다양한 직립 작업의 근육 활성도 경감을 위한 착용형 체중지지 시스템 개발

© Korea Robotics Society. All rights reserved.
Abstract
While working in an industrial environment which requires extended periods of upright posture; workers tend to develop muscle fatigue due to the constant load on lower-limb muscles. In addition, when working while bending knees; muscle fatigue of lower back and hamstrings is increased due to the abnormal posture. This can lead to damage of muscles, induce musculoskeletal disorders, and reduce long-term working efficiency. Recent medical studies have shown that long-term working in an upright posture can induce musculoskeletal disorders such as foot fatigue, edema, pain and varicose veins. Likewise, medical and rehabilitation expenses have grown due to the increase in musculoskeletal conditions suffered by workers. For this problem, we aim to develop a device that can reduce the physical fatigue on the lower limbs by supporting the weight of workers during the extended periods of upright and bending postures in the industrial environments. In this paper, we have designed and manufactured a wearable weight support system; with a user intention algorithm that the users can maintain various postures. For validation of the developed system, we measured the muscle activity of the users wearing the system with EMG sensors.
Keywords:
Wearable Robot, Support System, Relieve fatigue, EMG analysis1. 서 론
실제 산업 현장에서는 근로자가 장시간의 직립 상태 를 유지하거나 허리, 대퇴부에 긴장을 주는 자세에서 요 구되는 작업을 진행하는 경우가 많다. 또한 과도한 신체 적 긴장이 요구되는 작업 요건은 근로자에게 발의 피로, 부종, 통증을 유발하고, 하지 및 요추부에 근골격계 질환 을 야기하는 것으로 보고되고 있다[1].
인체의 상지 및 하지에 부착하여 근력을 보조하는 착 용형 외골격 로봇(Wearable exoskeleton robot)[2]에 대한 연구가 활발히 진행되고 있으나 기존의 보장구 및 외골 격 로봇들은 군인이나 장애인의 근골격계를 보조하거나 힘 증폭을 위한 장치이다. 따라서 일반적인 산업 현장에 는 적용하기 힘든 실정이다. 예를 들면 4절 링크 시스템과 직렬 탄성 구동기를 활용한 Roboknee[3]가 있다. Roboknee 는 장시간 보행의 보조를 위하여 근육의 내구성을 증진 할 수 있는 장치이지만, 사용자의 의도를 증폭하는 기능 을 가지기 때문에 고정된 자세를 유지하는 기능이 없다. S.H. Pyo[4]는 5링크 2자유도 기구를 기반하는 착용형 장 치를 고안하였다. 상황에 따라 힘 증폭 및 고정된 자세를 유지하는 기능을 모두 갖추고 있지만 실제 산업 현장에 서 발생되는 다양한 발목 자세를 보조해줄 수 있는 기능 이 구비되어 있지 않다. J.W. Yoon[5]의 연구에서는 확장 형 발목 보장구(Ankle Foot Orthosis, AFO)를 통하여 장 애인의 발목 보조를 통한 자세 안정성을 증진할 수 있는 장치를 개발하였다. 그러나 산업 현장에서 발생되는 다 양한 무릎 관절의 보조 기능이 미비하고, 다양한 발목 관절 자세의 보조 보다 인체 지지 범위의 확장을 통한 자세 안정성 유지 기능만 제공하는 단점이 있다. 기존의 대표적인 외골격형 장치인 H.A.L[6]과 Bleex[7]는 상하지 를 구성하는 각종 관절에 대한 힘 증폭을 지원할 수 있는 장점이 있지만, 복잡한 구동계통 및 제어 알고리즘이 요 구되고 시스템의 복잡성에 의한 가격이 굉장히 고가이다.
실질적으로 산업 현장에서 작업자를 보조하기 위한 기계 장치는 현장에서 정상적으로 신체활동 및 이동 가 능해야 하는 동시에 가장 많은 긴장을 받는 하지 관절 (무릎, 발목)을 보조할 수 있어야 한다. 또한 하지 보조 시, 사용자가 안정감을 느낄 수 있도록 자세 안정성 유지 를 위한 무게중심 지지점의 확장 기능이 요구된다. 그러 므로 복잡한 구조와 다양한 작업을 지원할 수 있는 외골 격형 로봇의 힘 증폭 기능보다 작업자가 근골격계에 부 담을 느끼지 않는 자세를 유지 시켜주면서 작업 능률을 향상시킬 수 있는 간단한 형태의 장치가 요구된다.
현재 작업자의 체중을 지지할 수 있는 상용 로봇 제품 은 Honda에서 개발한 Honda body weight System과 Noonee에서 개발한 Chairless Chair가 있다[8]. Honda에 서 개발된 로봇의 경우, 사용자의 자연스러운 하지 움직 임을 위해 구동기를 통해 지속적으로 추종해야 하므로 구동기에 의한 에너지 소모가 높다. 그리고 체중 지지가 필요한 상황에서 구동기의 위치 제어가 필요하므로, 체 중지지 상태에서도 꾸준히 배터리를 소모하는 단점이 있다. 아울러 구동기 및 전원부로 인한 중량과 부피 증가 로 사용자가 사용할 경우 발목에 무리를 준다[9].
Noonee에서 개발된 로봇은 4절 링크의 1자유도 시스 템 형태로써, Honda 시스템과 같이 사용자의 하지 동작 의 추종이 요구되어 에너지 소모를 한다. 하지만 의자의 기능을 수행하는 모드에서는 구동기에 부착된 수동 Locker를 이용하여 사용자의 무릎의 각도를 고정 시켰다.
그러나 상업화된 두 제품 모두 발목 보조 및 자세 안정 성 유지를 위한 무게 중심 지지점 확장기능이 없다. 자세 를 낮춘 직립 작업을 수행할 때 발의 뒷꿈치를 종아리 근육을 이용하여 들거나 상체를 앞으로 숙여서 작업을 해야 하는 단점이 있다. 인체가 완전히 직립을 하고 있을 때에는 무게중심의 지지점이 발뒤꿈치에 위치하고 있다 가 무릎 관절을 이용하여 무게중심이 내려갈수록, 발 끝 으로 무게중심 지지점이 옮겨가기 때문이다. 그러므로 기존 상업화된 체중 지지장치는 1 자유도 기구구조의 한계로 인하여 무릎 관절에 대한 보조만을 지원하기 때 문에, 낮은 위치의 직립 자세 에서 요구되는 발목 관절의 보조는 지원하지 못하는 단점이 있다.
따라서 본 논문에서는 기존 장치의 단점을 보완하기 위해 다음과 같은 조건을 만족하는 새로운 체중지지 장 치를 제안한다. 첫째, 작업자의 자유로운 움직임을 방해 하지 않는다. 둘째, 작업자의 체중을 지지를 통하여 다 양한 직립 자세에서 무릎 관절과 대퇴근을 보조한다. 셋 째, 낮은 직립 자세에서 발목 관절의 부담을 주지 않는 다. 넷째, 이동형(Portable) 시스템이므로 에너지 소비를 최소화하여 장시간 사용이 가능하게 한다.
이를 위해 5절 링크 2 자유도 기구 기반 착용형 작업 보조 장치를 고안하였다. 기존 장치와는 달리 하지 관절 을 추종하기 위하여 구동기 사용하지 않음으로써 구동 기에 의한 기계적인 저항감 발생 문제를 개선하였다. 또 한 구동기 및 전원부의 무게 감소를 통하여 착용성을 높였다. 아울러 사용자의 무게 지지를 위하여 구동기 대 신 전자 브레이크를 사용함으로써 에너지 소비율을 감 소시켰으며 2자유도를 이용하기 때문에 자연스러운 보 행 및 자유로운 직립 자세 보조가 가능하다. 그러므로 작업자의 움직임을 방해하지 않으면서, 다양한 직립 자 세에서 장시간의 작업에서도 근골격계 질환을 예방하고 피로를 경감할 수 있을 것으로 기대된다.
본 논문의 2장에서는 착용형 작업 보조 장치를 설계에 관한 설명을 진행하고, 3장에서는 시스템의 작동 시나리 오 및 상태 머신을 통한 제어기에 관한 내용을 수록하였 다. 4장에서는 근전도 분석[10]을 통한 검증과 사용자 평 가를 실시하였으며, 마지막으로 논의사항, 결론 순으로 진행한다.
2. 시스템 설계
Fig. 1에 도시된 것과 같이, 개발된 장치는 4개의 회전 대우와 1개의 미끄럼 대우로 구성된 5링크 시스템이다. 인체의 무릎 관절에 대응되는 회전 대우에 체중 지지를 위한 브레이크가 내장되어 있으며, 체중을 주로 지지하 는 역할을 수행하는 미끄럼 대우에도 브레이크가 내장 되어 있다. 사용된 두 브레이크는 무여자(demagnetized) 시스템으로 전원을 끊으면 잠김 상태(Locking)이 되고 전원을 인가하면 풀림 상태(Unlocking)이 되는 장치이 다. 따라서 제안된 시스템이 체중을 지지하는 상태가 될 때는 브레이크에는 전원이 인가되지 않는다.

Design of the proposed robot system
또한 브레이크의 풀림 상태를 유지하는 전원은 내장 솔레노이드(Solenoid) 스위치를 작동시키는 전력이면 충분하므로 구동기를 사용하는 시스템에 비하여 배터리 소모를 줄일 수 있으며 충분한 작동 시간을 확보할 수 있다.
사용된 브레이크가 모두 풀림 상태일 때는 2자유도를 가지는 기구로써 작동이 된다. 그러므로 착용자에게 하 지 움직임의 유연성을 확보할 수 있으며 사용자의 하지 움직임을 임의의 구동기로 추종할 필요가 없다. 반면 부 착된 브레이크를 통한 단속(斷續)을 통하여 브레이크가 적용된 대우의 자유도를 제한하면 시스템은 0자유도를 가지게 된다. 그러므로 브레이크 단속을 통한 시스템의 자유도 제어를 통하여 작업자가 마치 의자에 앉은 것과 같은 효과 공급할 수 있기 때문에 하지 근육의 활성도를 낮춰서 피로도를 줄일 수 있을 것으로 기대된다[11].
2.1. 시스템 메커니즘 및 작동 시나리오
Fig. 1에 도시된 것과 같이, 링크 1은 베이스 링크로써 사용자의 발목에 들어가는 힘과 체중을 지면으로 전달 하는 기능을 가지는 링크이다. 낮은 직립 자세에서 착용 자의 무게중심 벡터 작용점의 이동에 의하여 발생할 수 있는 낙상을 방지하기 위해 링크 1은 링크의 길이를 조 인트 2까지 확장하였다. 다시 말해 낮은 직립 자세에서 도 안정적인 무게 중심 지지점(Extended support point) 을 확보하는 설계를 하였다. 링크 3은 허벅지에 부착이 되는 링크로써, 브레이크가 내장된 실린더(Cylinder)와 무릎 조인트(Knee joint)가 잠김 상태일 때는 링크 3에 실린 체중을 실린더를 통하여 링크 1로 분산시키는 역할 을 수행한다. 실린더와 무릎 조인트의 브레이크가 풀림 상태에서는 무릎 조인트와 조인트 1의 움직임을 자유롭 게 허락한다.
Table 1은 로봇 모드에 따른 브레이크 활성화 상태 및 로봇의 자유도를 간략하게 정리한 것으로써, 본 시스 템을 구성하는 3가지 모드는 \‘보행 모드\’, \‘자세 바꿈 모드\’, \‘체중 지지 모드\’로 구성된다.
먼저 \‘보행 모드\’의 경우는, Fig. 2와 같이, Locker에 의하여 링크 1과 링크 2가 하나의 링크로 구성이 된다. 또한 무릎 조인트 및 실린더의 브레이크가 풀림 상태가 되면서, 4절 링크 1자유도 시스템으로 변화한다. 이 모드 에서는 사용자가 무릎 관절을 자유롭게 움직일 수 있으 므로 자유로운 보행을 허락한다.

Brake activation state and degree of freedom of the proposed robot according to operation modes

Operation of the proposed robot
\‘자세 바꿈 모드\’는 사용자가 원하는 직립 자세를 자 유롭게 변경할 수 있는 모드로써, 무릎 조인트 및 실린더 에 사용된 브레이크와 Locker가 모두 풀림 상태가 된다. Fig. 2와 같이, 5링크의 2자유도 시스템으로 변화하게 된다. 그러므로 Fig. 1에 도시된 발과 발목을 지지하는 링크 2와 허벅지를 지지하는 링크 3가 자유롭게 움직이 기 때문에 사용자가 원하는 직립 위치에 따른 하지의 움직임을 자유롭게 허락하게 된다. 이 때 시스템의 무게 를 지면으로 전달하는 역할을 하는 링크 1은 지면에 계 속 닿아 있으므로 시스템의 무게의 영향을 최소화 할 수 있다.
마지막으로, \‘체중 지지 모드\’는 특정 높이의 직립 자세에서 체중 지지를 받고자 할 때, 무릎 조인트와 실린 더에 내장된 브레이크를 고정함으로써 0자유도 기구가 되므로 체중 지지를 받을 수 있다. 또한, 브레이크가 내 장된 조인트를 고정하기 전에 사용자는 링크 2의 각도를 자유롭게 조절할 수 있으며, 무릎 조인트의 브레이크를 통하여 발의 뒤꿈치를 링크 2를 고정함으로써 발목 관절 의 보조까지 받을 수 있으므로 종아리 부위의 근육 활동 을 경감할 수 있는 특징을 가진다.
2.2. 기구 해석
Fig. 3은 개발된 장치의 기구 모델과 각 링크 길이의 파라미터 및 벡터 해석을 도시한 그림이다. 각 링크의 길이 선정은 일반적인 신체 크기 (키 175 cm, 체중 80 kg) 를 기준으로 착용이 가능하도록 임의 선정하였다.

Kinematic model of the proposed system (a) and thevectoranalysis(b)
Fig. 3(b)와 같이 루프 폐쇄 방정식을 이용하여 실린더 길이 를 구할 수 있다. 힘 F는 조인트 3에 가해진다고 가정을 하였다.
| (1) |
링크 길이는 r1 = 487mm, r2 = 196mm, r3 = 355mm 로 결정하였다. 한편 Fig. 3(b)의 은 Fig. 3(a)의 θ1에 상수 64도를 더한 값이다.
제안된 장치는 2자유도의 물체이기 때문에 면밀한 실 린더 길이를 설계하는 것이 중요하다. θ2는 0~90 deg, θ1는 0~30deg의 범위로 움직일 수 있다고 가정하였다. 사용자가 직접 움직이는 무릎 및 발목 각도에 따른 출력 실린더 길이를 식 (1)로 구하였고 Fig. 4에 나타내었다. 실린더 길이는 최소 445 mm에서 최대 775 mm이며 병 진 운동의 범위는 330 mm가 된다. 따라서 외부 실린더 는 445 mm이하로 제한되고 내부 실린더는 330 mm이상 445 mm이하의 범위를 가질 수 있도록, 외부 실린더 410 mm, 내부 실린더를 350 mm로 설계하였다.

Cylinder length design
2.3. 시스템 힘 해석 및 브레이킹 시스템 사양 해석
개발된 장치는 구동기 없이 브레이크의 단속을 통한 시스템의 자유도를 변형하는 시스템으로써, 시스템이 체중을 지지하고 있을 때 사용되는 무릎 조인트 및 실린 더 브레이크의 용량 산정이 중요하다. 제안된 시스템이 Fig. 3(a)의 링크 3에 하중을 받을 때, 무릎 조인트와 실린 더에 작용하는 힘을 도출하기 위하여 자코비안 (J)을 구 할 필요가 있다. 루프 폐쇄 방정식에 양변을 로 두고 미 분하면,
| (2) |
식 (2)와 같이 유도되고 는 로 나타낼 수 있으 며, 여기서 는 의 단위 벡터를 말한다. 양변을 로 분리하여 정리하고, 을 대입하여 에 관한 식으로 나타내면 다음과 같다.M3
| (3) |
따라서 자코비안 J 는 다음과 같이 구할 수 있다. 여기 서, 는 Z축의 단위 벡터를 말하고, S는 반 대칭 행렬 (Skew symmetric matrix)을 나타낸다.M4
| (4) |
| (5) |
식 (5)을 이용하여 join 2에 요구되는 토크 Tθ2와 실린 더에 작용하는 힘 Fd을 구할 수 있다. 그러므로 Fig. 3 (a)에 도시된 외부에서 주어진 힘 (800 N)에 의해 발생되 는 무릎 조인트의 토크와 실린더의 힘은 각각 5 Nm와 225 N이 된다.
회전 대우인 무릎 조인트에 적용되는 브레이크 기능 은 일반적인 회전형 브레이크 장치를 사용하는 것이 가 능하다. 하지만 실린더의 경우, 미끄럼 대우와 브레이크 기능을 동시에 실현하기 위하여 Fig. 5와 같이 레크 엔 피니언(Rack & pinion) 기계 요소를 활용하였다. 그림과 같이 피니언이 브레이크에 의하여 잠김 상태가 되면 레 크의 구속을 통하여 실린더의 잠금 상태를 구현할 수 있다. 따라서 최종적으로 실린더에 요구되는 브레이크 용량은 5.5 Nm로 산출 된다.

Cylinder braking system
해석된 결과의 브레이크 사양의 경우, 착용형 장비에 적용하기에는 무게 및 크기가 적절하지 않기 때문에 Fig. 5와 같이 기어박스를 적용하여 브레이크의 성능을 증폭 할 필요가 있다.
먼저, 상용 제품군에서 최대한 가벼운 전자브레이크 를 선정하였으며(미키풀리社의 전자브레이크 BXR-10R) 선정된 제품의 최대 토크 사양은 1.32 Nm이다. 따라서 브레이크에 사용된 감속기의 감속비는 1:5로 선정하였다.
2.4. 구조해석 및 실제 시스템 제작
제안된 장치는 착용형 장비이므로, 사용자가 착용했 을 때 불편함을 최소화 위하여 무게를 줄이는 것이 중요 하다. 그러므로 강성이 높고 성형성이 우수한 알루미늄 A1N00P 재질로 설계하였으며 빈 파이프 형태의 알루미 늄 링크를 적극 활용하여 설계하였다.
설계된 시스템의 구조적인 안정성 해석을 위하여, 구 조해석 프로그램인 ANSYS를 사용하여 응력 해석을 수 행하였다. Fig. 6(a)는 응력 해석을 위하여 80 kg의 사용 자가 양쪽 하지에 제안된 시스템을 착용하였을 때, 한 쪽 시스템의 응력 분포에 대한 외부 조건(Boundary condition) 을 도시한 그림이며, Fig. 6(b)는 외부 조건에 의하여 시 스템 구조에 작용하는 응력 분포 결과를 도시한 그림이 다. Fig. 6(a)의 외부 조건은, 간이 실험을 통하여, 무릎 각도를 45도로 설정한 다음, 체중계를 통하여 발바닥에 작용하는 무게를 개략적으로 구한 측정한 자료를 이용 하였다. 따라서, 응력 해석을 위한 무게 분포 조건으로 는, Fig. 6(a)와 같이 허벅지 링크 (링크 3)에 25 kg의 분포 하중, 발 링크 (링크 2)에 15 kg의 분포하중을 적용하였다.

Boundary condition (a) and stress analysis (b)
Fig. 6(b)에 도시된 것과 같이, 링크 1을 완전 구속한 상태에서, 각 조인트의 부의 핀을 강체라고 가정하였을 때, 가장 큰 응력이 발생한 지점은 조인트 1의 핀 주변부 에서 발생하였으며, 응력의 크기는 64.7 MPa로 해석되었다.
본 응력 해석은 시스템의 무릎 조인트 각도의 변화시 키면서(30도~60도, 간격 2도) 도출된 해석 결과이며, 가 장 큰 응력 집중 현상이 발생되는 무릎 조인트 각도는 46도였다. 이러한 결과는 사용된 재료의 항복강도인 280MPa에 대하여 3.375 안전률 (Safety margin)을 확보 할 수 있다고 생각된다. 아울러 좌굴 안전계수는 62.259 로 계산되었다.
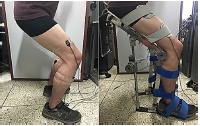
Fig. 7에와 같이 설계된 기구부에 사용자가 착용할 수 있도록 패드 및 벨크로를 이용한 구속 장치를 추가하였 고, 브레이크를 제어하기 위한 제어보드까지 장착하여, 최종적으로 제품을 구성하였다. 실제 구성 후, 제품 무게 는 한 쪽당 약 4.35 kg로 측정되었다.

Configured prototype
3. 체중 지지 및 자유 보행을 위한 상태 머신 제어
3.1. 상태 머신 제어를 위한 Insole 센서 제작
보행을 자유롭게 하기 위한 \‘보행 모드\’ 및 원하는 체중 지지 자세를 취하기 위한 \‘자세 바꿈 모드\’에 관한 의도 파악은 Fig. 8과 같이, FSR (Force Sensitive Resistor) 센서가 부착된 깔창(Insole) (이하 /‘FSR 기반 insole 시 스템/’)을 이용하여 파악하게 된다. 일반적으로 FSR 센 서는 입력되는 압력 값에 대하여 비선형적인 전압을 출 력하는 특징이 있으며, 특히 사용자의 의도파악을 위하 여 신발 속에 있는 압력 값을 사용하는 것은 정확한 의도 파악이 힘들다고 판단되었다.

Pressure sensor
그러므로 본 논문에서의 FSR 센서는 상대적으로 강한 의도(강한 압력)을 받을 때에만 ON 신호를 출력하는 형 식의 스위치 센서로써 사용되며, 각 하지에 있는 3개의 센서가 지정된 역치(Threshold) 값에 대하여 모두 ON 신호가 출력될 때에만 특정의도가 있는 것으로 판단하 여 상태 머신을 위한 신호로 사용된다. Fig. 9와 같이, 역치 값은 사용자가 기립한 상태에서 측정되는 FSR의 전압 값에 대하여 -10% 포인트를 줄인 값을 사용하였다.

Threshold values setting
또한 본 시스템의 체중 지지 모드는 여러 가지 직립 자세에 대응이 가능한 설계 특성을 가지므로 사용자가 원하는 자세 및 높이에서 체중 지지를 받기 위하여 물리 적인 스위치를 사용한다. 사용자가 직접 입력하는 스위 치의 사용으로 정확한 의도를 시스템에 전달 할 수 있으 며, 잘못된 의도 파악에 의한 낙상을 방지할 수 있다.
3.2. 상태 머신 제어
Fig. 10는 개발된 시스템의 상태 머신과 상태 천이를 위한 조건을 도시한 것이다. 기본적인 모드는 보행 모드 (Walking mode)이며, Fig. 8의 모든 센서가 지정된 역치 전압 값을 초과하면 시스템은 2자유도를 가지는 자세 바꿈 모드(Change mode)로 변하게 된다. 이 때, 사용자 는 자신이 원하는 높이와 자세의 직립 자세를 취한 상태 에서 체중 지지 모드(Sit mode)로 천이하기 위한 스위치 입력하면 자세 유지를 위한 보조를 받을 수 있다.

State machine of the proposed robot
체중 지지 모드에서 한쪽 하지의 기립 의도 측정은 지정된 역치 값을 초과할 때를 기준으로 측정이 되며, 만약 역치 값 이하가 되면, 낙상 방지를 위하여 즉각적으 로 무릎 조인트 및 실린더의 브레이크를 잠그게 된다.
마지막으로 모든 하지에 지정된 역치 값을 넘어서는 기립의도를 가지게 되면, 시스템은 다시 자세 바꿈 모드 로 바뀌게 되며, 안전한 사용을 위하여, 모든 브레이크가 풀렸다는 신호를 주기 위하여 비프음을 출력하게 된다. 이어서 사용자가 보행을 하게 되면 한쪽 Insole 센서의 3개의 FSR 센서 중 하나라도 ‘Off’ 상태가 되면, 사용자 가 다시 보행을 진행하는 것으로 판단되어, Locker가 잠 기게 되어 4절 링크의 1자유도 시스템으로 작동된다.
설계된 상태 머신에 대한 실험을 위해 제자리에서 보 행 후 자세 바꿈 모드 인식 기능과 체중 지지 모드를 시험을 하였다. 시스템은 정상적으로 자세 바꿈 모드를 인식 하였으며, 체중 지지 모드에서는 피험자의 무게(68 kg) 지지를 안정적으로 수행하는 것을 관찰할 수 있었다.
4. 사용자 평가
4.1. 실험의 목적과 시스템 평가를 위한 측정 값
제작된 시제품의 체중지지 효과를 검증하기 위하여 하지 근육의 활성도에 대한 객관적인 분석이 가능한 근전 도 분석(Electromyography)으로 근활성도를 측정하였다.
Fig. 11은 사용자 평가 시, 근전도 검사에 사용되는 근육 부위를 도시한 그림이다. 사용자 평가에서 측정된 근육은 대퇴의 신전 및 무릎의 굴곡과 신전을 관장하는 대퇴 이두근(Biceps Femoris. BF), 발목의 신전, 무릎의 굴곡과 발목의 굴절을 관장하는 비복근(Gastrocnemius. GT), 발목 관절의 움직임을 관장하는 전경골근(Tibialis Anterior.TA)으로 결정하였다.

Experimental muscle (a) BF, (b) GT, (c) TA
4.2. 실험 프로토콜
사용자 평가는 하지에 근골격계 관련 질환이 경험이 없는 성인 남자 5명을 대상으로 진행하였으며 평균 연령 은 28[세]이고, 신장 및 몸무게는 각각 170±2[cm]과 69±4[kg]이다.
실험 프로토콜은 Table 2에 도시된 것과 같이, 다양한 직립 자세에 대한 평가를 진행 하기 위하여, 무게중심의 높이에 따라 평가 자세를 구분하였으며, 각 자세에 대하 여 로봇을 착용하지 않았을 때 (대조군)와 로봇을 사용하 였을 때 (실험군)로 구분하여 Fig. 12에 도시된 근 육의 근전도 신호를 비교하였다.
EMG Experiment condition

Experiment results by posture
정확한 근전도 측정을 위하여 한 자세에 대한 한 번의 실험을 진행 한 후, 2분간 휴식기를 가졌으며, 각 자세에 대한 실험은 5번 반복 시행하였다. 평가 지수는 1회 실험 에 의하여 측정된 EMG 신호의 평균값을 이용하였으며, 최종 평가 지수는 산출한 EMG Data의 정규화 과정을 거쳐 실시 하였다. EMG 신호처리는 대역필터(band pass filter)를 이용해 10~500 Hz 범위의 주파수를 가지는 신 호를 수집하였으며, 샘플링 주파수는 1000 Hz이고 측정 단위는 uVs이다.
4.3. 결과 분석
Fig. 12는 5명의 실험자에 대하여, Table 1의 각 실험 자세 프로토콜에 대한 하지 근육별 근육활성도를 ‘Percentage of the peak muscle activity’에 따라 정규화 한 그래프이다[12]. Fig. 12(a)는 자세1번(서 있는 자세)에 대 한 결과로써, 개발된 장치가 체중을 지지하지 않는 상태 이며, 단순한 기립 상태를 의미한다. 자세 1에서의 EMG 정규화 데이터의 평균 값의 결과는 비착용 시의 결과 값의 104.37%로 나왔으며 이는 장비를 착용을 했을 때 와 착용하지 않았을 때 근육 활성도가 다르지 않다는 것을 의미 한다.
자세 2에서는 비착용 대비 장비 착용 시의 EMG 정규 화 데이터의 평균 값이 76%로 측정되었으며, 자세 3에 서는 59%, 자세 4에서는 52%의 데이터를 보였다. 이는 인체 무게중심점이 낮아지는 직립 자세일수록 제안된 장치에 의한 근육활성도의 차이가 커졌고 이는 체중지 지 장치가 체중을 효과적으로 지지하고 있음을 알 수 있다.
Fig. 13은 5명의 모든 피험자가 자세 2번을 취하였을 때, 대퇴 이두근의 근육 활성도 값이, 시스템을 착용하지 않았을 때와 착용하였을 때에 유의미한 차이를 객관적 으로 분석하기 위한 통계 분석을 실시한 결과이며, Table 3은 Fig. 13의 결과를 확장하여, 모든 실험 자세에서 모 든 하지의 근육 활성도가, 장비의 착용 및 비착용으로 유의미한 차이가 있는지 분석하기 위한 p-value를 연속 적으로 도시한 것이다. 그리고 p-value가 0.05보다 작거 나 같을 경우 유의미하게 차이가 있는 것으로 판단할 수 있다[13].

Statistical analysis of the muscle activation of right side BF in case of posture 2 protocol
Statistical analysis of the muscle activation of right side BF in case of posture 2 protocol
자세 2에서의 모든 근육에서 유의미한 근육 활성도의 감소를 보였으며 자세3에서 왼발 비복근, 오른발 대퇴이 두근을 제외한 근육에서 유의미한 활성도 감소를 보였 다. 마지막으로, 자세 4에서는 전경골근과 오른발 비복 근을 제외한 값들이 유의미한 활성도 감소를 보였다.
5. 논의사항
개발된 시스템을 통하여 사용자 평가를 진행 중에 링 크 1의 형상에 의하여 보행 과정의 발가락 떼기(Toe Off) 에서 발꿈치 딛기(Heel strike) 단계가 발생하는 유각기 (Swing phase)에서 링크 1이 바닥에 부딪히는 현상을 발 견하였다. 이러한 문제점은 링크 1을 통하여 무게중심 지지점 확장을 위해 링크의 길이를 늘림으로써 발생하 는 문제로 생각된다. 따라서 유각기에서 자연스러운 보 행에 방해를 주지 않으면서 무게 중심 지지점을 동시에 확장이 가능하도록 기구 설계의 개선이 필요한 것으로 판단된다.
또한 상태 머신 천이를 위한 FSR 기반 insole 시스템의 경우, Fig. 10의 ‘Sit mode’에서 ‘Change mode’로 바뀔 때 간헐적인 인식 오류가 발생하였다. 이러한 문제점을 사전에 인식하여 3개의 센서가 동일한 On/Off 신호를 발생할 때에만 상태 천이를 수행하도록 설계하였으나, 신발 내부에 설치된 insole의 신호 품질의 한계로 인하여 사용자 의도와는 다른 동작을 수행하는 경우가 있었다. 향후에는 의도 파악을 수행하는 센서 시스템을 다양화 하여 센서 융합을 통한 정확한 사용자 의도 파악 성능이 요구된다. 그리고 현재 시스템의 경우 ‘Change mode’ 에서 ‘Sit mode’로 상태 천이는 사용자가 직접 물리적인 스위치를 통하여 이루어지고 있다. 산업 현장에서 더욱 편리한 체중 지지 보조를 위해서는 물리적 스위치 없이 정의된 상태를 지능적으로 선택할 수 있는 고도화된 상 태 머신 설계가 요구된다.
6. 결 론
본 논문에서는 5링크 2자유도 시스템을 기반으로 브 레이크와 Locker의 상태 머신 제어에 따라 자유로운 보 행 및 다양한 직립 자세를 보조할 수 있는 시스템을 개발 하였다. 기존의 로봇과 달리 개발된 장치는 링크 브레이 크를 이용하기 때문에 시스템이 간단하면서 착용자의 체중을 지지할 수 있으며, 무릎의 각도만 보조하는 기존 장치와는 달리 하지 관절(무릎, 발목)에 대한 보조를 수 행할 수 있기 때문에 기존 제품보다 피로도를 많이 줄일 수 있을 것으로 생각된다.
체중 보조 기능의 객관적인 검증하기 위해 EMG 신호 를 이용하여 작업자 근육의 활성도를 측정하였으며, 검 증 결과 전체적으로 근육활성도가 낮아지는 경향을 확 인하였다. 특히 자세 1을 제외하고 자세 3에서 왼발 비복 근, 오른발 대퇴 이두근, 자세 4에서 양쪽 전경골근과 오른 비복근을 제외한 근육에서 모두 유의미한 값을 가 졌다.
향후 연구에서는 더 많은 사용자 실험을 통하여 개발 된 장비가 근육 활성도에 미치는 영향을 더욱 명확히 분석이 필요하며, 장시간 시스템을 사용함에 따른 근육 피로도 검증을 통하여 개발된 장비의 효용성을 객관적 으로 검증하는 것이 요구된다.
7. 사 사
이 연구는 2016년도 경상대학교 연구년제 연구교수 연구지원비에 의하여 수행되었음. 또한, 연구재단 중견 연구자지원사업 (2014R1A2A1 A11053989)에서 지원되 었음.
References
-
Hong, CW, Kim, YC, The Evaluation of Workload on Lower Limbs Muscles in Imbalanced Lower Limbs Postures Using EMG for Preventing WMSDs, Journal of the Ergonomics Society of Korea, (2009, August), 28(3), p81-85.
[https://doi.org/10.5143/JESK.2009.28.3.081]

- Ha, TJ, Lee, JS, Kim, DJ , Lee, JY, Augmentative Wearable Robot Structure Design Based on Working Motion Analysis, in The 7th Conference on National Defense Technology, Seoul, Korea, (2011, July), p633-640.
- Pratt, J.E, Krupp, B.T, Morse, C.J, Collins, S.H, The RoboKnee: An Exoskeleton for Enhancing Strength and Endurance During Walking, Robotics and Automation, 2004 IEEE International Conference on, p2430-2435, (2004, April), 3.
-
Pyo, SH , Yoon, J, Oh, MK, A novel robotic knee device with stance control and its kinematic weight optimization for rehabilitation, Robotica, (2014, June), 32(8), p1245-1263.
[https://doi.org/10.1017/s0263574714001453]
-
Yoon, JW, Kumar, R. P, zer, A, An adaptive foot device for increased gait and postural stability in lower limb orthoses and exoskeletons, International Journal of Control, Automation and Systems, (2011, June), 9(3), p515-524.
[https://doi.org/10.1007/s12555-011-0311-3]
-
Hayashio, T, Kawamoto, H, Sankai, Y, Control method of robot suit HAL working as operator's muscle using biological and dynamical information, Intelligent Robots and Systems, Control method of robot suit HAL working as operator's muscle using biological and dynamical information IEEE/RSJ International Conference on, (2005), p3063-3068, .
[https://doi.org/10.1109/iros.2005.1545505]
-
Zoss, A. B, Kazerooni, H, Chu, A, Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX), IEEE/ASME Transactions On Mechatronics, (2006), p128-138, .
[https://doi.org/10.1109/TMECH.2006.871087]
-
Ikeuchi, Y, Ashihara, J, Hiki, Y, Kudoh, H, Noda, T, Walking Assist Device with Bodyweight Support System, Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on. IEEE, (2009), p4073-4079.
[https://doi.org/10.1109/iros.2009.5354543]
- Lee, IS, Jung, MK, Kee, DH., Evaluation of postural load of varying leg postures using the psychophysical scaling, Journal of the Economics Society of Korea, (2002), 21(4), p47-65, .
- Bae, DC, Chang, SR, An EMG Analysis Study of Grinding Work by Posture and Working Time, Journal of the KIIS, (2001), 16(1).
-
Mananas, M.A, Rojas, M, Mandrile, F, Chaler, J, Evaluation of muscle activity and fatigue in extensor forearm muscles during isometric contractions, Engineering in Medicine and Biology Society, 27th Annual International Conference of the IEEE, (2005), p5824-5827.
[https://doi.org/10.1109/iembs.2005.1615813]
-
Keselman, H.J, Huberty, C.J, Lix, L.M, Olejnik, R.A, Cribbie, R.A, Donohue, B, Kowalchuk, R.K, Lowman, L.L., Petosky, M.D, Keselman, J.C, Statistical practices of educational researchers: An analysis of their ANOVA, MANOVA, and ANCOVA analyses, Review of Educational Research, (1998), 68(3), p350-386.
[https://doi.org/10.3102/00346543068003350]
- Hong, S.Y, Lee, S.H, Yoon, H.R, Cho, S.H, The study of muscle fatigue index searching in terms of median frequency analysis of EMG signals during isotonic exercise, Journal of Biomedical Engineering Research, (2003), 24(3), p175-181.
2014 경상대학교 기계항공공학부 졸업(학사)
2014~ 경상대학교 기계항공공학부 수료(석사)
관심분야: 메카트로닉스, 제어 공학

2010 경상대학교 기계항공공학부 졸업(학사)
2012 경상대학교 기계항공공학부 졸업(석사)
2012~ 경상대학교 대학원 기계항공공학부 재학(박사)
관심분야: 메카트로닉스, 로보틱스, 휴먼-로봇 인터페이스, 비선형제어.

2014 경상대학교 기계항공공학부 졸업 (학사)
2017 경상대학교 기계항공공학부 졸업 (석사)
2017~ 경상대학교 대학원 기계항공공학부 재학(박사)
관심분야: 재활 로봇, 동역학 해석, 메카트로닉스

2005 광주과학기술원 기전공학과 졸업 (박사)
2005 한국전자통신연구원 지능형로봇단 선임연구원
2010~ 미국립보건원 박사 후 과정
2005~ 경상대학교 기계항공공학부 교수
관심분야: 재활 로봇, 바이오 메카트로닉스, 가상현실인터페이스