국방로봇 신속 전력화를 위한 운용개념 수립 방법론 및 획득체계 개선방향

© Korea Robotics Society. All rights reserved.
Abstract
The purpose of this paper is to suggest the methodology for the establishment of operational concept for speed-up of defense robot and improvement direction of the defense acquisition system for the defense robot. In order to achieve this goal, the current defense acquisition system was analyzed into long-term planning, mid-term programming, and project execution stages. And I suggest the methodology for the establishment of operational concept for speed-up of defense robot and direction of development of the defense robot acquisition system considering the characteristics of the robot in terms of core technologies of robot, robot ecosystem and effectiveness-based-robot-design, respectively. Based on the methodology for establishment of the operational concept of defense robot and development direction of the defense acquisition system presented in this study, it will be possible to design efficiently the defense robot in the future.
Keywords:
Defense acquisition system, Defense robot, Core technologies of robot, Robot ecosystem, Effectiveness-based-robot design1. 서 론
세계 국방로봇의 시장은 날로 규모가 커지고 있다. Economic Review (2015. 4. 15)가 발표한 자료에 의하면, 2000년도 국방 로봇의 시장규모는 전체 로봇의 2.4%에 불과하였으나 2010년 도에는 5.1%로 증가하였으며, 2025년도에는 16.5%까지 확대 될 것으로 전망되고 있다. 그러나 한국의 경우, 2011년 국방로 봇 투자액이 429억이었으나 2013년에는 126억으로 오히려 감 소되었다. 이는 병력자원 감소와 미래 위협 증가에 따른 열악 한 안보환경 가능성 등을 고려할 때 심히 염려되는 현상이 아 닐 수 없다. 다행히 정부는 2013년부터 23,383억 원을 투자하 여 2025년까지 지상 및 해양무인체계 분야에서 세계 최고 수 준의 기술수준을 갖춘다는 목표를 설정하고 민군기술 융합과 협력, 로봇인력 양성, 기술교류 커뮤니티 운영 등 다양한 사업 을 추진하기 위해 노력하고 있다(전자신문, 2013. 06. 13.일자). 그러나 안보환경 변화와 과학기술 발전 속도, 그리고 늦은 개 발 시점 등을 고려하여 국방차원에서 국방로봇 신속획득을 위 한 방법론 및 제도 개선 노력이 필요한 시점이다.
국방로봇 개발과 관련하여 합참은 한국군 『미래전투체계 발전방향(2009)』에서 미래 핵심 무기체계로 무인장비를 선정 하고 현 기술수준과 보유 중인 무기체계를 고려하여 3단계에 걸쳐 약 30년 동안 핵심기술과 무인장비를 개발하겠다는 종합 계획을 제시한 바 있고[1], 국방기술품질원에서는 『2011-2015 세계 국방지상로봇 획득동향』에서 로봇은 기술 국력과 전력 의 집적물로서 세계는 지금 로봇의 전장 참여로 현실화된 로 봇전쟁 준비에 열중하고 있으며, 국가가 직접 나서서 획득절 차를 개선하고 기술진부화 방지를 위한 신속 획득제도를 도입 하며, 국가차원의 전략과 실행계획에 기초한 전용 연구센터를 운용하는 등 범국가적인 구체적 활동이 필요하다고 하였다[2]. 그러나 현재의 전력소요 획득체계는 단일무기체계를 전력화 하기 위한 프로세스로서 이미 개발된 무기체계 또는 융합적 성능이 덜 요구되는 무기체계와 성능개량 소요 등을 획득하고 자 할 때는 유용한 방법이나 전혀 새로운 운용개념이 적용되 고 융합기술이 접목되어야 하는 최첨단의 국방로봇 획득은 과 거의 패러다임에서 탈피하여 새로운 획득방법이 필요하므로 개선방향에 대한 연구가 요구된다.
2. 현재의 전력소요 획득체계 진단
일반적으로 전력소요 획득은 국방기획관리제도(Planning – Programming – Budgeting – Execution – Evaluation System)라는 큰 틀에서 진행된다. 국방기획관리제도는 국방정책과 군사전 략으로부터 각종 사업에 이르기까지 모든 국방업무의 추진과 정과 절차를 규정하고 그 흐름을 관장하는 기본 틀이다. 따라서 소요기획(Planning)-사업계획(Programming)-예산편성 (Budgeting)-사업집행(Execution)-분석평가(Evaluation)로 이어 지는 일련의 단계와 절차를 거치며 일사불란하게 추진되도록 체계화되어 있다[3].
2.1 소요기획
국방관리의 첫 단계에 해당하는 소요기획 단계는 국방정책 의 미래 비전과 발전목표, 추진방향과 지침 등을 제공하는 국 방기획체계의 출발점이다. 이는 중장기 위협양상을 분석・예 측하고 이에 기초하여 국방정책과 군사전략을 수립하며 사업 계획 및 추진 등 후속 업무에 방향과 지침을 제공한다. 이를 위 해 합참에서는 통합개념팀(ICT: Integrated Concept Team)을 구성하여 합동성 차원에서의 소요의 적절성을 검토하고 과학 적 분석결과 등을 반영하여 전력소요를 결정한다.
소요기획단계와 관련하여 이상경·한윤주(2016)는 최근 방 위사업 비리 논란과 사업관리 부실 등의 원인으로 방위사업 분야 인력의 전문성 부족문제를 지적하였다. 또한 미국은 2001년 9.11테러 이후 2013년 임시 국방획득규정(Interim DoDI 5000.02)을 만들어 신속획득을 위한 노력을 하고 있는 만큼 우 리나라도 급변하는 안보환경과 기술발전 등을 고려하여 신속 획득제도 도입에 대한 논의가 필요하다고 하였다[4].
2.2 사업계획
사업계획은 국방기획체계의 핵심으로써 소요기획(longterm plan)과 연도별 예산(annual budget), 전략(strategy)과 전 력(forces)을 연결해주는 역할을 한다. 전재국(2013)은 유사시 전략은 전력에 의해 구현되지만, 평시 군사력 건설과정에서 전략과 전력이 유기적으로 연결되지 않으면 전략개념에 맞는 전력이 획득되지 못하는 오류에 빠질 수 있으므로 평시 군사 력 건설의 중점은 전략개념에 맞는 전력을 획득하는데 두어야 하고, 유사시 군사력 운용의 목적은 평시에 획득한 전력을 효 과적으로 운용하여 전략목표를 달성하는데 두어야 한다고 하 였다[5].
국방로봇사업과 관련하여 계중읍(2014)은 국방로봇을 연 구개발하기 위한 추진방안으로 핵심기술(자율제어, 센서, 통 신 및 소프트웨어 등) 분야에 대한 국내 기술력을 비교검토하 여 기술개발 우선순위를 도출해야 한다고 하였다[6].
2.3 사업집행
획득사업의 효과적인 관리를 위해 획득기관은 사업추진 기 본전략에 따라 연구개발 또는 구매의 사업단위별로 통합사업 관리팀(IPT: Integrated Product Team)을 구성하되, 사업의 유 형 및 규모에 따라 관련 사업을 통합 관리한다. 특히, 무기체계 연구개발은 탐색개발-체계개발-양산단계로 구분하여 수행되 는데, 탐색개발단계에서는 연구개발 대상 무기체계에 대한 핵 심기술 획득계획에 따라 기술개발 업무를 수행한다.
체계개발단계에서는 소요결정 절차에 의하여 중기소요로 결정된 무기체계의 작전운용성능을 만족하는 무기체계를 설 계·시제품제작·시험평가를 통해 양산할 수 있는 무기체계를 개발하는 단계이다. 따라서 설계를 통해 체계의 통합성을 확 인하고 부분품으로부터 체계에 이르는 시제품을 제작하여 시 험평가를 통해 검증하며, 체계개발 완료된 무기체계를 양산하 는 순서로 진행한다[7].
사업집행단계와 관련하여 어하준(2016)은 『지상로봇무기 체계 개발에 대한 소고』에서 미래 지상로봇 개발을 위해 민간 분야의 기 확보된 플랫폼, 엔진, 자율주행 및 통신기술 등을 최 대한 활용하여 적정수준으로 개발할 필요가 있다고 하였다. 또한 주계약자의 독점적 수직계열화를 방지하면서 저비용 및 고 상호운용성을 갖춘 로봇의 신속한 전력화를 위해 개방형 아키텍처에 기반을 둔 로봇개발이 필요하다고 하였다[8].
2.4 국방로봇을 전력화하기 위한 현 획득체계 분석
현재의 전력소요획득체계는 기획과 계획, 예산 반영과 사 업 추진, 분석평가가 일련의 절차와 단계를 거치면서 체계적 으로 진행되도록 조직화되어 있다. 즉, 관련 기관의 협조와 견 제를 바탕으로 책임분야에서 전문성을 발휘하면서 문서화와 규격화가 진행되고, 개발과 분석평가가 병행되는 정형화된 체계를 갖추고 있다고 할 수 있다. 그러나 이미 개발된 무기체 계가 아닌 전혀 새로운 운용개념과 환경이 요구되는 로봇의 경우는 일부 보완이 요구된다. 강인원(2015)이 주장하였듯이 기술진부화 방지를 위한 신속획득방법 도입과 전용 연구센 터를 통한 통합노력이 요구되는 것이다[2]. 또한 기획단계에 서 수립된 개발계획이 각 단계를 거치면서 변경되거나 삭제 되는 경우가 발생하지 않아야 하며, 각 기능 간 획득조직의 분산 및 중첩으로 융합적 연계가 제한되지 않도록 협업이 필 요하다. 이와 관련하여 서상국·김용삼(2017)은 국방기획과 획득이 융합적으로 연계되도록 업무수행주체를 명확히 인 식하고 협업체계 강화를 통한 행정소요를 최소화해야 한다고 하였다[9].
3. 로봇의 핵심기술과 운용개념
로봇의 핵심 기술은 센서를 이용한 지각(Perception)과 마이 크로프로세서로부터 발전한 첨단 컴퓨터 기술에 의해 인식과 판단이 이루어지는 고도의 지능(Cognition) 그리고 전기 모터 등으로부터 시작한 이동성(Mobility)과 조작(Manipulation) 기 술로 이루어지는 행동(Action) 또는 동작(Motion)을 포함하는 데, 이들을 간단히 PCA (Perception, Cognition, Action) 기술이 라고 한다. 이 세 가지 기술은 각각의 기능이 독립적인 동시에 서로 연계성을 가지고 있으며, 보완적 역할이 되기도 한다. 따 라서 국방로봇의 운용개념을 수립할 때는 로봇의 핵심기술을 기초로 운용환경을 분석하여 운용개념에 적용하려는 작업이 필요하다[10].
3.1 지각(Perception) 측면에서 운용개념 분석
지각적인 측면에서 전투 환경을 분석할 때 영향요소는 탐 지거리와 관측 시계, 탐지센서(광학 또는 적외선 : EO/IR, 합성 개구레이더 : SAR 등), 전원, 연속 운용시간, 외부체계와 연동 (data-link), 안정성, 전송 거리 등이 될 것이다. 인간은 오감(청 각, 시각, 촉각, 후각, 미각)을 종합적으로 이용하여 더욱 정밀 한 표적인지가 가능하나, 인지 거리가 짧고 야간관측이 제한 되며, 기상과 전장 환경(소음, 두려움 등)의 영향을 많이 받는 단점이 있다. 반면에 로봇은 인지 거리가 길고 전장 환경의 영 향을 덜 받으면서 지속적 운용이 가능하나, 기상과 지형의 제 한을 받고, 전자파 및 신호 위주의 인지로 더욱 정밀한 표적식 별을 위한 기술적 발전을 필요로 한다.
3.2 인식(Cognition) 측면에서 운용 개념 분석
인식적인 측면에서 전장 환경을 분석할 때 영향요소는 상 황인식과 판단 능력, 상황조치, 통신능력(통달 거리, 중계, 전 송능력 및 속도, 방호 등), 기술구현 가능성(자율, 반자율, 타 율), 피·아식별 능력, 방향과 위치(GPS와 INS) 등이 될 것이 다. 인간은 독자적으로 상황을 인식하여 판단하고 행동할 수 있으며 피·아식별이 용이하다. 특히 통신장비를 운용 시 네트 워크중심전(NCW: Network Centric Warfare) 수행이 용이하 다. 그러나 보조 장비 제한 시 자기 위치 식별 및 방향유지가 어렵고 전장 환경(소음, 공포, 생리적 현상 등)의 영향을 많이 받는다. 반면에 로봇은 자동으로 자기 위치 식별 및 방향 설정 이 가능하고 통신지원 범위 내에서 인간 통제 하 과감한 운용 이 가능하다. 그러나 현 기술 수준으로 완전 자율성 확보가 제한된다.
3.3 행동(Action) 측면에서 운용 개념 분석
행동(Action) 측면에서 전투 환경을 분석할 때 영향요소는 이동성(최고속도, 항속거리, 이동 유형, 지형 극복 능력, 순발 력, 전원 등)과 화력(사거리, 발사속도, 살상반경, 명중률, 주/ 야 조준장치 등), 방호(소화기 방호, 스텔스 능력, 화생방 방호, 연막능력 등)가 될 것이다. 인간은 순발력이 뛰어나고 지형극 복 능력이 우수하나, 속도가 느리고 지속성이 약하다는 단점 이 있다. 군인이 보유한 개인 화기는 살상효과가 적고, 전장 환 경의 영향을 많이 받는다. 인간의 방호력은 매우 약해 생존성 이 취약하고, 보조 장비(방탄복, 보호의 등)를 착용 시 어느 정 도 보호를 받지만 완벽하지는 않다. 반면에 로봇은 속도와 항 속거리 면에서 우수하나, 평지와 도로를 제외한 산악 및 수목 등의 지형극복이 제한되고 지속운용을 위해서 전원공급을 필 요로 한다. 로봇시스템의 화력은 탑재무기와 탄약 휴대 량을 고려 시 효과가 매우 높고 운용성이 높다.
3.4 국방로봇 운용개념 수립 시 적용방안
국방로봇 운용개념과 연계하여 로봇 핵심기술 측면에서 우 선적으로 고려해야 할 사항은 국방로봇의 기획과 교리 분야에 근무하는 사람들의 과학기술적 전문성이다. 즉, 지각 측면에 서 요구되는 전기전자와 사물인터넷(IoT: Internet of Things), 센서 분야 등의 전문지식과 함께 인식측면에서 요구되는 인공 지능(AI: Artificial Intelligence)과 정보통신기술(ICT: Information Communication Technology), 그리고 행동 측면에서 요구되는 기계공학 및 물리학 분야의 기술적 전문성을 국방로봇 운용개 념과 접목시키는 능력이 필수적이다.
둘째, 국방로봇 운용환경 분석에 대한 전문성이 필요하다. 로봇의 핵심기술을 전장상황에 적용하여 분석하고 필수소요 를 도출하기 위해서는 지형적인 혜안과 함께 전장에서 로봇이 운용되는 모습을 싸우는 방법과 연계하여 운용개념을 설정할 수 있는 설계능력이 필요하다. 현재의 인간만이 싸우는 전장 환경을 로봇과 인간이 협업하여 싸우는 개념으로 전장운영 개 념을 구상하고 로봇설계에 필요한 핵심기술 소요를 도출하여 인간-로봇관계를 통합할 수 있는 기획능력이 요구된다.
셋째, 민군겸용기술을 적극 도입하여 적용하고, 연구개발 을 통한 독자적 기술을 개발함으로써 한국적 지형과 전장환경 에 적합한 운용개념으로 발전시켜야 한다. 강인원(2015)이 강 조하였듯이 국내 기술수준 조사와 민군간 자원의 적정한 배분 기반 하에서 운용개념, 형태, 기동방법, 임무, 제어방식 등에 있어서 혁신적 방식에 의해 창생 및 결합된 로봇으로 전장에 서의 우위를 확보하고 국가경제에 기여할 수 있어야 한다[2].
4. 로봇생태계와 전투효과에 기초한 국방로봇 개발
로봇생태계는 인간과 로봇이 주어진 작업(task) 또는 설루 션(solution)을 수행하기 위해서 협업하고, 주변 환경과 조화를 이루는 시스템으로서 인간과 로봇이 별개가 아닌 하나의 유기 체로서 통섭(consilience)을 이루어 새로운 생태계를 만들어 가는 과정이다. 전투효과는 로봇이 전투조직의 일부 또는 전 부로서 전투에 참가하여 나타나는 전투결과이다. 따라서 국방 로봇을 설계할 때는 로봇생태계와 전투효과를 함께 고려하는 것이 필요하다.
4.1 로봇생태계와 국방로봇화 과정
로봇화의 기본과정은 현 작업을 분석한 뒤 로봇과 인간의 새로운 작업을 설계함으로써 미래에 새로운 인간과 로봇의 역 할이 정립되고 로봇이 설계되는 것이다. 이 사실은 국방로봇 설계과정에도 동일하게 적용될 수 있다[Fig 1]. 즉, 국방로봇화 를 추진하기 위해서 먼저 현 작업의 분석이 필요하다. 여러 가 지 전장 환경 변화에 따라 소요군의 사회적 요구가 발생하면 현 전장 여건과 전투수행 등을 고려하여 작업분석을 진행하게 된다. 통섭 차원에서 현재의 사회적 요구가 제기되면, 공존 차 원에서 작업(전투)의 분석과 군인과 로봇이 할 작업 설계를 위 하여 관계성 분석을 통하여 역할 분담을 하게 된다. 공존에서 중요한 개념은 ‘함께’와 ‘존재’가 될 것이다. 현재의 인간사회 에서는 인간들이 ‘함께’ 작업을 수행하며 ‘존재’가 가능하였 지만, 미래의 인간-로봇사회에서는 인간과 로봇이 ‘함께’ 작업 을 수행하고 ‘존재’하면서 공동 목표를 향해 나아가는 것이 중 요하다.

Defense robotization process
다음은 로봇 개발을 위한 융합단계이다. 앞에서도 설명되 었듯이 로봇은 이동성과 조작(M&M) 기반 하 개발이 가능토 록 설계가 되어야 하고, 로봇시스템은 로봇의 작업을 구현할 수 있도록 개발되어야 한다. 공존 차원에서 정의된 인간과 로 봇의 역할 분담에 따라 로봇과 로봇시스템이 인간사회에 융합 되는 개념으로 새로운 형상의 로봇과 로봇시스템의 설계가 이 루어진다. 이어서 미래의 공존 차원에서 인간-로봇시스템의 관계 정립이 필요하다. 군인의 작업과 로봇의 작업을 통합하 여 군에서 요구하는 설루션을 구현하기 위한 상호작용적 분석 이 요구된다. 군의 특성인 조직편성과 협동전투의 중요성을 고려할 때 일반적인 로봇설계보다 이 과정이 더 중요하게 주 목받는 이유이다.
4.2 전투효과와 국방로봇 설계
인간-로봇사회가 형성되는 로봇생태계 과정에서 효과기반 로봇설계를 할 때는 디자인적 사고가 필요하다. 국방로봇의 경우도 일반적인 로봇설계 개념에 따라 소요군의 운용개념과 필요성이 반영된 국방로봇 설계가 이루어져야 한다. 작업 기 반 로봇설계가 작업(task)을 수행하기 위한 로봇과 로봇시스 템을 설계하는 과정이라고 하면, 전투효과기반 로봇설계는 인 간-로봇시스템의 설루션을 구현하기 위한 로봇과 로봇시스 템, 인간-로봇시스템 설계 과정이 된다[11].
로봇이 포함된 새로운 로봇-인간사회 설계를 위하여 새로 운 작업을 설계하기 이전에 새로운 설루션(solution) 정의가 필 요하다. 로봇과 인간이 조화된 시스템의 효과로 나타나는 설 루션(solution)은 국방로봇의 경우 적군과의 교전결과 분석을 통하여 도출할 수 있다. 그러나 로봇을 도입하기 위해서는 새 로운 전투 수행방법이 요구된다. 따라서 설루션도 새로운 전 투효과(S1)가 나오도록 설계가 필요하다. 새로운 전투효과 (S1)를 기초로 새로운 작업(T1, T2)을 정의할 수 있다. 군인의 협동전투에 의한 전투효과를 S1이라고 하면 전투효과에 기초 한 새로운 작업(T1, T2)을 구상해야 한다. 새로운 작업(T1)은 새로운 군인(H1)의 작업이 되고, 새로운 작업(T2)은 새로 설계 되는 인간-로봇시스템의 작업이 된다. 새로 정의된 인간-로봇 시스템의 작업으로부터 새로운 군인(H2)과 로봇시스템이 정 의된다[Fig 2].

Effectiveness based robot design process
4.3 국방로봇 개발 시 적용방안
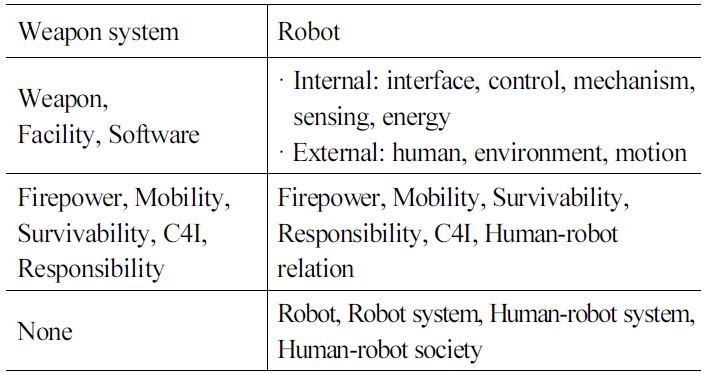
국방로봇화 과정을 고찰하면 일반 무기체계와 비교하여 몇 가지 특성 또는 차이점을 발견할 수 있다[Table 1]. 즉, 무기체 계의 구성은 무기, 장비, 부품, 시설, 소프트웨어로 이루어지지 만 로봇은 내부적 요소와 외부적 요소가 상호작용하여 작업을 수행한다는 것이다. 따라서 효과요소적인 측면에서 무기체계 의 효과뿐만 아니라 인간과 로봇의 상호작용(interaction)이 중 요한 비중을 차지하게 된다. 따라서 로봇생태계를 고려한 국 방로봇 설계가 필수인데, 이는 로봇의 효과는 이동성과 조작 이지만 로봇시스템의 효과는 작업(task), 인간-로봇시스템의 효과는 설루션(solution), 인간-로봇사회의 효과는 분(boon)으 로 구분되어 나타나기 때문이다 .

Difference between weapon and robot
로봇생태계에 기초한 인간-로봇관계를 설정하고 국방로봇 을 설계하기 위해서는 최초부터 소요군의 필요성(needs)에 맞 추어 인간중심의 디자인(HCD; Human Centered Design)으로 최적화할 필요가 있다[12]. 국방로봇 설계 이후에는 로봇부터 시작하여 로봇시스템, 인간-로봇시스템, 인간-로봇사회 순으 로 개발하게 되는데, 이 때 획득체계상 기획-계획-예산단계가 연계된 프로세스 통합이 필요하다. 기획단계에서 설계된 국방 로봇 시스템이 계획단계로 전환되면서 로봇생태계가 분리되 는 현상이 발생되지 않도록 해야 하며, 예산단계에서는 어떤 환경적 요인(예산 축소 또는 정치적 이유 등)으로 인하여 누락 요소가 발생하지 않도록 일관성 있는 사업추진이 필요하다.
둘째, 로봇생태계와 국방로봇의 운용방안을 연계시키는 로 봇설계가 필요하다. 일반적으로 인간-로봇사회는 국방로봇의 운용개념 및 운용지원과 연계성이 있고, 인간-로봇시스템은 편성과 관련되며, 로봇시스템과 로봇은 국방로봇의 운용환경 과 운용형태에 따라 결정된다. 따라서 효율적인 국방로봇 설 계를 하기 위해서는 운용지형에 따른 로봇 플랫폼을 단일화하 고, 운용개념과 편성에 따라 다양한 적용이 가능토록 로봇시 스템과 인간-로봇시스템의 개념을 확장한 모듈화 개념이 필 요하다.
셋째, 전투효과에 기초한 국방로봇을 개발하기 위해 전투 효과를 측정하기 위한 전투실험이 필요하다. 전투실험은 소요 기획 단계에서의 전투실험과 시제를 제작한 후 탐색단계에서 수행하는 기술/운용시험, 그리고 배치 전에 수행하는 시험평 가로 구분할 수 있다. 소요기획 단계에서는 실기동실험이 제 한되므로 M&S모델을 활용한 다양한 대안 검증이 일반적으로 진행된다. 그러나 우리나라에는 로봇을 검증하기 위한 전용 M&S모델이 제한되므로 외국에서 활용하고 있는 모델을 도입 하거나, 현존 모델 중 적용 가능한 모델을 선정하여 데이터베 이스와 시나리오를 작성하여 모의하는 방법이 필요하다. 탐색 단계에서는 소요기획 단계에서 검증된 대안을 시제로 제작한 후 전장 환경과 유사한 지형과 부대편성으로 실기동실험이 필 요하다. 육군의 경우, 소부대 훈련장에서 로봇과 소부대로 시 험훈련을 하고, 과학화전투훈련단(KCTC)에서 시행되는 실기 동-가상현실-워게임(Live – Virtual – Constructive) 통합훈련체 계를 이용하여 로봇과 실제 훈련부대가 통합훈련을 한다면 정 확한 전투효과 및 운용개념 도출이 가능할 것이다.
5. 획득체계 개선방향과 효과
5.1 획득체계 개선방향
국방로봇을 획득하기 위해서는 현 제도나 규정의 틀과 제 한된 예산, 안보여건 등 가변요소가 많은 것이 사실이나, 병력 자원의 감소와 전장 환경 변화 등을 고려하고 시대적인 변화 에 능동적으로 대처하기 위해서는 다음과 같은 창의적인 획득 체계 개선 추진이 필요하다.
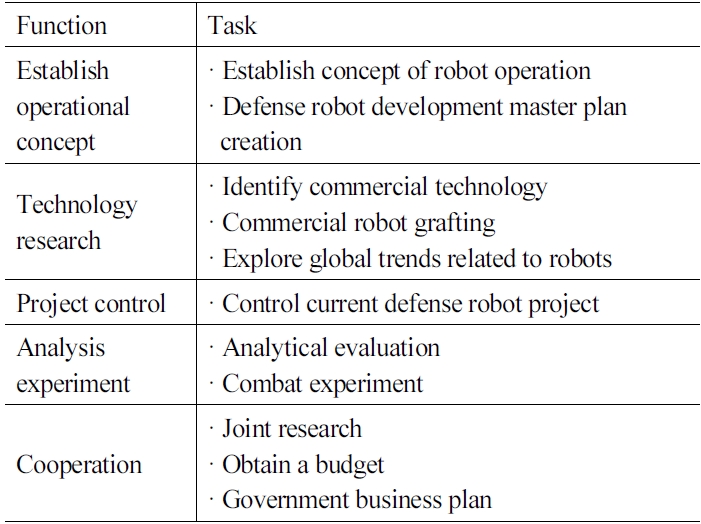
첫째, 전문가 집단으로 구성된 국방로봇센터를 국방부에 구성하여 국방로봇 종합계획을 수립하고 전반적인 소요기획 과 개발을 통제해야 한다. 국방로봇센터의 기능은 운용개념과 핵심기술 및 사업통제, 전투실험, 연구 및 대외협조의 과업을 수행하도록 [Table 2]와 같이 설정한다.
Function of defense robot center
국방로봇센터는 이런 제반 로봇전력화를 통합하여 소요기 획부터 사업계획 그리고 예산편성(안) 및 사업추진, 핵심기술 통제 및 관리, 분석실험까지 국방로봇 개발과 관련된 제반 분 양에 걸쳐서 컨트롤타워 역할을 수행할 수 있도록 기능을 보장 한다. 종합 계획은 합동차원의 미래 전장운영 개념과 로봇의 특성(로봇의 핵심기술, 로봇생태계, 전투효과에 기초한 로봇 설계 등), 첨단 과학기술이 모두 반영되도록 작성 되어야 한다.
미국의 경우, 국방로봇센터(Center for Defense Robotics)를 중심으로 미 국방고등연구소(DARPA), 공동기술협회, 국방 R&D센터 및 대학 산하 연구소 등이 협업하여 중장기 로봇개 발 프로그램인 통합로봇프로그램(JRP: Joint Robotics Program) 을 2013년부터 추진하고 있다[2].
둘째, 국방로봇 운용개념과 획득방법을 연결하기 위한 작 전운용성능(ROC)의 설정방법에 대한 개선이 필요하다. 국방 로봇 같은 무기체계는 운용개념 수립이 어려우므로 구체적이 기 보다는 포괄적으로 수립해야 하고, 이와 연계하여 작전운 용성능(ROC)을 설정할 때는 단순 포인트 값을 주는 것이 아니 라 범위(최솟값~최댓값)로 제시하고 진화적으로 획득해야 한 다는 내용을 포함할 필요가 있다. 국방전력발전업무훈령(국 방부 훈령 제1896호) 제33조에서는 과학기술 발전 속도와 합 동개념을 충족하기 위해 새로운 첨단기술을 체계에 적용 시 진화적 작전운용성능을 구상해야 하며, 항목별 범위형 작전운 용성능 설정에 대한 규정을 명시하고 있다[13].
진화적 획득을 위해 최초 획득하는 블록(block)-1(블록은 무기체계 성능개량을 목적으로 주요 설계 변경 시 이를 구분 하기 위하여 사용하며, 주로 지상무기 및 전투기, 유도탄 등에 적용)은 최초 성능과 최소 수량 획득을 목표로 하고, 획득추진 과정에서 ACTD (Advanced Concept Technology Demonstration) 개념을 도입하여 상용품을 장착하고, 시험적 운용을 통해 1년 이내에 로봇이 전력화 될 수 있도록 한다. 최초 전력화된 블록 (block)-1은 6개월~1년 간 운용하고 이를 통해 블록(block)-2에 대한 운용개념과 작전운용성능(ROC)을 구체화 한다. 그리고 소요량도 블록(block)-1 대비 늘리도록 한다. 이러한 획득절차 를 반복한다면 소요군이 원하는 성능의 완성도 높은 국방로봇 을 조기에 획득할 수 있을 것으로 생각된다. ACTD과제는 성 숙된 기술을 활용하여 3년 이내에 새로운 개념의 작전운용능 력을 갖는 무기체계를 개발하여 군사적 실용성을 입증하는 시 스템으로써 국방전력발전업무훈령 제34조에 명시되어 있다. 미국의 경우는 신속획득 대상 전력이 소요 제기되면 3개월 이 내에 계약을 체결하고 2년 이내에 야전배치가 가능하도록 하 고 있으며, 만약에 2년 안에 배치될 수 없을 경우, 부분 혹은 잠 정적 전력을 먼저 배치하는 방안도 고려하고 있다[4].
셋째, 신속획득을 위해 국방획득체계상의 절차를 통합하여 병행 추진하는 노력이 필요하다[Fig 3]. 즉, 소요기획부터 중기 계획, 예산편성, 사업집행 등이 일관성 있고 신속하게 처리하 기 위해서는 유사 업무의 통합과 명확한 문서작업 등이 필요 하며 관련 기관의 협조가 유기적으로 이루어져야 한다. 획득 체계의 효율성과 관련하여 서상국·김용삼(2017)은 무기체계 획득을 위한 소요기능이 합참에 있지만 핵심기술 기획은 방사 청이 담당하고, 국방중기계획은 국방부에서 수립하되 국방예 산은 방사청이 편성하여 집행하는 등 기획 관리의 핵심기능이 복잡하게 얽혀있어서 기관 간 협업을 위한 행정소요가 증가되 어 조직운영의 효율성이 저하된다고 지적하였다[9]. 따라서 국 방로봇이라는 국가 총역량을 집중하여 개발해야 하는 무기체 계는 국방획득체계의 각 기능들이 상호 유기적으로 연계되어 융합의 시너지 효과를 창출할 수 있도록 업무 프로세스를 혁 신하고, 조직을 효율적으로 정비할 필요가 있는 것이다.

Improvement direction of the acquisition system
넷째, 국방로봇 전력화와 병행하여 전투발전요소 개발도 필요하다. 로봇과 인간이 협업하여 전투하기 위해서는 로봇운 용방안을 전장환경과 인간-로봇관계를 고려하여 발전시켜야 한다. 4D(difficult, dirty, dangerous, dull한 작업을 지칭) 분야 를 담당할 로봇이 전력화되면 효과적 운용을 위해서 병과와 제대 또는 각 군별 구분이 불분명할 수도 있다. 가능한 모든 대 안을 고려하여 최적의 대안이 되도록 운용개념을 설정하는 것 이 중요하다. 또한 로봇 개발과 더불어 로봇 운용에 필요한 인 력양성과 교육, 기반시설 및 장비, 제도 및 규정 보완, 부대편 성 및 구조 등 국방로봇 운용의 완전성을 위한 여건조성도 병 행 추진되어야 할 것이다.
5.2 획득체계 개선효과
획득체계 개선에 따른 효과는 여러 가지를 고려할 수 있으 나, 거시적인 안목에서 보면 로봇전력화 기간단축을 통한 경 제적 효과와 전투상승효과를 고려할 수 있으며, 전투상승효과 는 다시 네트워크 구축에 따른 전투효과와 로봇을 이용한 교 전효과로 구분할 수 있다.
무기체계 전력화기간 단축을 통한 경제적 효과를 판단하는 것은 사업내용과 환경제약 사항 등을 고려할 때 쉽지는 않다. 그러나 일반적으로 과거의 데이터 분석을 통한 경험적 수치로 효과를 이해할 수는 있는데, 일렉트릭 사이언스(2016. 2)의 발 표에 의하면, GM의 자동차 사업의 경우 사업기간을 5년 단축 하였더니 약 1.7배의 경제적 효과가 있었으며, EB사 잠수함 사 업은 14년 기간단축에 약 2배의 경제적 효과가 있었다는 자료 가 있다.
국방로봇의 전력화를 위해서는 앞에서도 설명하였듯이 4 차 산업혁명개념에 의한 기반체계와 통제체계가 병행되어 구 축되어야 한다. 즉, 4차 산업혁명 개념이 구현되면 현재의 군 지휘통제체계가 계층형 구조에서 방사형 구조로 바뀌면서, 노 드와 연결선 증가로 인한 전투력 상승효과는 C2이론(1982년 Daniel M. Schutzer가 “C2 Theory and Measures of effectiveness” 에서 주장한 이론, 지휘통제시간의 변화가 해군의 플랫폼에 대한 생존확률, 할당 비율, 교환 비율에 어떻게 영향을 미치는 가를 연구하면서 지휘통제체계 개선 시 잔존 전투력 가치의 변화를 통한 C2체계 구축 전후의 승수효과를 구하는 방법을 제시)에 기초한 고전역학이론 적용방법에 따라 산출이 가능 하다. 미래 육군의 C4I체계 성능을 기준으로 판단하였을 때, 네트워크 파워는 보병소대의 경우 4.4배 증가하며 지휘통제시 간 감소에 따른 전투력 상승효과도 추가되는 것으로 확인된다 [14]. 또한 전투로봇과 보병소대가 편성을 이루어 전투를 할 경 우, 네트워크 효과를 반영하지 않은 경우에도 시뮬레이션 (Army Weapon Analysis Model: 지상무기효과분석모델) 결과 로 판단하면, 로봇화가 되지 않았을 경우보다 전투효과가 1.43 배 증가한 결과가 나왔다.
6. 결 론
국방로봇을 전력화하기 위해서는 현재의 전력소요 획득체 계를 개선할 필요가 있다. 로봇 관련 기술이 급속하게 발전하 고 인간과 로봇의 작업분석과 상호작용이 로봇설계에서 중요 한 역할을 차지하고 있으며, 전투효과에 기초한 효율적인 로 봇을 획득하기 위해서는 현재의 획득체계로는 일부 제한사항 이 따른다. 따라서 본 연구에서는 현 전력소요 획득체계를 진 단하고 로봇을 획득하기 위한 장단점을 분석하여 보았다.
효과적인 국방로봇 획득을 위해서 로봇의 핵심기술을 고려 한 국방로봇 운용개념 수립방향과 그 것을 구현하기 위한 전 문가 집단 구성과 민군겸용기술 도입, 국방로봇센터 편성 방 안 등이 필요하며, 로봇생태계를 고려하여 로봇의 소요기획과 계획, 예산편성의 일관성 있는 통합 수행체계 구축과 신속획 득제도 도입 등이 필요하다. 또한 효과에 기초한 국방로봇 설 계를 위해서 기획단계로부터 M&S모델을 통한 대안 검증과 시제를 활용한 전투실험, 시험평가 방법 등이 필요하며, 국방 로봇 개발과 병행하여 전투발전요소의 병행 추진도 요구된다.
미래 안보상황 변화와 위협의 다변화 등을 고려하여 국방 로봇의 전력화는 절실하다. 민과 군, 어느 한 분야에만 치우친 전문가가 아닌 학문과 업계, 군을 융합하고, 미래를 구상하고 조정 통제할 수 있는 통합형 전문가 집단을 중심으로 한국적 안보환경에 적합한 국방로봇 개발이 필요하다.
References
- J. E. Kye, H. E. Hong, S. B. Jeon, Y. H. Kim, K. H. Kim, S. I. Kim, J. C. Ju, J. H. Park, J. N. Park, K. T. Hwang, C. S. Lee, S. D. Hong, H. I. Ahn, K. W. Shin, and J. C. Im, “A Study on the Development Direction of Future Combat System of ROK,” DTaQ, Seoul, Korea, Rep. Ⅰ, Dec., 2009.
- I. W. Kang, “Overview,” 2011 ~ 2015 Global Defense Robot Acquisition Trend, DTaQ, 2015, ch. 1, pp. 26-30.
- J. K. Jeon, “Development Direction of National Defense Planning System,” Defense Policy Research, vol. 112, no. 4, pp. 89-124, Jul., 2016.
- S. K. Lee, Y. J. Han, “Analysis and Implications of Rapid Acquisition System in the United States,” Defense Weekly of KIDA, Seoul, Korea, Rep. 1628, Jul., 2016.
- J. K. Jeon, “The Role and Effectiveness of Mid-Term Defense Programming,” Defense Weekly of KIDA, Seoul, Korea, Rep. 1490, Nov., 2013.
- J. E. Kye, “Trends and Acquisition Strategies on Defense Unmanned Robot Core Technology,” Electronics and Telecommunications Trends, vol. 29, no. 3, pp. 118-130, Jun., 2014.
- J. K. Han, “Strengthening the application of modeling and simulation in defense acquisition phase,” Defense Weekly of KIDA, Seoul, Korea, Rep. 1603, Jan., 2016.
- H. J. Uh and H. M. Lee, “A Note on the Development of a Ground Robot Weapon System,” Defense Weekly of KIDA, Seoul, Korea, Rep. 1651, Dec., 2016.
- S. K. Seo and Y. S. Kim, “European Armed Forces Development System, Combat development System, Defense Planning Management System and Defense Acquisition System,” The Journal of Strategic Studies, vol. 24, no. 3, pp. 111-150, Dec., 2017.
- J. O. Kim, J. J. Kang, S. Y. Bae, S. D. Baek, and S. Y. Sin “Robot system and Task design,” Robots and Social Economy, Robot High School, 2013, ch. 2, sec. 1-2, pp. 180-188.
- H. S. Eom, “A design methodology of infantry platoon using combat robots based on the combat effectiveness,” Ph. D. dissertation, Kwangwoon University, Seoul, Korea, 2015.
- Julie A. Adams, “Critical Considerations for Human-Robot Interface Development,” AAAI Technical Report FS-02-03, Department of Computer Science Rochester Institute of Technology, pp. 1-4, Nov., 2002.
- Defense Business Management Regulations, Defense Acquisition Program Administration official order 432, Feb. 20, 2018.
- H. S. Jung, J. Y. Lee, and Y. H. Kim, “An Assessment of Combat Effectiveness for C4I System Considering Network Effect,” Journal of society of Korea industrial and systems engineering, Vol. 33, no. 2, pp. 23-32, Jun., 2010.

1986 육군사관학교 전사학과(학사)
1994 KAIST 산업경영학과(석사)
2016 광운대학교 방위사업학과(박사)
2017~경남대학교 군사학과 교수
관심분야: 국방로봇, 인간-로봇 상호작용, 무기체계 소요기획