17,18]는 섬 유 전극과 밴드의 통합 형태로 센서를 제작하였고, 기존 일회 용 전극과의 비교를 통해 유사한 성능을 확인하였으나, 측정 부위를 전완부로만 국한시켰다. 이처럼 기존 선행 연구들의 경우, 섬유를 이용한 표면 근전도 센서 개발로써 기존의 전극 과 유사한 성능을 보였으나, 다양한 패턴 인식, 통합형 프로세 스, 그리고 다채널 근전도 전극 제작 및 실용성에 대한 연구는 미비한 실정이다.
따라서 본 연구의 목적은 일상생활에서 사용할 수 있는 로 봇 의수 제어를 위한 다채널 근전도 니트 밴드 센서를 개발하 는 것이다. 절단된 잔여 부위의 다양한 크기 와 모양을 고려한 우수한 착용감의 근전도 센서를 제작하고, 표면 근전도에 대 한 성능 및 다양한 동작에 대한 패턴 인식률 분석을 통하여 상 용화 가능성을 찾는 것에 의의를 두는 바이다.
이에 본 논문은 2장 다채널 니트 밴드 센서 제작, 3장 실험 방법 및 결과, 그리고 4장 결론으로 구성된다. 2장에서는 다채 널 니트 밴드 센서에 대한 제작 방법 및 원리에 대해 설명하고, 3장에서는 근전도 분석과 10가지 동작에 대한 패턴 인식률 실 험을 통하여 섬유 전극의 성능과 사용자의 동작에 따른 인식이 잘 반영되었는지 확인해 본다. 마지막으로, 4장에서는 본 연구 에 대한 요약 및 결론과 추후 연구방향에 대하여 기술한다.
2. 다채널 니트 밴드 센서 제작
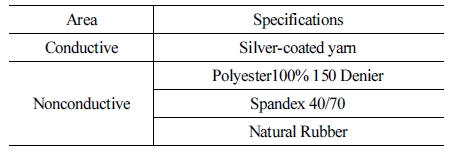
다채널 니트 밴드 센서는 근전 의수 사용자들이 일상생활 에서 편리하게 착용이 가능하도록 전도성 섬유를 밴드 형태로 제작하였다. 다채널 니트 밴드 센서는 전도성 영역과 비전도 성 영역으로 크게 2가지로 분류할 수 있다. 섬유 전극에 해당 하는 전도성 원사는 나일론 6.6 필라멘트사에 은을 도금한 원 사(Statex© Shieldex®, 117/17dtex 100 HC+B)를 사용하였으 며, 항균성과 우수한 전도성을 가진 섬유이다[1]. 비전도성 원 사는 전극 이외의 밴드 대부분을 차지하며, 피부에 가장 많이 접촉되는 부분이다. 따라서 땀과 수분을 잘 흡수시키고 빠르 게 건조하는 흡한속건 기능이 뛰어난 원사를 사용함으로써 사 용자들에게 쾌적한 착용감을 제공할 수 있다. 이 밖에, 폴리우 레탄(polyurethane) 섬유의 탄성사로 만든 스판덱스(spandex) 와 고무(rubber)사를 전체 영역에 편성하여 신축성을 부여하 였다. [Table 1]은 다채널 니트 밴드 센서를 제작하기 위한 재 료에 대해 정리한 표이다.

Materials and specifications
다채널 니트 밴드 센서는 16개의 전극으로 이루어진 8채널 니트 밴드와 32개의 전극의 16채널 니트 밴드의 2가지 형태로 제작하였으며[Fig. 1(a)], 전도성 영역과 비전도성 영역이 서로 간섭 받지 않도록 인타샤(intarsia) 니팅 기법을 이용하였다. 인 타샤 니팅은 원사에 의해 형성된 루프(loop)로 이루어진 니트 이다. 이는 주로 다양한 패턴에 원하는 원사를 삽입하고, 이를 단일 평면상으로 편성하기 위한 기법이다. 따라서 전도성과 비전도성 영역의 표면과 이면이 서로 포함되지 않고 동일 레 이어 상에 위치되도록 편성할 수 있으며, 원사 소모량이 적어 경제적이고, 단일 편성물로 부피를 줄여 궁극적으로 사용자에 게 무게감을 감소시킬 수 있다.

The developed knit band sensors: (a) the external side and internal side (b) cross-sectional view and electrodes size.
니트 밴드 센서는 피부와 접촉하는 전극이 있는 안면 (internal side)과 전극 영역을 외부 환경으로부터 보호하고 커 넥터가 연결되어 있는 겉면(external side)으로 2중 제작하였 다. 섬유 전극의 크기 및 거리는 SENIAM (Surface Electromyography for the Non-Invasive Assessment of Muscle)을 기준 으로 하였고, 한 변의 길이가 1.2 cm인 정사각형으로 전극 간 거리를 2 cm로 선정하였다 [Fig. 1(b)].
3. 실험 방법 및 결과
본 연구는 한양대학교 기관 생명윤리위원회(the Institutional Review Board: RIB)에서 2018년 7월(HYI-16-05505) 최종승인 을 받은 후에 진행하였다.
3.1 실험대상 및 방법
본 연구의 대상은 건강한 20-30대 성인 남녀 5명(남성 3명, 여성 2명)과 40대 오른쪽 전완 절단자 1명을 선정하였으며, 모 든 피험자들은 실험에 대한 설명을 충분히 듣고 진행하였다. [Fig. 2(a)]와 같이 피험자는 의자에 앉은 자세로 오른쪽 전완 과 상완에 다채널 니트 밴드 센서를 착용하였다. 본 연구의 신 호 취득 방법으로는 두 개의 전극을 이용한 양극 전극법이 사 용되었으며, 전극은 손목과 손가락의 움직임과 관련이 있는 손목 신전근(wrist extensor muscle)과 손목 굴곡근(wrist flexor muscle)과, 상완 이두근(biceps brachii muscle), 과 삼두근(triceps brachii muscle)이 있는 전완과 상완에 배치되었다[Fig. 2(b)]. 다시 말해서, 제작된 16채널과 8채널 밴드 센서들을 오른쪽 전 완과 상완에 각각 장착하여 실험을 진행하였으며, 각각 8개의 신호를 취득할 수 있도록 착용하였다.

sEMG signal measurement experiment: (a) experimental setup (b) placements of the electrodes
전완에 적용된 16채널 밴드 센서의 경우 8채널만 신호 획득에 사용하였다[Fig. 2(a)]. 신호 획득과 증폭을 위해 고속 INTAN RHS2000 chip을 사용하여 1 kHz로 샘플링하고 저장 하였다. 저장된 데이터에 대해서 저주파 드리프트(drift)와 고주파 노이즈 제거를 위해 8~200 Hz의 절단 주파수(cut-off frequency)를 가진 대역통과필터(band-pass filter)를 적용하였 고, 또한 전원 노이즈 제거를 위해 60 Hz notch filter를 사용하였고, 마지막으로 128 ms 크기의 이동제곱평균제곱근 적용하 였다. 다채널 니트 밴드 센서에서 측정된 모든 신호 처리는 MATLAB R2018a (MathWorks, Natick, MA, USA)을 이용하 였다.
3.2 실험결과
다채널 니트 밴드 센서를 이용한 표면 근전도 측정 시 외부 환경에 영향을 받아 불필요한 성분의 잡음이 포함될 수 있고, 전극 위치에 따라 신호 크기보다 잡음의 크기가 강할 수 있다. 따라서 로봇 의수 제어를 위하여 우수한 신호 대 잡음 비 (signal to noise ratio, SNR)를 가져야 한다. 신호 대 잡은 비 (SNR)에서 Esignal은 근육 활동(muscle activation)에 대한 원 (Raw) 표면 근전도 신호의 제곱의 합이고, Enoise은 베이스라인 노이즈(baseline noise)의 제곱의 합이며, 이를 이용한 SNR 식 은 다음과 같다.
| (1) |
6명의 피험자에 대한 평균 SNR 값은 18.48 dB이며, 피험자 B가 23.02 dB로 최댓값을 보였고, 피험자 E는 15.70 dB로 최솟 값을 나타냈다. 이는 기존 일회용 전극이 평균 13.30 dB을 보 이는 것에 비하여[18], 전체적으로 우수한 SNR 값을 보였다. 또 한, 상지 절단자는 16.22 dB로 평균값보다는 낮게 측정되었지 만, 다른 피험자들과의 차이가 크지 않았다[Fig. 3].

Results of the signal-to-noise ratio (dB) of six subjects while grasping.
다채널 니트 밴드 센서의 신호를 분석하기 위해, 손을 쥐 고 있는(grasp) 동작에 대한 표면 근전도 분석을 실시하였 으며, 손을 쥐고 있을 때의 근육 활동과 동작을 실행하지 않 는 베이스라인 노이즈에 대하여 명확하게 구분할 수 있었다 [Fig. 4], [Fig. 5(a)]는 손을 쥐고 있는 동작(grasp)에 대한 표면 근전도를 나타내며, 전완부에서 신호가 강하게 나타났다. [Fig. 5(b)]에서 보이듯이 전완 굽힘(flexion) 동작의 경우, 앞쪽 상완과 앞쪽 팔뚝 근육(anterior forearm muscle) 부위에 강한 신호가 검출되었다. 따라서, 16개의 채널 간 신호 비교를 통해 10가지의 동작 패턴을 구분할 수 있었다.

sEMG signals obtained from amputee while grasping: (a) raw sEMG signal (b) RMS sEMG signal.

Raw sEMG signals of sixteen-channels knitted electrodes: (a) for grasp motion (b) for forearm flexion motion, where ARM implies the upper arm.
다채널 니트 밴드의 실용성을 검증하기 위하여, 패턴 인식 및 분류를 실시하였다. 피험자는 전완과 상완에 다 채널 니트 밴드를 착용한 후, 연구자의 신호에 따라 10가 지 동작을 3초 동안 각각 2회씩 수행하였다. 로봇 의수 제 어를 위해 필요한 움직이라고 판단되는 10가지 동작으로 휴식(relax), 주먹(grasp), 굴곡(flexion), 신전(extension), 외전 (supination), 회내(pronation), 요측 변위(radial deviation), 척골 변위(ulnar deviation), 팔뚝 굴곡(forearm flexion), 팔뚝 신전 (forearm extension)으로 선정하였으며, 패턴 인식 및 분류를 실시하였다[Fig. 6].

Ten postures for classification experiments.
전완과 상완에서 측정된 값과 10가지 동작을 매칭 시키기 위해, 기계 학습에 용이할 수 있도록 데이터를 가공하였고, 전 형적인 기계 학습 방법 중 하나인 인공 신경망(Artificial Neural Network, ANN) 알고리즘을 적용하여 각 피험자에 대한 패턴 인식을 학습하였다[19]. 10가지 동작의 원(raw) 표면 근전도와 이동제곱평균제곱근(moving-average RMS) 표면 근전도에 대 하여 16개의 채널에서 각각 10,000개의 샘플/채널(총 데이터 개수는 16채널 x 10,000 이지만, 본 논문에서는 채널당 샘플 데이터를 기준으로 함) 데이터를 추출하였고, 데이터는 16 채널과 10개의 동작에 대한 레이블로 구성되었다. 개별 피 험자에 대한 패턴인식 및 분류를 위해 사용된 구조는 16채널 의 입력 노드(node)를 갖도록 구성하였으며, 1개의 은닉층 (hidden layer)과 50개의 뉴런(neuron)을 사용하였다. 데이터는 각각 트레이닝(training set) 70%, 검증(validation set) 15%, 테 스트(testing set) 15%로 분류하여 오버 트레이닝(over-training) 을 방지하였다. 취득한 값은 MATLAB R2018a (MathWorks, Natick, MA, USA)의 Neural Net Pattern Recognition 툴을 사용 하였고, 지도 학습(supervised learning)에서 대표적으로 사용 되는 cross-entropy를 손실 함수(loss function)로 사용하였으 며, 식은 아래와 같다.
| (2) |
여기서 S는 니트 밴드 센서에서 취득하여 샘플링한 표면 근 전도 집합, zs는 동작에 대한 입력 값이고, 는 신경회로망을 사용하여 추정된 동작 값이다.
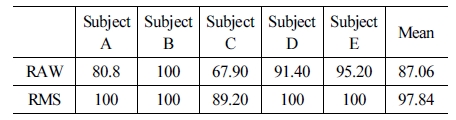
[Table 2]는 5명의 피험자 각각에 대한 원 표면 근전도 값과 이동제곱평균제곱근 표면 근전도 값에 대한 패턴 인식률을 나 타낸 것이다. 원 표면 근전도 보다 이동제곱평균제곱근 표면 근전도에서 모든 피험자의 정확도가 높게 나타났으며, 전체 피험자에 대한 평균은 원 표면 근전도와 이동제곱평균제곱근 표면 근전도에서 각각 87.06%, 97.84%로 나타났다. 따라서, 이동제곱평균제곱근 표면 근전도에 대한 데이터를 적용함으 로써 인식률을 향상시킬 수 있음을 확인하였다.
Results of pattern recognition (%)
더 나아가 5명 피험자의 이동제곱평균제곱근 데이터인 50,000개(=10,000 샘플/채널 x 피험자 5명)를 모두 통합하여 하나의 인공신경망에 입력하여 패턴 인식 및 분류를 새롭게 실시하였고, 전체 인식률은 98.0%로 높게 나타났다[Fig. 7]. 실 험에 사용된 10가지 동작 중 주먹(G), 신전(E), 외전(S)의 3가 지 동작을 제외한 7가지 동작에서는 100%로 높은 인식률을 보였으며, 특히 신전 동작에 대해서는 5000개의 샘플/채널 데 이터 중 4330개의 샘플/채널 데이터를 올바르게 인식하고, 670 개의 데이터에 대해서는 주먹(G)으로 인식하여 86.6%로 가장 낮은 인식률이 나타났다.

Confusion matrices of ten postures when the neural network was trained using RMS filtered sEMG signals data of all the subjects except amputee, where R: relax, G: grasp, F: flexion, E: extension, S: supination, P: pronation, R/E: radial deviation, U/D: ulnar deviation, F/F: forearm flexion, and F/E: forearm extension.
또한, 전완 절단자에 대해서 동일한 실험을 통해 10,000개 의 샘플/채널 데이터 획득하여 패턴 인식 및 분류에 대한 추가 실험을 수행하였다. 그 결과 원 표면 근전도와 이동제곱평균 제곱근 표면 근전도로 학습한 경우 각각 84.7%와 100%로 나 타났다. 특히 원 표면 근전도로 학습한 경우, 상완에 관한 동작 인 팔뚝 굴곡(F/F), 팔뚝 신전(F/E) 동작에서 90% 이상의 높은 인식률이 나타났으며, 회내(P) 동작이 69.9%로 가장 낮은 인 식률을 보였다[Fig. 8].

Confusion matrices of ten postures when the neural network was trained using raw sEMG data of amputee, where it is noted that the raw data were used because the recognition rate was 100% in case of the RMS filtered signal.
4. 결 론
본 연구는 일상생활에서 사용할 수 있는 상지 절단자의 로 봇 의수 제어를 위한 다채널 니트 밴드 센서를 개발하는 것을 목표로 하고 있다. 다채널 니트 밴드 센서는 16전극으로 이루 어진 8채널 센서와 32전극의 16채널 센 서로 제작하였으며, 전 도성과 비전도성 영역은 서로 간섭 되지 않도록 인타샤 니팅 기법을 이용한 밴드 형태로 제작하였다. 기존의 일회용 또는 금속 전극과 다르게, 니트 밴드 형태의 섬유 전극은 우수한 신 축성으로 사용자의 착용감을 향상시키고, 의복과 같은 소재로 제작되어 세탁이 용이하고 우수한 통기성을 지닌다. 따라서, 니트 밴드 에 삽입된 섬유 전극은 사용자의 잔여 부위에 탄력적 으로 부착될 수 있다.
이렇게 개발된 다채널 니트 밴드 센서에 대한 성능을 평가 하기 위하여, 표면 근전도 분석 평가와 패턴 인식 및 분류 평가 를 실시하였다. 표면 근전도에 대한 신호 대 잡음비는 상용 전 극인 일회용 전극에 비해 우수한 성능을 보였으며, 동작에 따 른 16개의 채널 간 근전도의 비교를 통해 다양한 패턴을 확인 하였다. 또한, 로봇 의수 제어를 위해 필요하다고 판단되는 10 가지 동작에 대한 패턴 인식률은 원 표면 근전도와 이동제곱 평균제곱근 표면 근전도 를 입력으로 사용하여 제시하였으며, 이동제곱평균제곱근 표면 근전도에서 높은 인식 성능을 보였 다. 또한, 절단자의 절단 부위에 착용하여 분석한 결과, 다른 피험자들의 인식률에 대하여 큰 차이없이 유사한 결과가 나타 났다. 즉, 절단 부위에 착용시 성능 차이는 미미한 수준으로 확 인하였다.
이러한 결과는 다채널 니트 밴드 센서를 이용한 재활용 웨 어러블 디바이스 개발 및 기존 의수를 넘어 생체 모사 의수 등 의 후속 연구에 적용될 수 있다.
References
-
V. Marozas, A. Petrenas, S. Daukantas, and A. Lukosevicius, “A comparison of conductive textile-based and silver/silver chloride gel electrodes in exercise electrocardiogram recordings,” Journal of electrocardiology, vol. 44, no. 2, pp. 189-194, Mar-Apr., 2011.
[https://doi.org/10.1016/j.jelectrocard.2010.12.004]

-
J. S. Head, D. Howard, S. W. Hutchins, L. Kenney, G. H. Heath, and A. Y. Aksenov, “The use of an adjustable electrode housing unit to compare electrode alignment and contact variation with myoelectric prosthesis functionality: A pilot study,” Prosthetics and orthotics international, vol. 40, no. 1, pp. 123-128, Feb., 2016.
[https://doi.org/10.1177/0309364614545417]
- C. W. Moran, “Revolutionizing prosthetics 2009 modular prosthetic limb-body interface: Overview of the prosthetic socket development,” Johns Hopkins APL Technical Digest, vol. 30, no. 3, pp. 250-255, 2011.
-
R. Paradiso, G. Loriga, and N. Taccini, “A wearable health care system based on knitted integrated sensors,” IEEE transactions on Information Technology in biomedicine, vol. 9, no. 3, pp. 337-344, Sept., 2005.
[https://doi.org/10.1109/TITB.2005.854512]
-
C. Cochrane, V. Koncar, M. Lewandowski, and C. Dufour, “Design and development of a flexible strain sensor for textile structures based on a conductive polymer composite,” Sensors, vol. 7, no. 4, pp. 473-492, 2007.
[https://doi.org/10.3390/s7040473]
-
J. Löfhede, F. Seoane, and M. Thordstein, “Textile Electrodes for EEG Recording—A pilot study,” Sensors, vol. 12, no. 12, pp. 16907-16919, Dec., 2012.
[https://doi.org/10.3390/s121216907]
-
W. Wu, S. Pirbhulal, H. Zhang, and S. C. Mukhopadhyay, “Quantitative Assessment for Self-Tracking of Acute Stress based on Triangulation Principle in a Wearable Sensor Syst em,” IEEE Journal of Biomedical and Health Informatics, pp. 1-1, May, 2018.
[https://doi.org/10.1109/JBHI.2018.2832069]
- X. Xiao, S. Pirbhulal, K. Dong, W. Wu, and X. Mei, “Performance evaluation of plain weave and honeycomb weave electrodes for human ECG monitoring,” Journal of Sensors, vol. 2017, Article ID 7539840, 13 pages, 2017.
-
W. Wu, H. Zhang, S. Pirbhulal, S. C. Mukhopadhyay, and Y.-T. Zhang, “Assessment of biofeedback training for emotion management through wearable textile physiological monitoring system,” IEEE Sensors Journal, vol. 15, no. 12, pp. 7087-7095, Dec., 2015.
[https://doi.org/10.1109/JSEN.2015.2470638]
-
M. K. Yapici and T. E. Alkhidir, “Intelligent Medical Garments with Graphene-Functionalized Smart-Cloth ECG Sensors,”
Sensors, vol. 17, no. 4, p. 875, 2017.
[https://doi.org/10.3390/s17040875]
-
F. Cordella, A. L. Ciancio, R. Sacchetti, A. Davalli, A. G. Cutti, E. Guglielmelli, and L. Zollo, Literature review on needs of upper limb prosthesis users, Frontiers in neuroscience, vol. 10, p. 209, May, 2016.
[https://doi.org/10.3389/fnins.2016.00209]
-
E. A. Biddiss and T. T. Chau, “Upper limb prosthesis use and abandonment: a survey of the last 25 years,” Prosthetics and orthotics international, vol. 31, no. 3, pp. 236-257, Sept., 2007.
[https://doi.org/10.1080/03093640600994581]
- Y. Jiang, S. Sakoda, M. Togane, S. Morishita, B. Lu, and H. Yokoi, “A highly usable and customizable sEMG sensor for prosthetic limb control using polypyrrole-coated nonwoven fabric sheet,” 2015 IEEE SENSORS, Busan, South Korea, pp. 1-4, 2015.
-
Y. Jiang, M. Togane, B. Lu, and H. Yokoi, “sEMG Sensor Using Polypyrrole-Coated Nonwoven Fabric Sheet for Practical Control of Prosthetic Hand,” Frontiers in neuroscience, vol. 11, p. 33, Feb., 2017.
[https://doi.org/10.3389/fnins.2017.00033]
-
S. Brown, M. Ortiz-Catalan, J. Petersson, K. Rödby, and F. Seoane, “Intarsia-sensorized band and textrodes for real-time myoelectric pattern recognition,” 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, pp. 6074-6077, 2016.
[https://doi.org/10.1109/EMBC.2016.7592114]
-
K. Yang, C. Freeman, R. Torah, S. Beeby, and J. Tudor, “Screen printed fabric electrode array for wearable functional electrical stimulation,” Sensors and Actuators A: Physical, vol. 213, pp. 108-115, Jul., 2014.
[https://doi.org/10.1016/j.sna.2014.03.025]
-
S. A. Lee, M. O. Kim, T. Gang, and Y. Choi, “Development of knit band electrodes for multi-channel sEMG measurement,” 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, South Korea, pp. 827-829, 2017.
[https://doi.org/10.1109/URAI.2017.7992835]
-
S. Lee, M.-O. Kim, T. Kang, J. Park, and Y. Choi, “Knit Band Sensor for Myoelectric Control of Surface EMG-based Prosthetic Hand,” IEEE Sensors Journal, vol. 18, no. 20, Oct., 2018.
[https://doi.org/10.1109/JSEN.2018.2865623]
-
Y.-J. Kim, D.-H. Lee, H. Park, J.-H. Park, J.-H. Bae, and M.-H. Baeg “Wrist and Grasping Forces Estimation using Electromyography for Robotic Prosthesis,” The Journal of Korea Robotics Society, vol. 12 no. 2, pp. 206-216, Jun., 2017.
[https://doi.org/10.7746/jkros.2017.12.2.206]

2017 한양대학교 의류학과(박사)
2017~현재 한양대학교 ERICA 공학기술연구소 연구원
관심분야: Wearable Sensor, Smart textiles, and Smart clothing design

2002 POSTECH 기계공학과(공학박사)
2002~2005 KIST 지능로봇연구센터 선임연구원
2005~현재 한양대학교 ERICA 전자공학부 교수
관심분야: 로봇제어, 생체신호처리