우선순위 속도 계획을 통한 조율된 다중 로봇 군집주행

CopyrightⓒKROS
Abstract
Coordinated platooning in unstructured environments requires complex planning to enable multiple robots to form a group. The planner should maintain safe distances between the robots while following a planned global path. Additionally, to efficiently deploy missions involving a leader-follower concept, the planner should schedule the robots to merge onto the desired route based on their priorities, ensuring they form a coordinated, single-file formation without collisions. In this paper, we introduce a prioritized velocity planning that enables coordinated multi-robot platooning. We utilize the Intelligent Driver Model (IDM) as an adaptive cruise control algorithm to maintain safe distances between multiple robots while they follow a desired speed. By leveraging IDM’s features, we design the Prioritized IDM (P-IDM) to employ velocity planning with varying levels of aggressiveness based on each robot’s priority. This allows the multi-robot system to form a coordinated platoon in unstructured scenarios without the need for centralized scheduling. In our experiments, a hierarchical framework incorporating our prioritized velocity planner demonstrates time-efficient and safe platooning in diverse unstructured environment scenarios.
Keywords:
Autonomous Robot, Multi-Robot Systems, Platooning, Mobile Robot1. 서 론
조율된 다중 로봇의 군집주행을 위해서는 복잡한 계획 알고리즘이 필요하다. 군집주행 알고리즘은 다수의 로봇 에이전트가 일렬로 그룹을 형성하면서 서로 안전거리를 유지하고 공통된 전역 경로를 추종할 수 있도록 해야 한다. 또한 다수 로봇들의 임무, 특히 Leader-Follower 체계[1,2]를 갖는 다중 로봇 시스템의 임무를 효율적으로 수행하기 위해서는 계획된 전역 경로로 혼선 없이 순서에 따라 합류하여 조율된 일렬 종대 대형을 형성하도록 해야 한다. 이러한 조율된 군집주행은 우선순위가 높은 Leader 차량이 다른 Follower 차량들을 이끄는 시나리오나, 군집 주행 후 배치 순서가 정의된 다중 로봇 임무 등 주행 순서가 효율성에 중요한 영향을 미치는 다양한 다중 로봇 시나리오에서 활용된다.
로봇들 사이의 안전거리를 유지하기 위해서는 보통 도로 주행 시나리오에서 사용되는 차간거리 유지 알고리즘인 Adaptive Cruise Control (ACC) 알고리즘을 통해 구현할 수 있다[1]. ACC 알고리즘은 차량이 목표 속도를 추종하면서도 선행차량이 존재하는 경우 안전거리를 유지하게 하는 속도 계획 알고리즘을 말한다. 기존의 ACC 알고리즘은 PID 제어 기반 접근법들을 사용한다[3-6]. 이들은 선행 차량과의 상대 거리 및 상대 속도에 따라 목표 속도 추종 및 차간거리 유지 모드를 전환하며 안전거리 유지 및 목표 속도 추종을 구현한다. 그러나 PID 제어 내의 매개변수 (P, I, D)는 차간거리 유지의 관점에서 직관적인 의미를 갖고 있지 않으며, 많은 실험을 통한 튜닝을 요구한다. 몇몇 접근법들은 동일한 경로를 추종하고 있을 때 선행 차량과의 거리 및 속도 에러에 대한 상태 공간 모델을 정의하고 일정한 상대 거리 및 시간을 유지하기 위한 제어 전략을 설계했다[7-10]. 또다른 연구들은 String stability[11,12]를 보장할 수 있는 제어 접근법을 적용하여 외부 외란 및 속도 변화 등에 강인한 차간거리 유지 접근법을 제안한다. 그러나 이러한 제어 관점의 연구들은 군집차량 시스템의 제어 안정성에 집중하며, 비정형 환경에서의 탐사 및 장애물 회피 등 다양한 임무를 수행해야하는 시나리오에서는 유연하게 적용하기 어렵다. 또한, 비정형 환경에서는 분산된 다중 로봇이 공통된 전역 경로를 향해 군집을 형성하고자 할 때 상호 간의 안전거리를 유지하려다 정지하는 상황이 발생할 수 있다. 이러한 문제를 방지하기 위해서는 정형화된 도로 위에서의 군집주행 보다 더 정교하게 설계된 계획 알고리즘이 필요하다.
본 논문에서는 우선순위 속도 계획을 통한 비정형 환경에서의 조율된 다중 로봇 군집주행 전략을 제안한다. 여기서 우선순위는 주행 순서를 의미하며 각 로봇에 대해 사전에 정의되는 것으로 가정한다. 우리는 매개변수화된 운전자 모델인 Intelligent Driver Model (IDM)[13]을 활용하여 주변 다중 로봇 간의 안전거리를 유지하는 ACC 알고리즘을 구현한다. 우리의 IDM 기반 알고리즘은 기존의 제어 게인 기반의 ACC 접근법에 비해 보다 직관적인 특징을 갖는 매개변수를 통해 다양한 주행 특성을 반영한 차간거리 유지를 가능하게 한다. 또한, 각 로봇 별로 정의된 우선순위에 따라 서로 다른 거동 특성을 반영한 차간거리 유지를 수행하고, 이를 통해 우선순위에 따른 군집을 형성하는 조율된 다중 로봇 군집주행 알고리즘을 구성한다. 우리의 군집주행 알고리즘은 주변 로봇들과의 상대적인 우선순위를 비교하여 우선순위가 높고 낮음에 따라 보다 적극적이거나 보수적인 주행 거동을 수행한다([Fig. 1]). 이는 다중 로봇들 사이의 정체 없이 조율된 Leader-Follower 체계의 군집을 형성할 수 있도록 한다. 또한, 하나의 통합된 속도 계획을 통해 조율된 군집주행을 수행하므로 중앙집중식 계획 모듈 없이 각 로봇 별로 분산화된 계획을 가능케 한다.
![[Fig. 1]](/xml/44001/JKROS_2025_v20n1_12_f001.jpg "[Fig. 1]")
Overview of our Prioritized Intelligent Driver Model (P-IDM)-based platooning algorithm. The arrows indicate each robot’s driving characteristics based on its relative priority
우리는 시뮬레이션을 활용하여 다중 로봇이 존재하는 비정형 환경을 구성하여 본 연구의 군집주행 알고리즘을 검증했다. 제안된 우선순위 속도 계획 모듈은 계층적 경로계획 프레임워크[10]에 통합되었으며, 비정형 환경 내의 공통된 전역 경로를 조율된 군집을 형성하여 주행하는 시나리오를 수행했다. 실험 결과, 본 연구에서 제안한 군집주행 알고리즘은 전역 경로를 추종할 때, 로봇 간의 충돌이나 정체 없이 우선순위에 따라 조율된 군집을 형성할 수 있었으며, 다른 비교 모델들보다 더 효율적이고 높은 성능을 보였다. 게다가, 군집 형성 이후 비정형 환경에서의 장애물 회피도 가능했으며, 이는 본 알고리즘의 유연한 로봇 주행 시나리오 적용 능력을 보여준다.
본 연구에서의 주요 기여를 요약하면 다음과 같다:
- ∙ 매개변수화된 운전자 모델 IDM에 기반한 다중 로봇 간의 안전거리 유지 알고리즘을 제안한다.
- ∙ IDM을 활용하여 우선순위에 따라 다양한 주행 특성을 갖는 차간거리 유지를 수행하고 조율된 군집을 형성하게 하는 우선순위 군집주행 알고리즘을 설계한다.
- ∙ 제안하는 알고리즘을 계층적 경로계획 프레임워크에 통합하여 비정형 시나리오에서의 유효성을 검증하고 군집 형성 및 장애물 회피 등의 다양한 주행 시나리오를 수행할 수 있음을 검증한다.
2. 알고리즘
2.1 Intelligent Driver Model 기반 속도 계획
Intelligent Driver Model (IDM)[13]은 도심 환경에서의 교통의 흐름을 시뮬레이션하기 위해 제안된 Car-following 운전자 모델 중 하나이다[1]. 운전자 모델 IDM은 매개변수를 통해 적극적이거나 보수적인 거동 등 다양한 특성을 갖는 가상의 운전자들을 구현할 수 있다. 통상 운전자 모델은 교통의 흐름을 구성하는 차량들의 종방향 주행 시뮬레이션에 사용되는데, 본 연구에서는 이를 로봇 간의 안전거리 유지를 위한 속도 계획 알고리즘, 즉 ACC 알고리즘으로 활용하고자 한다.
IDM은 먼저 Ego 로봇의 현재 속도 vt 및 상대 속도 vrel를 기반으로 아래와 같이 안전 간격 를 연산한다:
| (1) |
여기서 매개변수 sdes는 주변 로봇과의 허용 간격, T는 차두시간(time headway), aaccel와 bdecel는 로봇 허용 가속도 및 감속도를 의미한다. 이후 안전 간격 s*와 현재 대상 로봇과의 간격 s를 활용하여 목표 가속도(atar)를 계산한다:
| (2) |
여기서 vdes는 설정 속도를, δ는 멱지수를 의미한다. 계산된 목표 가속도는 허용 가속도 및 감속도(aaccel, bdecel)를 벗어나지 않도록 클리핑(Clipping)을 적용해 준다. 식 (2)를 보면 목표 가속도는 현재 속도가 낮을 수록 허용 가속도 aaccel에 가깝게, 현재 속도가 설정 속도를 넘어섰을 때는 허용 가속도보다 더 낮게 도출됨을 알 수 있다. 또한 이와 동시에 연산된 안전 간격 s*보다 현재의 간격 s이 더 작을 경우, 음수의 가속도 값이 도출되어 로봇이 감속하도록 한다. 즉, 하나의 수식으로 속도 추종 및 안전거리 유지를 수행하는 ACC 알고리즘을 구현할 수 있으며, 보다 직관적인 매개변수들을 통해 주행 특성을 변화시킬 수 있다. 이는 기존의 모드 스위칭 및 PID 제어 기반 ACC 알고리즘들보다 이점을 갖는다.
목표 가속도와 로봇의 현재 속도 vt, 제어 주기 Δt를 활용하여 아래와 같이 최종 로봇의 목표 속도 vtar를 도출한다:
| (3) |
2.2 우선순위 기반 군집주행 알고리즘
비정형 환경에서의 군집주행은 도로가 있는 정형화된 도심 환경과는 다른 전략을 요구한다. 개방형 환경에서 주변 로봇들이 산발적으로 위치하기 때문에 선행 로봇 한 대가 아닌 모든 로봇과의 안전거리를 유지하기 위한 속도 계획이 필요하다. 또한, 단순한 ACC 알고리즘의 적용 만으로는 군집을 형성할 때 서로 안전거리를 유지하려고 정지하게 되어 정체를 유발할 수 있다. 따라서 다중 로봇이 계획된 전역 경로를 추종하는 군집주행을 위해서는 로봇 사이에 조율된 속도 계획이 필요하다. 본 연구에서는 각 로봇의 우선순위를 비교하고 상황에 따라 다른 거동 특성을 갖는 ACC를 수행하는 군집주행 알고리즘인 Prioritized IDM (P-IDM)을 제안한다. P-IDM은 세 가지의 매개변수 구성에 기반하며, 상대적인 우선순위에 따라 안전거리 유지 시 다른 주행 특성을 갖도록 한다. 매개변수 구성은 [Table 1]과 같다. 첫째로 중립적인 특성을 갖는 Pneut는 중간 크기의 안전거리(sdes), 설정 속도(vdes), 및 감가속도(aaccel, bdecel)가 특징이다. 둘째로 적극적인 주행 특성을 갖는 Paggr는 가장 작은 안전거리, 차두시간(T), 높은 감가속도를 갖는다. 셋째로 보수적인 주행 특성을 갖는 Pcons는 가장 큰 안전거리, 중간 크기의 감가속도를 갖는다. 여기서 설정 속도는 Pcons의 구성이 가장 높은데, 이는 가장 보수적인 주행 특성을 갖는 로봇이 선행 로봇과의 거리를 빠르게 좁히기 위함이다. 각 매개변수 구성은 적용 로봇 플랫폼의 반응성 등을 고려하여 조정이 필요할 수 있다. 본 연구에서는 먼저 중립적인 특성을 갖는 구성 Pneut을 로봇의 적정 속도 및 안전거리를 기반으로 설정하였다. 이후, 앞서 언급한 바와 같이 상대적으로 변형된 매개변수로 구성된 Paggr 및 Pcons를 광범위한 튜닝 과정 없이 정의하였다.

Parameter configurations for the IDM-based algorithm
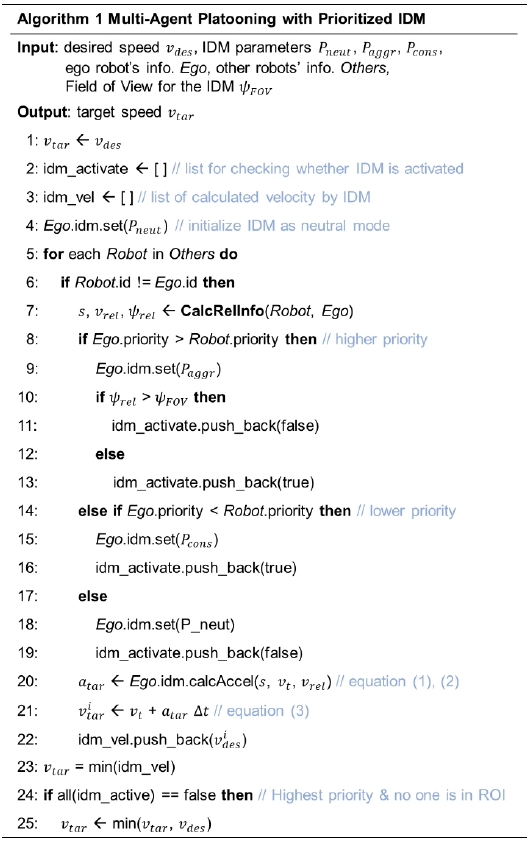
[Algorithm 1]은 [Table 1]의 세 매개변수 구성을 통해 이루어지는 P-IDM의 알고리즘을 나타낸다. P-IDM은 주변 각 로봇과의 상대적인 우선순위를 비교하며, 전반적으로 Ego 로봇이 우선순위가 높은 경우 적극적인 주행 특성을(Aggressive, Paggr), Ego 로봇보다 낮을 경우 보수적인 주행 특성(Conservative, Pcons)을 갖는 IDM을 통해 목표 가속도(atar)를 연산한다. 그리고 이를 식 (3)을 통해 목표 속도로 변환하며 IDM 속도 리스트(idm_vel)에 저장한다. 최종적으로는 가장 낮은 값의 목표 속도를 도출하여 모든 로봇과의 안전거리를 고려한 ACC를 수행한다. P-IDM 알고리즘에서는 Ego 로봇이 상대 로봇보다 우선순위가 높을 경우, 해당 로봇이 시야각(Field of View, FOV) 범위 내에 있는지 여부를 확인한다([Algorithm 1], line 10). 만일 모든 상대 로봇들이 Ego 로봇보다 우선순위가 낮고 FOV 밖에 존재하는 경우, 중립적인 주행 특성(Neutral, Pneut)을 갖도록 설정한다. 이는 [Fig. 1]과 같은 상황에서 발생하는데, 선두 로봇인 Robot I의 경우, 이미 다른 두 로봇보다 우선적으로 전역 경로를 주행 중이므로 더 이상 적극적인 주행 특성을 갖지 않아도 되며, 후행 로봇들과의 거리를 너무 증가시키지 않아야 한다. 따라서 우선순위가 낮은 다른 두 로봇들이 Ego 로봇의 전방 FOV에 있지 않는 경우, 즉 이미 Ego 로봇이 최선두에 위치한 경우에는 중립적인 주행을 하여 군집을 더 효율적으로 이룰 수 있게 한다. 두 번째 로봇 Robot II의 경우, Robot I에 대해서는 보수적인, Robot III에 대해서는 적극적인 특성을 갖는 목표 가속도를 계산하며 결과적으로 Robot I에 대해 보수적으로 계산한 가속도가 적용된다. 세 번째 로봇 Robot III 또한 두 로봇 모두에 대해 우선순위가 낮으므로 보수적인 ACC를 수행하지만, 가까이에 있는 Robot II에 대해 ACC를 적용하게 되므로 멀어지는 Robot I에 대해 ACC를 적용하는 Robot II이 먼저 전역 경로에 합류한 이후에 후행 로봇으로서 주행하게 된다. 결과적으로, 정체 없이 우선순위에 따른 조율된 군집을 형성하고 전역 경로를 추종할 수 있게 한다. Robot II 또는 Robot III이 선두에 위치한 경우에도 우선순위가 더 높은 로봇들이 선두를 향할 때까지 추월하여 주행하게 되고 우선순위가 낮은 로봇들은 보수적인 ACC를 통해 자연스럽게 대기하였다가 합류하는 거동을 수행한다.
Multi-agent platooning algorithm based on P-IDM
2.3 계층적 경로계획 프레임워크와의 통합
본 논문에서 제안한 군집주행 알고리즘은 목표 속도 및 안전거리 유지를 위한 속도 계획을 수행한다. 이는 전역, 지역 경로계획 모듈을 갖는 계층적 경로계획 프레임워크[14]에 속도 계획 모듈로서 통합될 수 있다. [Fig . 2]는 속도 계획 모듈이 구성된 계층적 프레임워크를 보여준다. 경로계획 프레임워크는 전역 지도를 기반으로 전역 경로를 계획하며, 지역 지도를 기반으로 보조 도착점 및 지역 경로계획을 수행한다. 이를 통해 로봇은 전역 경로를 전반적으로 추종하되, 지역 스케일에서 관측되는 장애물을 회피하는 경로계획을 수행할 수 있다. 본 연구에서는 해당 프레임워크에 P-IDM 기반 속도 계획 모듈을 추가하여 다중 로봇의 군집주행을 위한 계층적 경로계획을 수행하도록 한다. 새롭게 통합된 계층적 프레임워크는 다중 로봇의 군집 형성, 전역 경로 추종 및 장애물 회피 등, 비정형 환경 내에서의 다양한 군집주행 시나리오들을 수행할 수 있게 한다. 또한, 속도 계획 모듈에서 개별적으로 우선순위에 기반한 목표 속도를 도출하기 때문에, 중앙집중식 행동 계획 없이 분산화된 군집주행을 가능하게 한다.
![[Fig. 2]](/xml/44001/JKROS_2025_v20n1_12_f002.jpg "[Fig. 2]")
Integration of P-IDM into a hierarchical framework
3. 실험 방법
3.1 시뮬레이션 환경 구성
본 연구에서 제안하는 다중 로봇 군집주행 알고리즘을 효율적으로 실험하기 위해 [Fig. 3]과 같이 시뮬레이션 기반 환경을 구성한다. 시뮬레이션은 GAZEBO[15] 기반 비정형 환경으로 구축하였으며 Robotic Operation System (ROS)[16]를 통해 센서 및 제어 정보를 주고받는 시스템을 구성했다. 해당 환경은 매끄럽지 않은 개방형 지형을 갖고 있으며, 지형의 고도에 기반한 전역 지도를 구성한다. 이는 전역 경로 계획을 수행할 때 사용된다. 로봇은 차동 구동형 로봇인 Husky[17]모델을 기반으로 구성한다. 로봇은 LiDAR 센서(Velodyne 16ch)를 갖추고 있으며 이를 통해 지형 높이 기반 지역 지도를 생성한다. 이는 전역 경로 추종 및 장애물 회피를 위한 실시간 목표점 계획 및 지역 경로 계획에 사용된다. 앞서 언급한 전역, 목표점, 지역 경로계획은 기존 연구[14]에서 제안된 계층적 경로계획 프레임워크의 알고리즘을 활용한다.
![[Fig. 3]](/xml/44001/JKROS_2025_v20n1_12_f003.jpg "[Fig. 3]")
Multi-robot simulated environment using GAZEBO
3.2 시나리오 구성
시나리오는 총 여섯 가지로 구성한다. 모든 시나리오에서는 각 로봇들이 계획된 전역 경로를 추종해야 하고, 군집을 형성할 때 안전거리 유지 및 충돌 회피를 수행해야 한다. Scenario 1은 우선순위가 가장 높은 로봇(Robot I)이 위치한 영역에 전역 경로가 주어지는 시나리오이다. 이는 우선순위가 두 번째(Robot II) 및 세 번째(Robot III)의 로봇이 수렴(Merge)하는 상황을 만드는 시나리오이다. Scenario 2는 전역 경로가 Robot II의 영역에 주어지는 경우이며, Robot I이 Robot II를 추월하고 가장 아래에 있는 Robot III이 전역 경로로 수렴해야 하는 시나리오이다. Scenario 3은 Robot III을 Robot I 및 Robot II가 추월해야 하는 경우이다. 즉, 전역 경로가 어느 로봇의 영역에 가까이 설정되는지에 따라 서로 다른 군집 형성 패턴이 갖도록 시나리오를 구성한다. 시작 및 도착점은 반경 1 m 이내에서 무작위로 지정된다. Scenario 1, 2, 3은 [Fig. 4]에서 확인할 수 있다.
![[Fig. 4]](/xml/44001/JKROS_2025_v20n1_12_f004.jpg "[Fig. 4]")
Overview of the Scenario 1, 2, and 3
추가적으로, Scenario 4, 5, 6를 구성하여 제안하는 알고리즘을 보다 도전적인 조건에서 검증하고자 한다. Scenario 4에서는 6 대의 다중 로봇을 구성하여 주어진 전역 경로를 추종하는 시나리오이다. 이는 제안하는 군집주행의 로봇의 수에 대한 확장성을 검증할 수 있는 조건을 제공한다. Scenario 5는 다수의 장애물이 존재하는 환경에서의 군집주행 시나리오이며, 군집 로봇들의 전역 경로 추종 및 장애물 회피 등 다양한 비정형 주행 상황에서도 안전거리 유지를 수행할 수 있는지 실험하기 위함이다. 마지막으로 Scenario 6에서는 동적 장애물이 존재하는 상황이며, 수동 조정되는 로봇으로 동적 장애물을 구성한다. Scenario 4, 5, 6의 전역 경로는 Scenario 1과 같이 우선순위가 가장 높은 로봇(Robot I)의 영역에 주어지도록 한다.
3.3 기준 모델 및 평가 항목 구성
본 논문에서는 우선순위에 따라 주행 특성을 변화시킴으로써 조율된 군집 형성 및 주행을 구현하고자 한다. 다만, 우선순위에 따라 설정 속도만 변화를 주더라도 앞서 서술한 군집 형성에서의 정체 문제는 해결될 것으로 보일 수 있다. 이를 정량적인 실험을 통해 분석하고 비교하기 위해 다음과 같이 비교 모델을 구성하여 실험한다:
- ∙ IDM-Vel: 동일한 매개변수를 사용하되, 우선순위가 높을 수록 높은 설정 속도를 갖는 IDM 기반 안전거리 유지 및 군집주행 전략.
- ∙ P-IDM: 우선순위에 기반하여 주행 특성을 다르게 적용하는 우선순위 IDM 기반 군집주행 전략.
평가 항목은 세 가지로 구성하며 각 값들의 평균 및 표준 편차를 계산한다. 첫째 Time은 군집을 이루는데 걸리는 시간을 의미한다. 군집은 모든 로봇이 전역 경로와 0.5 m 이내 근접하였을 때 형성된 것으로 판단한다. 둘째 Driven은 세 로봇들이 군집을 이루었을 때까지 소요된 최대 주행 거리를 의미한다. 이는 로봇들이 군집을 이루기까지 필요한 주행 거리를 보여주며, 작은 값일수록 효율적으로 군집을 이루는 것을 나타낸다. 셋째 Gap은 군집 형성시의 세 로봇들의 평균 간격을 의미한다. 간격이 너무 클 경우 비효율적인 군집 형성이 이루어졌음을 의미하며, 간격의 표준편차가 크지 않아야 안정적이고 일관된 간격으로 군집이 형성되었음을 나타낸다.
4. 실험 결과
4.1 군집주행 정량적 성능 평가
[Table 2]는 비교모델 IDM-Vel과 본 연구의 P-IDM 알고리즘의 군집주행 성능 평가 결과를 나타낸다. 실험 결과, Scenario 1, 2, 3에서 P-IDM이 보다 빠른 군집 형성 시간, 낮은 주행 소요 거리, 그리고 안정적인 간격을 유지함을 보여주었다. Scenario 1에서는 가장 우선순위가 높은 Robot I의 영역에 전역 경로가 주어졌으므로 설정 속도만 다르게 한 IDM으로도 자연스럽게 순서대로 전역 경로로 합류하여 안정적인 군집형성을 수행할 수 있었다. 그러나 Scenario 2, 3의 경우, 둘째 또는 셋째 우선순위를 갖는 로봇이 먼저 전역 경로를 추종하게 되므로 Robot I 및 다른 로봇이 보다 적극적으로 전역 경로를 향해 주행해서 합류해야 한다. 이 과정에서 설정 속도만 변화를 준 IDM-Vel의 경우 때때로 동일한 순간에 전역 경로로 합류하게 되고 동일한 주행 특성으로 인해 정체가 발생하였다. 이는 합류 시간(71.8 sec) 및 소요 거리(27.0 m)에 큰 영향을 주었다. 또한, 군집 형성시의 평균 거리 Gap의 표준편차 값(7.6 m)이 큰데, 이는 세 로봇 사이의 군집 간격에 일관성이 떨어짐을 보여준다. 즉, 특정 로봇이 먼저 전역 경로를 추종하면서 군집을 이탈했음을 나타낸다. 반면, 본 연구에서 제안한 P-IDM의 경우, 3.0 m 내외의 평균 간격(3.0, 3.1, 2.9 m)을 보여주었고 상대적으로 작은 표준편차의 Gap 값(0.4, 0.6, 1.2 m)을 갖는다. 이는 P-IDM을 통한 군집주행이 안정적이고 일관적인 간격을 유지하면서 효율적으로 조율된 군집을 형성하는 것을 보여준다.
Quantitative performance evaluation among baseline models
4.2 도전적 조건에서의 군집주행 정량적 성능 평가
우리는 본 논문에서 제안하는 알고리즘에 대해 도전적인 조건에서 추가적으로 성능 평가를 수행했다. 정량적 실험을 위해 두 가지의 군집주행 시나리오를 구성하였다. 첫째는 기존 Scenario 1 세팅에서 로봇들의 초기 위치 또한 랜덤성(±5 m)을 부여한 Scenario 1 (Rand)이다. 이러한 구성은 우선순위가 높은 로봇이 보다 후방에서 시작할 수 있으며, 그 반대의 경우도 발생할 수 있다. 이를 통해 다중 로봇의 다양한 초기 위치에 따른 군집 형성 성능을 검증할 수 있다. 둘째는 기존 구성보다 두 배의 수인 6 대의 로봇으로 구성되는 Scenario 4이다.
[Table 3]는 본 연구의 P-IDM 알고리즘에 대한 Scenario 1 (Rand) 및 Scenario 4에서의 군집주행 성능 평가 결과를 보여준다. Scenario 1 (Rand)에서는 서로 다른 우선순위를 갖는 로봇들이 랜덤하게 초기 배치되므로 기존 Scenario 1에 비해 성능이 소폭 하락하였다. 또한 랜덤성으로 인해 성능의 표준편차가 상승했다. 그러나 군집 형성 시간 및 소요된 거리는 기존 대비 약 3 sec 및 1 m 증가에 그쳤으며 군집 형성시의 평균 간격 Gap의 경우 랜덤한 배치 상황에서도 성능을 유지할 수 있었다. Scenario 4에서는 로봇의 수가 기존 대비 두 배인 6 대로 증가했음에도 본 연구의 알고리즘이 유효하다는 결과를 보여주었다. 로봇의 수가 두 배가 됨으로써 군집 형성 시간은 약 50 sec 증가했지만 군집 형성 거리는 약 6 m 증가에 그쳤다. 또한 안전거리 값의 표준편차가 감소되었는데, 이는 충분한 군집 형성 시간으로 인해 6 대 로봇 사이의 간격이 안정화된 것으로 판단된다. 이러한 결과는 본 연구의 군집주행 알고리즘이 로봇 들의 초기 위치 분포와 상관없이 유효함을 보여주며, 로봇의 수가 증가하더라도 확장성이 있는 알고리즘임을 보여준다.
Quantitative performance evaluation in challenging settings
4.3 군집주행 궤적 분석
[Fig. 5]는 Scenario 1, 2, 3, 4, 5, 6에서의 군집형성 및 주행시의 궤적을 보여준다. Scenario 1에서는 Robot I이 먼저 전역 경로를 주행하고 이를 Robot II, III가 따라오는 궤적을 보여준다. 이때, Robot II 및 Robot III가 거의 동일한 순간에 전역 경로를 합류하였는데, Robot II가 먼저 전역 경로에 수렴하고 이후에 Robot III가 따라오는 조율된 군집형성을 보여주었다. Scenario 2는 Robot II의 영역에 전역 경로가 주어졌으므로 Robot I이 Aggressive한 주행 특성으로 Robot II를 추월하여 전역 경로에 합류하였다. Robot III는 아래쪽에서부터 전역 경로를 향해 추종하였는데, Robot I은 최선두를 달성하였기에 Neutral한 주행 특성을, Robot II는 Robot I에 대한 안전거리 유지를 수행함으로써 Robot III와의 간격을 크게 벌리지 않으면서 군집주행을 수행했다. 결과적으로 뒤늦게 합류한 Robot III와의 안정된 거리를 유지하면서 군집형성에 성공하였다. Scenario 3는 가장 복잡한 군집형성을 보여준다. Robot I, II는 전역 경로를 주행하고 있는 Robot III를 차례대로 추월하여 합류하였다. 먼저 x 좌표 -195 m 지점에서 Robot I이 Robot III을 먼저 추월에 성공하였고, x 좌표 -188 m 지점에서 Robot II가 Robot III를 추월하여 조율된 군집을 이루었다. 각각의 추월 시 Robot III이 Robot I 및 Robot III 보다 Conservative한 안전거리유지를 수행했고 결과적으로 각 로봇을 양보하는 거동을 보여주었다. 이를 통해 세 로봇은 정체 없이 우선순위에 맞는 조율된 군집을 형성하여 전역 경로를 추종할 수 있었다. Scenario 4에서는 각 Robot I, II, III 후방에 Robot IV, V, VI가 존재했고, Scenario 1과 같이 Robot I의 영역에 전역 경로가 주어졌으므로 Robot I 및 IV가 가장 먼저 경로에 도달하였다. 이때 Robot II, III 및 V, VI의 경우, 전역 경로를 향해 수렴하는 양상을 보였다. 가장 선두에서 주행하는 Robot I을 제외한 5 대의 로봇이 서로 상호작용하는 상황이었으나 정체없이 우선순위 즉, 주행 순서에 맞게 하나의 군집으로 합류할 수 있었다.
![[Fig. 5]](/xml/44001/JKROS_2025_v20n1_12_f005.jpg "[Fig. 5]")
Results in diverse multi-robot scenarios. Scenario 1, 2, and 3 show the platooning results with three mobile robots. Scenario 4 illustrates the results with an extended multi-agent system consisting of a total of six robots. Scenario 5 and 6 show the resultant trajectories in unstructured environments with multiple obstacles or a dynamic obstacle that is manually controlled by a human
4.4 군집 로봇의 장애물 회피 분석
다수 장애물이 존재하는 Scenario 5에서는 안정적인 합류를 통해 군집을 형성하고 안전거리를 유지하면서 성공적으로 장애물을 회피할 수 있었다([Fig. 5]). 초기 t1의 순간에는 Robot I이 전역 경로를 점유하고 있는 장애물을 회피하고 있었으며 이때 Robot II와 Robot III이 군집을 형성하는 도중의 모습을 보여준다. 이러한 미묘한 상황에서도 t2 시점의 결과와 같이 군집을 온전히 형성하면서 장애물을 회피할 수 있었다. 이후 t3 시점과 같은 연속적인 장애물 상황에서 선두 로봇들이 회피로 인해 속도가 줄어들었음에도 후행 로봇들이 안전거리를 유지하면서 군집 대열을 형성하는 것을 확인할 수 있었다. 이후 장애물 구간을 빠져나간 후 군집을 지속적으로 형성하면서 전역 경로를 추종할 수 있었다 (t4). Scenario 6는 동적 장애물 역할을 맡은 로봇이 존재하는 상황이며, 군집 대열의 경로를 간섭하는 경로로 장애물 로봇이 진입하는 시나리오이다. 가정 선두를 맡은 Robot I이 해당 동적 장애물을 성공적으로 회피하였으며, Robot I을 뒤따르고 있던 Robot II 및 Robot III 또한 각자의 경로계획 프로세스를 통해 장애물 로봇을 회피하고 다시 군집을 형성할 수 있었다. 이러한 결과는 본 연구에서 제안하는 군집주행 알고리즘 P-IDM이 계층적 경로계획 프레임워크에 통합되어 하나의 통일된 알고리즘으로 합류(Merge), 군집주행(Platooning), 그리고 장애물 회피 등 다양한 다중 로봇 임무를 수행할 수 있음을 보여준다.
5. 결 론
본 논문에서는 비정형 환경에서의 군집주행을 위한 우선순위 기반 속도 계획 알고리즘인 P-IDM을 제안하였다. P-IDM은 직관적인 의미를 갖는 매개변수로 구성되어 다양한 주행 특성을 구현할 수 있는 IDM에 기반한 군집주행 알고리즘이며, 우선순위에 따라 보다 적극적이거나 보수적인 ACC를 수행할 수 있다. P-IDM은 전역, 보조도착점 및 지역 경로계획 모듈이 구성된 계층적 프레임워크에 통합되었고 다양한 비정형 시나리오 내에서 검증되었다. 실험 결과, P-IDM 기반 프레임워크는 다중 로봇이 공통된 전역 경로로 합류할 때 정체없이 조율된 군집을 형성할 수 있게 하였고 군집주행 및 장애물 회피 등 다중 로봇 시스템의 다양한 임무를 수행할 수 있음을 보여주었다. 추후 연구에서는 본 연구의 결과를 확장하여 실 환경에서 본 알고리즘을 검증하는 것을 목표로 한다.
Acknowledgments
This work was supported by the Defense Rapid Acquisition Technology Research Institute, funded by the Defense Acquisition Program Administration (DAPA) in 2023 (UC200017D).
References
-
D. Gu and Z. Wang, “Leader–Follower Flocking: Algorithms and Experiments,” IEEE Transactions on Control Systems Technology, vol. 17, no. 5, pp. 1211-1219, Sept., 2009.
[https://doi.org/10.1109/TCST.2008.2009461]

-
A. Loria, J. Dasdemir, and N. Alvarez Jarquin, “Leader–follower formation and tracking control of mobile robots along straight paths,” IEEE Transactions on Control Systems Technology, vol. 24, no. 2, pp. 727-732, Mar., 2015.
[https://doi.org/10.1109/TCST.2015.2437328]
-
C. Lu, J. Gong, C. Lv, X. Chen, D. Cao, and Y. Chen, “A personalized behavior learning system for human-like longitudinal speed control of autonomous vehicles,” Sensors, vol. 19, no. 17, Aug., 2019.
[https://doi.org/10.3390/s19173672]
-
P. Shakouri, A. Ordys, D. S. Laila, and M. Askari, “Adaptive cruise control system: comparing gain-scheduling PI and LQ controllers,” IFAC Proceedings, vol. 44, no. 1, pp. 12964-12969, Jan., 2011.
[https://doi.org/10.3182/20110828-6-IT-1002.02250]
-
Y. S. Dawood, A. Mahmood, and M. A. Ibrahim, “Comparison of PID, GA and fuzzy logic controllers for cruise control system,” International Journal of Computing and Digital Systems, vol. 7, no. 5, pp. 311- 319, 2018.
[https://doi.org/10.12785/ijcds/070505]
-
A. Turan, “PID controller design with a new method based on proportional gain for cruise control system,” Journal of Radiation Research and Applied Sciences, vol. 17, no. 1, Mar., 2024.
[https://doi.org/10.1016/j.jrras.2023.100810]
-
V. A. Knights, Z. Gacovski, S. Deskovski, and O. Petrovska, “Guidance and control system for platoon of autonomous mobile robots,” Journal of Electrical Engineering, vol. 6, pp. 281- 288, 2018.
[https://doi.org/10.17265/2328-2223/2018.05.005]
-
M. Velasco-Villa, R. D. Cruz-Morales, A. Rodriguez-Angeles, and C.A. Domínguez-Ortega, “Observer-based time-variant spacing policy for a platoon of non-holonomic mobile robots,” Sensors, vol. 21, no. 11, pp. 3824, 2021.
[https://doi.org/10.3390/s21113824]
-
M. P. Manuel, M. Faied, M. Krishnan, and M. Paulik, “Robot platooning strategy for search and rescue operations,” Intelligent Service Robotics, vol. 15, no. 1, pp. 57-68, 2022.
[https://doi.org/10.1007/s11370-021-00390-7]
-
C. P. Bechlioulis, P. Vlantis, and K. J. Kyriakopoulos, “Coordination of multiple robotic vehicles in obstacle-cluttered environments,” Robotics, vol. 10, no. 2, May, 2021.
[https://doi.org/10.3390/robotics10020075]
-
G. Klančar, D. Matko, and S. Blažič, “A control strategy for platoons of differential drive wheeled mobile robot,” Robotics and Autonomous Systems, vol. 59, no. 2, pp. 57-64, Feb., 2011.
[https://doi.org/10.1016/j.robot.2010.12.002]
-
X.-G. Guo, J.-L. Wang, F. Liao, and R. S. H. Teo, “String stability of heterogeneous leader-following vehicle platoons based on constant spacing policy,” 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, pp. 761-766, 2016.
[https://doi.org/10.1109/IVS.2016.7535473]
-
M. Treiber, A. Hennecke, and D. Helbing, “Congested traffic states in empirical observations and microscopic simulations,” Physical review E, vol. 62, no. 2, Aug., 2000.
[https://doi.org/10.1103/PhysRevE.62.1805]
-
H.-K. Seong, S.-W. Moon, D. H. Shim, W.-Y. Kim, and T.-G. Lee, “A Subgoal-based Hierarchical Path Planning Framework for a Mobile Robot in Unstructured Environments,” Journal of Institute of Control, Robotics and Systems, vol. 29, no. 6, pp. 527-536, 2023.
[https://doi.org/10.5302/J.ICROS.2023.22.0228]
-
N. Koenig and A. Howard, “Design and use paradigms for gazebo, an open-source multi-robot simulator” 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, vol. 3, pp. 2149-2154, 2004.
[https://doi.org/10.1109/IROS.2004.1389727]
- M. Quigley, B. Gerkey, K. Conley, J. Faust, T. Foote, J. Leibs, E. Berger, R. Wheeler, and A. Ng, “ROS: an open-source Robot Operating System,” ICRA workshop on open source software, vol. 3, no. 3.2, 2009, [Online], http://lars.mec.ua.pt/public/LAR%20Projects/BinPicking/2016_RodrigoSalgueiro/LIB/ROS/icraoss09-ROS.pdf, .
- Husky A300, 2020, [Online], https://clearpathrobotics.com/husky-unmanned-ground-vehicle-robot/, , Accessed: Aug. 23, 2024.

2019 인하대학교 기계공학과(공학사)
2021 한국과학기술원 로봇공학학제(공학석사)
2021~현재 한국과학기술원 전기및전자공학부 박사과정
관심분야: Autonomous driving, Motion planning

2022 경북대학교 전자공학(공학사)
2024 한국과학기술원 전기및전자공학부(공학석사)
2024~현재 한국과학기술원 전기및전자공학부 박사과정
관심분야: Autonomous vehicle, Path planning

1991 서울대학교 기계설계학과(공학사)
1993 서울대학교 기계공학과(공학석사)
2000 University of California, Berkeley, Mechanical Engineering(공학박사)
2018 한국과학기술원 항공우주공학과(부교수)
2018~현재 한국과학기술원 전기및전자공학부 정교수
관심분야: Unmanned system, Autonomous driving

1994 고려대학교 기계공학과(공학사)
1996 고려대학교 기계공학과(공학석사)
2011 현대자동차 주임연구원
2011~현재 한화에어로스페이스 유무인복합연구센터 수석연구원
관심분야: Manned-Unmanned Teaming, Unmanned Ground Vehicle

2017 고려대학교 제어계측공학과(공학사)
2023 국민대학교 자동차IT융합전공(공학박사)
2023~현재 한화에어로스페이스 유무인복합연구센터 선임연구원
관심분야: System Engineering, Autonomous Vehicle