착용형 전동 목발 제어시스템
†Corresponding author: Electornic Systems Engineering, Hanyang University, Hanyangdaehak-ro 55, Sangnok-gu, Ansan, 426-791, S. ( cyj@hanyang.ac.kr)
© KROS
Abstract
This paper proposes a wearable and motorized crutch control system for the patients using the conventional crutches. The conventional crutches have a few disadvantages such as the inconvenience caused by the direct contact between the ground and the armpit of the patients, and unstable gait patterns. In order to resolve these problems, the motorized crutch is designed as a wearable type on an injured lower limb. In other words, the crutch makes the lower limb to be moved forward while supporting the body weight, protecting the lower limb with frames, and rotating a roller equipped on the bottom of the frames. Also the crutch is controlled using the electromyography and two force sensing resistor (FSR) sensors. The electromyography is used to extract the walking intention from the patient and the FSR sensors to classify the stance and swing phases while walking. As a result, the developed crutch makes the patients walk enabling both hands to be free, as if normal people do
Keywords:
Crutch, electromyogram, rehabilitation, aid, gait, walking1. 서 론
인간의 보행은 일상생활을 유지하기 위한 가장 기본적 인 이동 수단이다. 이는 정상인 뿐만 아니라 신체가 손상 된 사람에게도 중요한 목표가 되고 있다. 최근 교통사고, 산업재해, 스포츠 및 레저 활동으로 인한 각종 사고가 빈 번해지고 의학의 발달로 인하여 사회가 노령화 되면서, 사 람의 신체가 손상될 가능성이 증가하고 있다[1]. 이에 따라 사람의 손상된 신체부위를 보완하고 일상 생활을 수행하 는 능력과 재활능력을 제고시키는 보행 보조기에 대한 관 심이 높아지고 있으며[2], 휠체어, 전동스쿠터, 보행기 등의 다양한 보행 보조기가 상용화되어 있다. 또한 척추손상 및 고관절 이하의 근력을 보조하는 외골격 타입의 로봇[3][4], 인공근육을 이용하여 족하수(Foot Drop)를 방지하고 정상 보행을 가능하게 하는 능동형 단 하지 보조기(Ankle Foot Orthosis, AFO)[5], 슬관절의 재활 및 보행을 돕는 보조기[6] 등과 같은 로봇 기술을 적용하여 환자의 편의를 도모하기 위한 연구가 활발히 진행되고 있다. 그러나 이러한 연구 대상은 단 하지의 골절, 염좌 등의 상해로 인한 깁스 환자 에게는 적합하지 않다. 이러한 환자들의 대부분은 부분 체 중지지(Partial Weight-Bearing, PWB) 조절능력이 뛰어난 목 발을 사용하게 된다[7].
목발(Crutch)은 지팡이(전체 보행 보조기 중 19.4% 점유) 와 척추 및 상∙하지 보조기(전체 보행 보조기 중 10.5%) 다음으로 가장 많이 사용되는(전체 보행 보조기 중 목발 9.1% 점유) 보행 보조기이다[8], 종래기술에 따른 수동형 목 발의 종류에는 겨드랑이와 손잡이에 기대어 몸을 지탱하 는 표준형 액와(겨드랑이) 목발, 상지 주관절 이하에 구비 된 전완 커브와 손잡이를 이용한 로프스트랜드(Lofstrand) 목발 등이 있다[9]. 이 중, 액와 목발은 대표적인 목발의 형 태로써 외측 안정성과 균형 능력을 증가시킴으로 하지 손 상으로 인한 일시적인 보행 장애가 올 경우 가장 많이 사 용된다[10]. 그러나 부적절한 액와 목발의 길이는 외상성 완 신경총 마비((Brachial Plexuss Injuries)나 액와 동맥(Armpiit Artery) 손상의 원인이 되기도 하며[11], 상해를 입은 하지가 지면에 접촉하지 않도록 하기 위해 환자 스스로 슬관절 또는 고관절을 굴절(Flexion))시켜야 하므로 보행 시 나쁜 자세를 유지하게 된다. 전동 목발의 개발 사례로는 전주대 학교에서 기존의 액와 목발의 형태를 가진 전동 1륜 구동 보행 보조기를 개발하였다. 이는 기울기 센서를 이용하여 보행 보조기 자세가 기울어짐에 따라 모터의 운동 방향과 속도를 결정하는 방식이다[12]. 이 또한 수동형 액와 목발과 동일한 구조를 사용하므로 유사한 문제점을 가질 수 있다.
본 논문에서 제안하는 전동 목발(Motorizzed Crutch)은 상 해를 입은 하지에 직접 착용 가능한 형태로써, 겨드랑이와 손이 아닌, 대퇴부로 체중을 지탱하고, 양 손이 자유로우 며, 정상 하지의 보행 방법을 모방하도록 목발 구조를 설 계하였다. 또한 하지 근육으로부터 얻은 근전도 신호를 이 용하여 환자의 보행 의지를 파악하고, 전동기를 사용하여 환자의 손상된 하지를 자연스럽게 이동시키는 방법을 제 안하였으며, 슬관절 이하의 단 하지 상해로 인하여 반드시 목발과 같은 보행 보조기가 필요한 깁스 환자를 대상으로 하였다.
본 논문의 2장에서는 전동 목발의 모방 동작을 위해 정 상 보행패턴을 분석한다. 3.11절에서는 2장의 정상 보행 분 석을 토대로 모방 동작을 위한 전동 목발의 기구부에 관 하여 기술한다. 3.2절에서는 환자의 보행의지를 파악하기 위한 근전도 신호처리에 관하여 기술한다. 4장에서는 본 연구의 실험 결과를 제시한다. 마지막으로 5장에서는 본 논문의 결론을 기술한다.
2. 정상 보행패턴과 전동 목발의 모방 동작
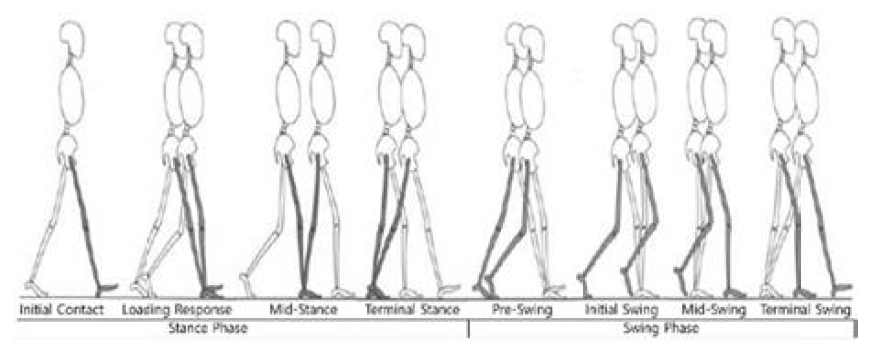
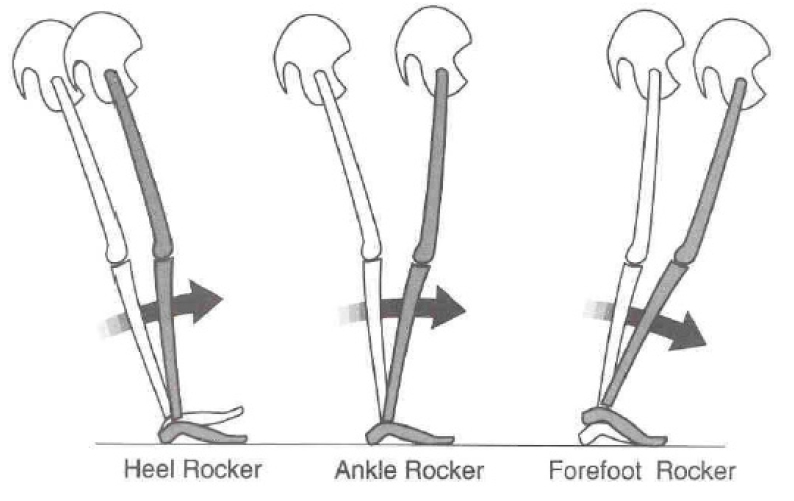
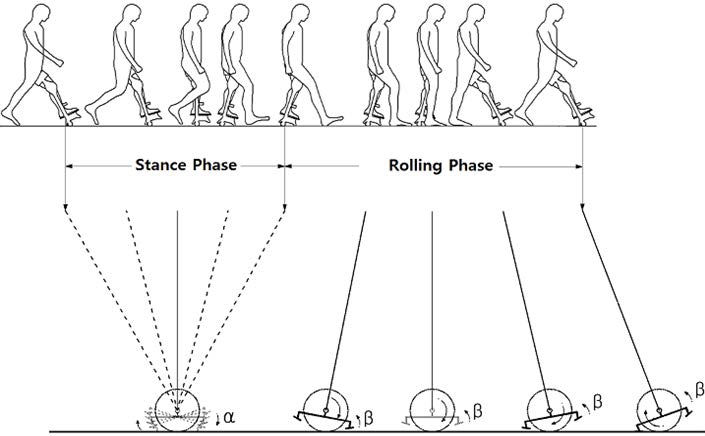
전동 목발을 이용한 보행 방법을 정상보행과 유사하도 록 만들기 위해서는 정상보행의 패턴을 먼저 이해하는 과 정이 필요하다. 인간의 보행은 기간에 따라 크게 입각기 (Stance Phase)와 유각기(Swiing Phase)로 나뉜다. 입각기는 하지가 지면과 접촉해 있는 전체 기간을 나타내고 유각기 는 전방으로 움직이는 발이 공중에 머무르는 시간을 말한 다[13]. 그리고 양 하지가 지면에 함께 접촉하는 순간부터 신체의 체중을 옮기며 서로의 역할을 바꾼다. 그림 1은 입 각기와 유각기를 각각 주기 별로 분류한 보행의 모습이다. 초기 접지기(Initial Contaact)는 고관절 굴절(Flexion)과 슬관 절 신전(Extension)으로 뒤꿈치가 먼저 지면에 접촉하는 모 습을 나타낸다. 부하 반응기(Loading Response)에는 뒤꿈치 를 기준으로 회전 운동에 의해 전족(Foorefoot)이 지면과 접 촉함으로써 체중을 앞으로 이동시킨다. 반대편 하지의 전 족은 저측 굴곡(Plantar FFlexion)을 이루고 고관절과 슬관절 의 굴절이 증가하면서 전-유각기(Pre--Swing)로 접어든다. 중간 입각기(Mid Stance)는 족관절의 회전 운동으로 체중이 이동한다. 반대편 하지는 중간 유각기(Mid Swing)로 접어 들며 슬관절이 중력에 의해 신전하며 이동한다. 말기 입각 기(Terminnal Stance)에는 전족의 회전 운동으로 뒤꿈치가 올 라가면서 체중이 이동한다. 반대편 하지는 말기 유각기 (Terminal Swing)상태가 되며 고관절과 슬관절이 각각 최대 굴절과 신전이 된다[13]. 그림 2와 같이, 하지의 모든 입각기 상태에서 슬관절은 신전 상태를 유지하며 족부의 회전 운 동에 의해 전진 방향으로 이동한다. 이 운동을 라커 (Rocker)라 하며 부하 반응기에는 뒤꿈치, 중간 입각기에는 족관절, 말기 입각기에는 전족을 중심으로 라커 운동이 발 생한다.
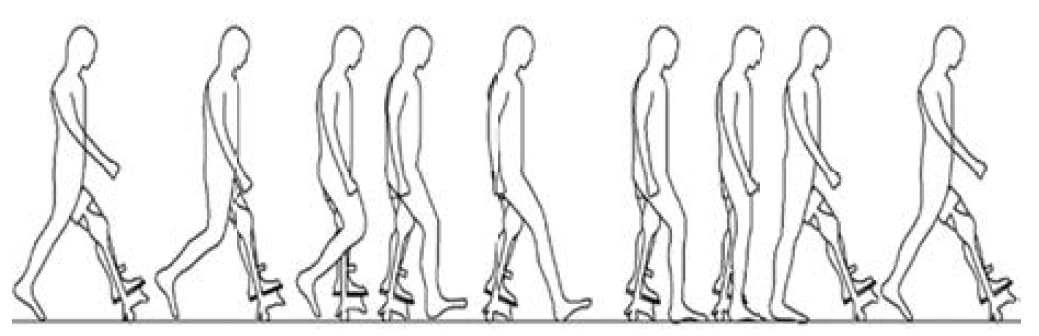
본 논문에서 제안하는 전동 목발은 상해를 입은 다리에 직접 착용하여 정상 보행패턴을 모방하는 것을 목표로 한 다. 전동 목발의 동작은 입각기에서 세 가지의 연속적인 라커 운동을 하나의 라커 운동으로 통합한다. 이는 슬관절 의 굴절 각도를 고정시키고 초기접지기의 뒤꿈치에서 발 생하는 라커 운동의 초기 각도와 전-유각기의 전족에서 발 생하는 라커 운동의 최종 각도를 사전에 고려함으로써 이 루어진다. 전동 목발의 유각기는 초기 유각기부터 말기 유 각기까지 지면에 접촉한 상태로 전동기의 동력전달에 의 해 진행하게 되며, 본 논문에서는 이를 전각기(Rollingg Phase)라 한다. 반대편 하지의 진행은 정상 보행의 동작과 거의 동일하게 된다. 따라서 전동 목발을 착용한 하지의 전각기와 정상 하지의 유각기를 통해 그림 3과 같이 보행 패턴을 생성할 수 있도록 구성한다.
3. 시스템 구성
본 논문에서 제안하는 전동 목발은 크게 기구부와 제어부 로 나눌 수 있다. 기구부는 기존 목발의 형태를 따르지 않으 며 정상 보행을 모방할 수 있는 목발 구조를 제시한다. 제어 부는 환자의 하지 근육으로부터 얻은 근전도 신호를 이용하 여 보행 의지를 파악하고 목발의 하단부에 장착된 스토퍼 (Stopper)를 이용하여 입각기와 전각기를 구분한다.
3.1. 전동 목발 기구부
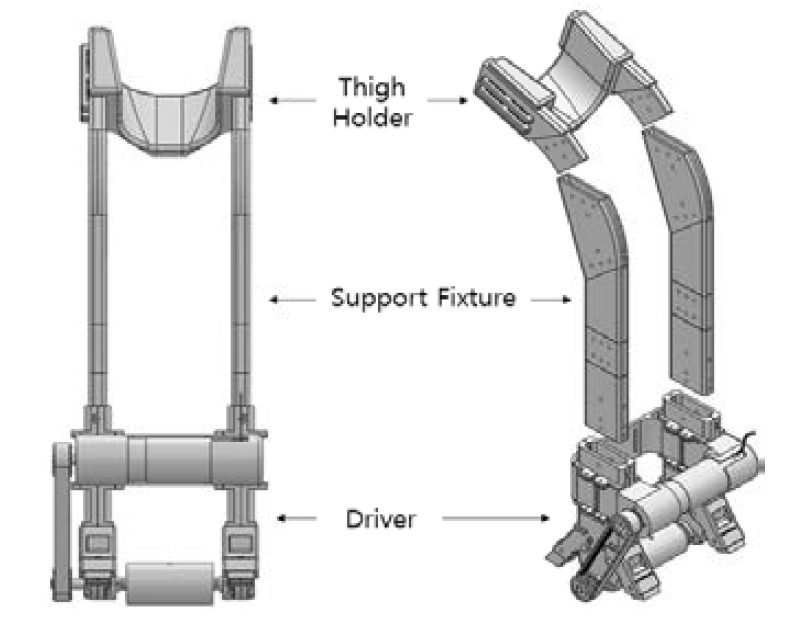
슬관절 이하의 단 하지 상해를 입은 깁스 환자가 보조 기 없이 보행이 불가능한 이유는 척추, 고관절 등의 상해 로 인한 것이 아닌, 단순 상해를 입은 단 하지와 지면과의 접촉에 의해 고통이 수반되어 입각기의 역할 및 체중 지 지의 역할이 불가능하기 때문이다. 따라서 이를 극복할 수 있는 구조를 통하여 정상 보행과 유사한 방법을 이용한 보행이 가능하도록 하는 것이 기구부의 역할이다. 기구부 는 그림 4와 같이 구동부(Driver), 지지부(Support Fixxture), 그리고 대퇴 고정부(Thiggh Holder)로 나눌 수 있다. 구동부 는 전동 목발의 하단부로써 동력을 이용하여 전동 목발을 구동시키는 역할을 한다. 전면에 모터가 장착되고 타이밍 풀리와 벨트(Timing Pullley and Belt)를 이용하여 하단의 롤 러(Roller))와 연결된다. 또한 단 하지의 뒤꿈치와 전족을 대 신 하는 스토퍼가 전∙후면에 장착되어 있다. 스토퍼 내부 에는 푸셔(Pusher)가 삽입되어 있으며 실제로 지면에 접촉 하는 부분은 푸셔가 담당한다. 입각기에 푸셔는 라커 운동 의 각도를 제한하며 전각기에는 보폭을 제한한다. 지지부 는 하지를 보조하고 체중을 지탱한다. 이는 하지의 양 측 면으로 세워져 있으며 슬관절 부위에서 굴절시켜 상단에 대퇴 고정부를 장착한다. 이 굴절은 상해를 입은 단 하지 를 지면으로부터 항상 들어올리고 신체의 체중을 겨드랑 이가 아닌, 대퇴부로 지탱하기 위한 고정부를 장착하기 위 함이다. 그림 5는 전동 목발을 착용한 환자의 보행과 이에 따른 목발의 동작을 나타낸다. 전동 목발의 입각기는 후면 의 푸셔와 지면이 접촉한 상태로 시작된다. 반대편 하지의 유각(Swinng)에 의해 전동 목발은 롤러의 축을 중심으로 α 방향으로 전면의 푸셔와 지면이 접촉할 때까지 기울어진 다. 보행 의지가 파악된 전동 목발은 전각기 상태로 접어 들게 되며, 전동기의 동력을 이용하여 롤러가 회전함으로 써 상해를 입은 하지를 전진 방향으로 이동시킨다. 이에 따라 목발은 β 방향으로 점차 기울어지게 되고, 후면의 푸 셔가 지면과 접촉하게 된다.
3.2. 근전도 신호처리
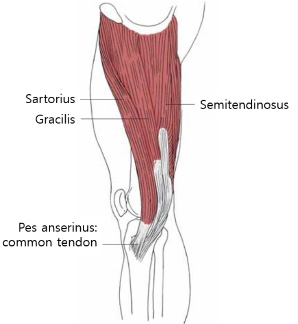
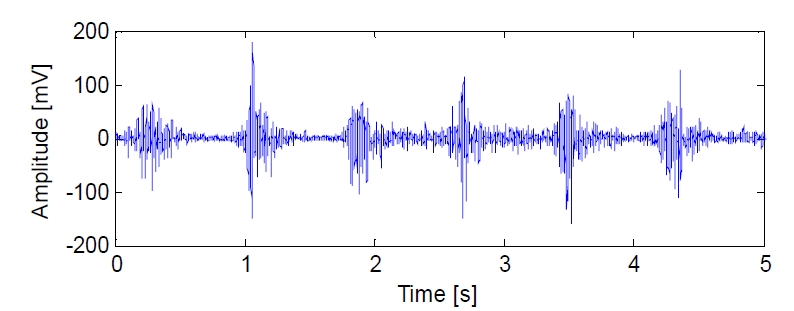
여러가지 생체신호 중 근전도 신호는 환자의 보행 의지 를 파악하고 전동 목발을 동작시키는 역할로써 사용한다. 인간의 근전도 신호는 수백~수천[uV]로 측정되는아주 미 세한 전기 신호이다. 이를 디지털 신호로 사용하기 위해서 증폭을 필요로 한다[14]. 전동 목발을 착용한 환자의 보행에 있어서 입각기 이후, 대퇴부를 굴절시켜야 한다. 그림 6과 같이 대퇴부의 굴절에 도움을 주는 근육은 대퇴전측근육 (Muscles of Anterior Thigh) 부위로써 그 중에서 표층면에 위 치한 봉공근(Sartorius)은 하지를 전진 방향으로 진행시키는 데 도움을 준다[15]. 따라서 봉공근 부위에 Ag/AgCl 전극을 부착하여 환자의 보행 의지를 파악하였다. 신호를 증폭하 기에 앞서, 5[Hz]의 차단 주파수(Cutoff Frequency)를 갖는 고주파 통과 필터(High Pass Filter, HPF)를 이용하여 신호의 DC 성분을 먼저 제거하고, 신호의 포락선(Envelope) 정보 를 얻기 위해 300개의 신호마다 RMS (Root Mean Squares) 를 취하여 신호처리 한다. 그림 7과 그림 8은 각각 원신호 에 HPF와 RMS를 취한 근전도 신호의 모습이며, 근육의 활성 정도에 따라 근전도 신호의 크기가 달라짐을 볼 수 있다.
3.3. 전동 목발 제어
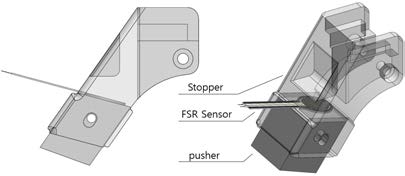
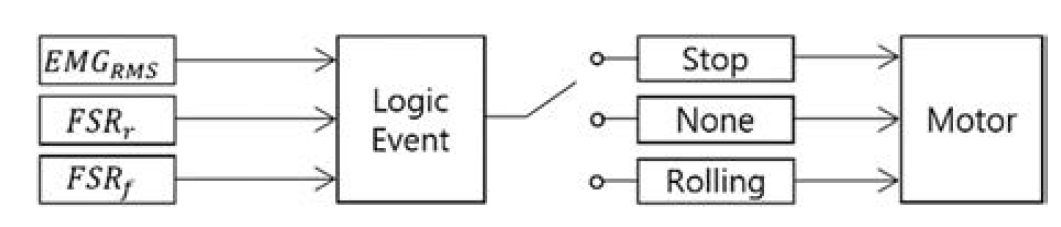
전동 목발을 착용한 환자의 전각기와 입각기를 구분하 고 모터의 동작을 제어하기 위해서 그림 9와 같이 스토퍼 내부에 압력측정 센서(Force Sensing Resistor, FSR)를 삽입하 여 지면과 푸셔의 접촉 유무를 판단한다. 그림 10은 제안 된 전동 목발 시스템의 전체적인 구성을 나타낸다. 환자의 보행 의지와 푸셔의 접촉여부에 따라 표 1과 같이 보행 상태를 판단할 수 있다. 근전도 신호는 환자의 의지에 의 해 얻어질 수 있으며, 두 개의 압력측정 센서 신호는 하지 에 착용된 전동 목발의 동작에 의해 결정된다. ‘Rolling’은 전동 목발의 동작, ‘Stop’은 정지, ‘None’은 정지 및 보행 의 지를 파악하기 위한 대기 상태를 뜻한다. 또한 각각의 상 태에 따라 전각기와 입각기로 나눠진다. 입각기 상태에서 정상 하지의 스윙 중, 갑작스러운 근전도 신호에 의해 전동 목발이 동작하는 것을 제한해야 한다. 이는 환자의 안전에 가장 중요한 역할을 한다. 전각기는 초기 보행을 시작하기 위해 압력측정 센서에 상관 없이 근전도 신호 만으로도 전동 목발이 동작하도록 구현한다.
4. 실험 결과
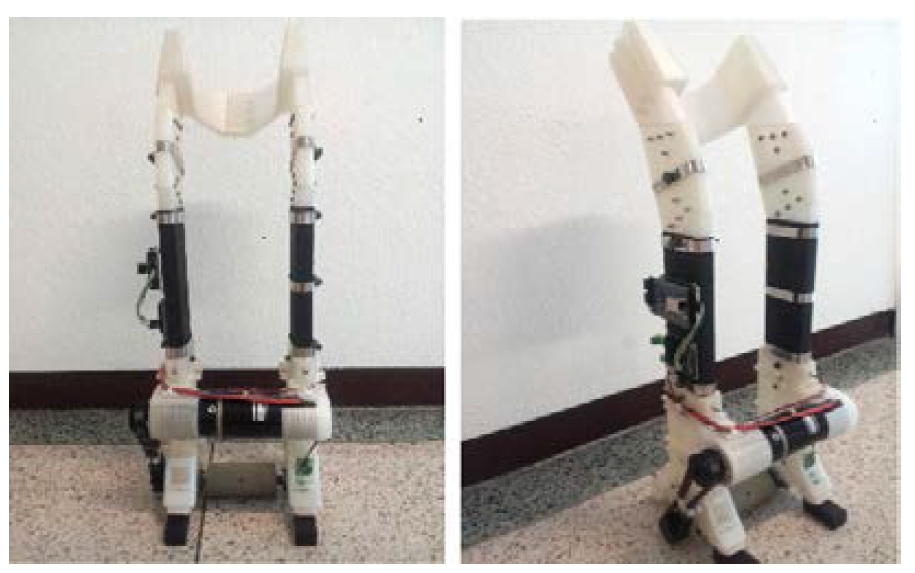
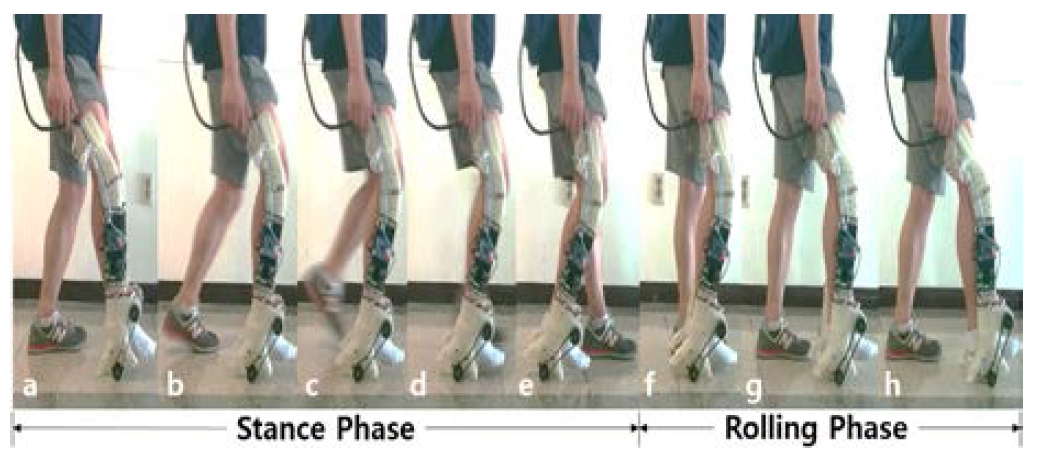
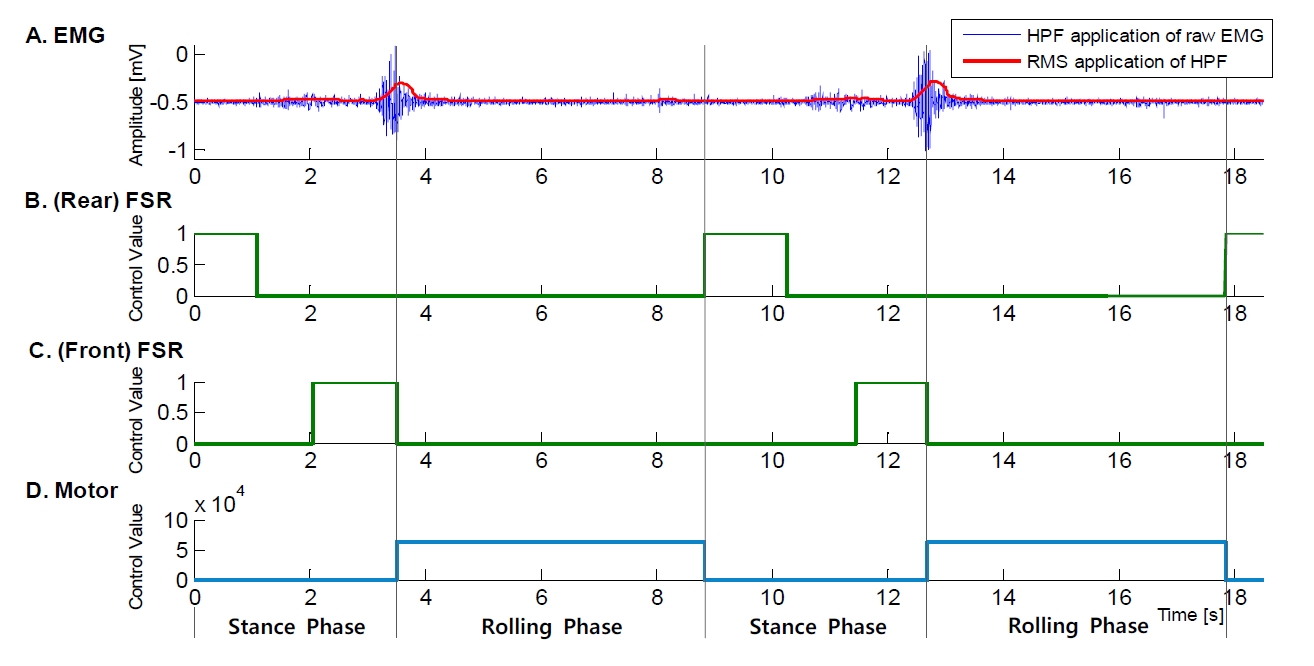
그림 11은 조립 완료된 목발의 모습이다. 기구부는 무게 를 최소화 하기 위해 전동 목발을 30여개 부품으로 나누 어 3D 프린터를 이용하여 제작되었다. 그림 12는 전동 목 발을 착용하고 보행하는 모습을 나타내며, 하단의 a~e까지 는 입각기로, f~h까지는 전각기로 구분할 수 있다. 그림 13 은 전동 목발을 착용하고 보행하는 동안 발생하는 근전도 신호와 압력 신호의 상태를 각각 A, B, C로 구분하여 나타 내었으며, 모터의 동작은 D에서 나타내었다. 후면 푸셔와 지면과의 접촉에 의해 그림 13.B 그래프의 압력 신호가 초 기에 활성화된다. 이는 그림 12.a 상태에 해당되며 전동 목 발은 입각기 상태로 접어든다. 체중을 대퇴부로 지탱하고 정상 하지의 스윙으로 인하여 목발의 자세가 그림 12.b~d 에서 보여지는 것과 같이 전진 방향으로 기울어지면서 롤 러의 원형 둘레를 이용한 라커 동작을 가지게 되는 모습 이다. 그림 12.e에서 보여지는 바와 같이 정상하지가 지면 에 착지함으로써 전동 목발의 전면의 푸셔와 지면과의 접 촉에 의해 그림 13.C의 전면의 압력 신호가 활성화되고 대 기 상태로 접어들게 된다. 전각기 상태로 접어든 전동 목 발은 실험자의 봉공근에서 취득된 근전도 신호에 의해 보 행 의지가 파악되며, 이는 그림 13.A와 같이 나타내게 된 다. 이와 동시에 모터가 그림 13.D와 같이 동작하게 되고 그림 12.f~h까지 전동기의 동력 전달에 의해 롤러를 회전 시킴으로써 전동 목발이 착용된 하지를 후면의 푸셔가 지 면과 접촉할 때까지 전 방향으로 이동시키는 모습을 가지 게 된다. 이후, 전동 목발을 착용한 보행 동작은 동일한 과 정을 반복하게 된다. 모든 구간에서 전동 목발을 착용한 하지는 항상 지면으로부터 들어올려진 모습을 확인 할 수 있다.
5. 결 론
본 연구는 슬관절 이하의 단 하지 깁스 환자를 대상으 로 하였다. 기존 목발 등의 보행 보조기가 아닌, 상해를 입 은 하지에 직접 착용하는 방식의 구조를 채택하고 직접 설계하여 제작함으로써 정상 보행 패턴을 모방하도록 하 였다. 또한 보행 시 필요로 하는 하지의 근육으로부터 얻 어진 근전도 신호를 이용하여 보행 의지를 파악 하고 두 개 의 압력 측정 센서를 이용하여 입각기와 전각기를 구분함에 따라 모터의 동력 전달에 의해 롤러를 구동시키는 방식으로 전동화된 목발을 개발하였다. 이는 기존의 목발이 가지고 있는 단점을 해결하고, 환자의 보행을 보조하기 위한 목적 으로 개발되었으며, 양 손이 자유로운 상태에서 정상인과 유사한 보행 방식을 환자에게 제공해 줄 수 있다.
본 연구에서 개발된 목발은 소수의 실험자 치수에 적합 하도록 설계되었다. 다수에게 전동 목발을 적용하기 위해 서는 지지부의 길이 조절 장치를 이용하여 하지의 치수에 적합하도록 전동 목발의 길이를 조절할 수 있어야 한다. 또한 강성이 큰 재질을 이용한 프레임 설계를 통해 전동 목발의 외형을 제작해야 한다. 단순히 무게만을 최소화 하 고 실험 테스트를 위해 플라스틱 재질의 폴리유산 (Polylactic acid, PLA)을 이용하여 제작된 전동 목발은 다수 의 체중을 지탱하기에는 무리가 있기 때문이다. 뿐만 아니 라 입각기 상태에서 체중에 의한 모터의 역회전을 방지하 고 안전을 도모하기 위해 실험자의 체중에 적합한 기어 비(Gear Ratio)을 가진 기어박스를 장착하였다. 이는 체중에 따라 기어비가 변경되어야 하는 번거로움을 가지고 있다. 따라서 체중에 대한 기어비가 아닌, 전각기에 하지를 이동 시키기 위한 최소한의 기어비를 적용하고 오로지 동력에 의해서만 동작 가능하도록 모터와 롤러의 연결 과정에서 웜 기어(Worm Gear)와 같은 일방 기어 장치를 이용하여 입 각기 구간에서 체중에 의한 모터의 역회전을 방지할 수 있는 구조적 장치가 필요하다. 이와 같은 개선점을 향후 연구 방향에 고려 함으로써 좀 더 최적화 된 전동 목발을 기대해 볼 수 있다.
REFERENCES
-
Kim, Y. E, Jeon, E. S, “Analysis of muscle force variation in the lower extremity”, The Korean Society of Mechanical Engineers, (2000), 1(1), p251-267.
[https://doi.org/]

-
Park, H. S, Ok, D. M, “Ergonomic analysis and design of an axilla crutch through QFD and discomfort experiments”, Journal of the Ergonomics Society of Korea, (2000), 27(4), p103-108.
[https://doi.org/10.5143/jesk.2008.27.4.103]
-
Chen, C, Zheng, D, Peng, A, Wang, C, Wu, X, “Flexible design of a wearable lower limb exoskeleton robot”, (2013), Proceedings of the IEEE International Conference on Robotics and Biomimetics, p209-214.
[https://doi.org/10.1109/robio.2013.6739460]
-
Popov, D, Lee, K. H, Gaponov, I, Ryu, J. H, “Twisted strings-based elbow exoskeleton”, Journal of Korea Robotics Society, (2013), 8(3), p164-172.
[https://doi.org/10.7746/jkros.2013.8.3.164]
-
Gordon, K. E, Sawicki, G. S, Ferris, D. P, “Mechanical performance of artificial pneumatic muscles to power an ankle–foot orthosis”, Journal of Biomechanics, (2006), 39(10), p1832-1841.
[https://doi.org/10.1016/j.jbiomech.2005.05.018]
-
Lee, S. H, Shin, S. Y, Lee, J. W, Kim, C. H, “Design of an 1 DOF assistive knee joint for a gait rehabilitation robot”, Journal of Korea Robotics Society, (2013), 8(1), p008-019.
[https://doi.org/10.7746/jkros.2013.8.1.008]
-
Li, S, Armstrong, C. W, Cipriani, D, “Three-point gait crutch walking: variability in ground reaction force during weight bearing”, Archives of physical Medicine and Rehabilitation, (2001), 82(1), p86-92.
[https://doi.org/10.1053/apmr.2001.16347]
-
Kwon, S. J, “Assistive devices for the disabled in Korea: current statues and policy implications”, Health-welfare Policy Forum, (2006), 4, p42-54.
[https://doi.org/]
-
Sim, G. S, Song, D. H, “Trends on the patent map of crutch technology”, Journal of Korea Intellectual Patent Society, (2005), 7(2), p17-21.
[https://doi.org/]
-
Park, T. J, Jeong, O. C, Yang, S. H, “Study on lower limb moment during axillary crutch gait according to changes in crutch length”, The Korea Journal of Sports Science, (2013), 22(1), p1123-1132.
[https://doi.org/]
-
Bauer, D. M, Finch, D. C, Mcgough, K. P, Benson, C. J, Finstuen, K, Allison, S. C, “A comparative analysis of several crutch-length estimation techniques”, Journal of the American Physical Therapy Association, (1991), 71, p294-300.
[https://doi.org/10.1093/ptj/71.4.294]
-
Kim, J. S, Lim, S. H, Shin, Y. J, “A study on crutched walking frame with one-wheel drive”, Journal of Korean Society of Mechanical Technology, (2013), 15(3), p351-356.
[https://doi.org/10.17958/ksmt.15.3.201306.351]
-
Perry, J, Gait analysis: normal and pathology function, (1992), New Jersey, SLACK.
[https://doi.org/]
-
Cha, K. H, Kang, S. J, Choi, Y. J, “Knee-wearable robot system using EMG signals”, Journal of Control, Robotics, and Systems, (2009), 15(3), p286-292.
[https://doi.org/10.5302/j.icros.2009.15.3.286]
-
Levangie, P. K, Norkin, C. C, Joint structure and function: a comprehensive analysis, (2005), 4th edition, F. A. Davis Company, p373-413.
[https://doi.org/]