인간-로봇 협업 공정의 안전성 실증을 위한 테스트베드 개발

CopyrightⓒKROS
Abstract
Human-robot collaboration has become widespread in industrial environments to improve flexibility and productivity. However, ensuring the safety of human operators in collaborative workspaces remains a critical requirement for the broader adoption of human-robot collaboration. This paper presents the development of a testbed designed to validate the safety of human-robot collaboration processes. The testbed integrates modular task environments, data acquisition, and PFL (Power and Force Limiting) performance evaluation to simulate realistic collaborative scenarios. The design prioritizes compatibility with diverse robotic platforms and adaptability to various industrial workflows based on OPC UA (Open Platform Communications Unified Architecture). Through experiments involving collaborative processes between humans and robots, we evaluated safety performance using quantitative metrics in accordance with force or pressure thresholds based on ISO/TS 15066. The results demonstrate the testbed’s effectiveness in identifying safety risks and providing a platform for validation of human-robot collaboration applications.
Keywords:
Human-Robot Collaboration, Safety Validation, Testbed, PFL (Power and Force Limiting), Risk Assessment1. 서 론
최근 산업 현장에서는 유연한 생산 시스템과 고도화된 작업 협업을 구현하기 위해 인간-로봇 협업 기술이 활발히 도입되고 있다. 협업 공정은 기존 산업용 로봇과 달리 작업자와 동일한 공간을 공유하며 상호작용할 수 있도록 설계되어, 작업 유연성 증대, 공간 효율 향상, 노동 강도 완화 등 다양한 이점을 제공한다. 특히 다품종 소량생산 및 비정형 작업 환경이 증가하면서 인간-로봇 협업 기술은 점차 필수적인 기술로 인식되고 있다[1].
그러나 이러한 인간-로봇 협업 시스템의 광범위한 산업 적용을 위해서는 무엇보다도 작업자 안전성 확보가 선행되어야 한다[2]. 기존의 물리적 차단 장치에 의존한 안전 설계는 인간-로봇 협업 기술 특유의 개방형 상호작용 구조와 잘 부합하지 않는다. 이에 따라, 개방형 상호작용 구조 환경에서 작업 중 발생하는 위험성을 평가할 수 있는 실증 기반 검증 시스템, 즉 테스트베드 개발의 필요성이 제기된다.
ISO/TS 15066에서는 협업 로봇 시스템의 안전성을 보장하기 위한 주요 기능으로 동력-힘 제한, 속도 및 위치 감시 등의 운용 모드를 정의하고 있으며, 이들 기능은 협업 공정에서의 필수 안전 기능으로 간주된다[3]. 현재 협동로봇 활용을 위한 위험성 평가 방법 개발[4], 작업안전 시나리오 설계 방법론 연구[5]나 속도 및 위치 감시 기능에 대한 미국 NIST 평가 환경 개발 사례[6]는 ‘[Fig. 1]’과 같이 존재하지만, 동력-힘 제한 기능을 포함하여 제조 환경 내 다양한 조건을 실제 혹은 유사한 산업 환경에서 복합적으로 평가할 수 있는 테스트베드는 국내외를 통틀어 아직 충분히 연구된 바가 없다.
![[Fig. 1]](/xml/46109/JKROS_2025_v20n3_408_f001.jpg "[Fig. 1]")
Example of speed and separation monitoring testbed[6]
이에 본 연구에서는 인간-로봇 협업 공정의 안전성을 실증적으로 검증할 수 있는 테스트베드를 개발하였다. 제안된 테스트베드는 다양한 작업 조건을 유연하게 구성할 수 있는 모듈형 작업 환경, 로봇 동작 시 발생하는 데이터를 수집할 수 있는 데이터 축적 기능, 동력-힘 제한 성능을 정량적으로 평가할 수 있는 기능을 통합하여, 실제 협업 시나리오 기반으로 평가될 수 있도록 설계되었다. 또한, 테스트베드 통신은 OPC UA (Open Platform Communications Unified Architecture) 기반으로 구현하여, 이기종 로봇 및 센서 시스템 간의 호환성과 적용 확장성을 고려하였다.
구현된 테스트베드는 ISO/TS 15066[3]에서 제시한 힘 및 압력 기준에 따른 정량 지표를 기반으로 인간-로봇 협업 상황에서의 안전성 평가 실험에 활용되었으며, 협업 공정 내 위험요소를 효과적으로 식별하고 검증할 수 있는 플랫폼으로서의 유효성을 실증하였다.
2. 테스트베드 구현 및 시험
2.1 테스트베드 개념 및 요구사항
본 연구에서 구현하고자 하는 ‘5세대 통신망 첨단 제조 실증환경 테스트베드’는 5세대 무선통신 기술을 기반으로 한 첨단제조로봇을 활용하여, 다품종 유연 생산 공정을 모사한 실증 시스템이다. 이 테스트베드는 단순 로봇 성능만을 확인하는 실험실 수준의 환경이 아니라, 실제 산업 환경과 유사한 공정 흐름과 조건을 제공하여, 작업자와의 충돌, 설비 오작동 등 로봇 기술이 현장에 적용되었을 때 발생할 수 있는 다양한 요소들을 통합적으로 고려할 수 있는 복합 실험 환경이다.
특히 본 테스트베드는 소형 전기자동차 클러스터, 반려동물 돌봄로봇, 블루투스 스피커를 생산하는 다품종 제조 시나리오를 기반으로 공정을 구성하고자 하였다. 이들은 각각 자동차 산업, 로봇 산업, 가전 산업을 대표하는 제품군으로, 실제 제조업에서 요구되는 다양한 조립·검사·물류 공정 요건을 포괄적으로 반영하고자 하였다.
이렇게 정의된 테스트베드를 구현하기 위해 ‘[Table 1]’과 같이 요구사항을 정리하였다.

Requirements of the testbed
2.2 테스트베드 설계 및 구현
앞서 정의한 테스트베드의 개념과 요구사항을 기반으로 테스트베드를 설계를 진행하였다. 개별 공정의 기본 프레임은 여러 공정을 모사할 때 호환성을 높이기 위하여 높이가 750 mm인 모듈형으로 설계되었다. 로봇 및 기타 설비의 자유도 높은 설치를 위해 설치 면에 서비스 탭과 알루미늄 프로파일을 반영하였다. 프레임 내에는 로봇과 연동될 수 있는 PLC (Programmable Logic Controller), 5세대 무선통신 라우터, 속도 및 위치 감시 실증용 레이저 스캐너 등 전장 설비들이 사전에 탑재되도록 설계하였으며, 설계 예시는 다음 ‘[Fig. 2]’와 같다.
![[Fig. 2]](/xml/46109/JKROS_2025_v20n3_408_f002.jpg "[Fig. 2]")
Example of modular basic frame configuration: aluminum frame, programmable logic controller, 5th generation router and laser scanner
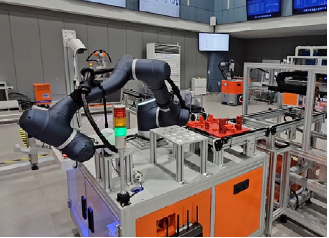
이 모듈형 기본 프레임을 기반으로 하여 요구사항에서 기술된 모사 공정들이 이어서 설계되었다. 동력-힘 제한, 속도 및 위치 감시 등의 안전 기능이 탑재되어 실증될 수 있도록 설계되었기에, 해당 기능이 있는 영역에는 별도의 안전 펜스가 설계되지는 않았다. 다음 ‘[Fig. 3]’은 인간-로봇 협업 포장 공정 설계 결과 예시이다.
![[Fig. 3]](/xml/46109/JKROS_2025_v20n3_408_f003.jpg "[Fig. 3]")
Example of human-robot collaboration packaging process
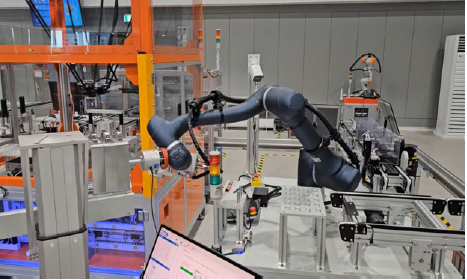
이어서 제조 환경 내 개별 공정들이 연계되어 복수의 조립·검사·포장 등의 공정에 대한 실증이 필요한 경우를 위하여 공정들을 연결해주는 지능형 물류 시스템을 설계하여 반영하였다. 이를 통해 작업자 혹은 로봇의 접근에 따른 인간-로봇간 물리적 접촉 등 공정 간 이송 중 발생할 수 있는 다양한 안전 위험성에 대한 실증을 할 수 있는 기능을 반영하였다. ‘[Fig. 4]’는 개별 공정들과 지능형 물류 시스템을 포함한 전체 시스템의 설계 결과이다.
![[Fig. 4]](/xml/46109/JKROS_2025_v20n3_408_f004.jpg "[Fig. 4]")
Design result of 5th generation advanced manufacturing substantiation testbed
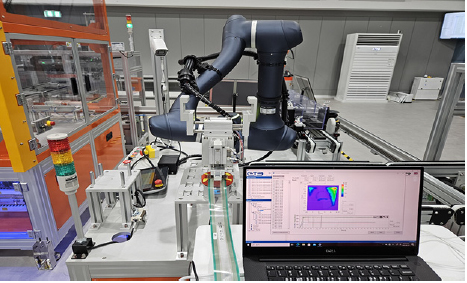
테스트베드에서 생성된 로봇 데이터의 경우 Modbus와 같이 OPC UA (Open Platform Communications Unified Architecture)와 호환되는 통신 프로토콜을 사용하여 상위 시스템인 ‘5세대 통신망 실증환경 통합관제시스템’에 5세대 무선통신으로 전송되도록 소프트웨어와 네트워크를 설계하였다. 로봇 외 나머지 설비에서 생성되는 데이터의 경우 OPC UA (Open Platform Communications Unified Architecture)와 호환되는 PLC (Programmable Logic Controller) 드라이버를 가진 PLC (Programmable Logic Controller)를 거쳐 상위 시스템에 전달되도록 설계하였다. 전달된 데이터는 상위 시스템에 축적되고, 사용자가 원할 때 조회 및 분석 가능하도록 설계하였다. ‘[Fig. 5]’는 이와 같은 설계 과정을 거쳐 제작된 테스트베드의 구현 결과이다.
![[Fig. 5]](/xml/46109/JKROS_2025_v20n3_408_f005.jpg "[Fig. 5]")
Implementation result of 5th generation advanced manufacturing substantiation testbed
2.3 테스트베드 활용 안전성 실증
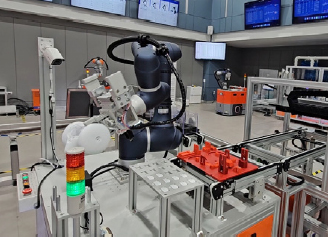
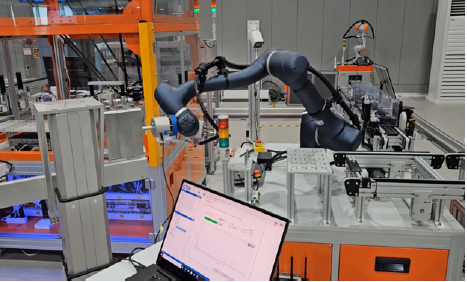
테스트베드를 구현한 후, 시스템의 활용성을 확인하기 위해 인간-로봇 협업이 있는 반려동물 돌봄로봇 포장 공정을 대상으로 선정하여 안전성 실증을 진행하였다. 해당 공정은 ‘[Fig. 6]’과 같이 작업자가 반려동물 돌봄로봇의 부품을 공정 내 지그에 배치하는 작업과 동력-힘 제한 기능이 있는 머니퓰레이터가 이 부품을 반려동물 돌봄로봇에 조립하여 포장하는 과정으로 구성되어 있다.
![[Fig. 6]](/xml/46109/JKROS_2025_v20n3_408_f006.jpg "[Fig. 6]")
Packaging process for pet care robots with human-robot collaboration
안전성 실증을 위한 첫 번째 단계로 해당 공정에 대하여 ISO 12100[7]에 따른 위험성 평가를 진행하였다. 위험성 평가 과정 중 위험성 추정의 경우 ‘[Table 2]’와 같이 ISO/TR 14121-2[8]에 제시된 위험성 추정표 예시를 활용하여 진행하였다. 상해 심각도(Severity of harm)는 표준에 제시된 예시에 따라 다음과 같이 정의된다.
Risk estimation matrix[8]
- ㆍ catastrophic – 사망/영구 장애를 초래하는 부상/질병
- ㆍ serious – 심각한 쇠약성 부상 또는 질병
- ㆍ moderate – 응급처치 이상이 필요한 상당한 부상/질병
- ㆍ minor – 부상 없음 또는 응급 처치만 필요한 가벼운 부상
‘[Table 3]’은 위험성 추정 결과 중 동력-힘 제한 기능을 가진 머니퓰레이터에 대한 결과를 보여준다. 2번의 경우 머니퓰레이터가 동작에 따라 작업자와 물리적 접촉(충격) 가능성이 있는 2가지를 보여준다. 로봇이 사람과의 협업 공간에서 가까이 접근하여 동작하는 경우 상해 발생 가능성을 Unlikely로 추정하였고, 멀리 떨어진 곳에서 동작을 하는 경우 Remote로 추정하였다. 다만, 상해 심각도는 로봇 관련 안전 기능이 작동하고, 말단장치가 날카롭지 않고 로봇 무게가 일반 산업용 로봇 대비 가벼운 점을 고려한 정성적 판단만 가능하기에, 각각의 경우에 대해 Moderate와 Minor의 2가지 경우로 추정하였다.
Initial risk estimation result
다음으로 물리적 접촉(충격)과 같이 위험성 추정 결과가 여러 결과로 나뉠 수 있는 경우를 조금 더 객관적으로 검증하기 위하여 테스트베드를 활용한 실증을 진행하였다. 머니퓰레이터에서 생성된 관절별 각도, TCP (Tool Center Point)의 축별 위치 및 회전 각도, TCP (Tool Center Point) 속도 등의 데이터가 5세대 무선통신을 통하여 상위시스템에 축적되었으며, 데이터를 분석한 결과는 ‘[Fig. 7]’과 같다. 데이터 분석 결과 TCP (Tool Center Point) 속도가 가장 빠른 머니퓰레이터 자세가 가장 작업자와 물리적 접촉(충격)을 할 확률도 높은 것으로 나타났다. 이 분석 결과를 반영하여 수정한 위험성 추정 결과는 ‘[Table 4]’와 같다.
![[Fig. 7]](/xml/46109/JKROS_2025_v20n3_408_f007.jpg "[Fig. 7]")
Manipulator joint angles, tool center point position, orientation angles, and tool center point speed data acquired in the upper-level system via 5th generation wireless communication
Revised risk estimation result after data analysis
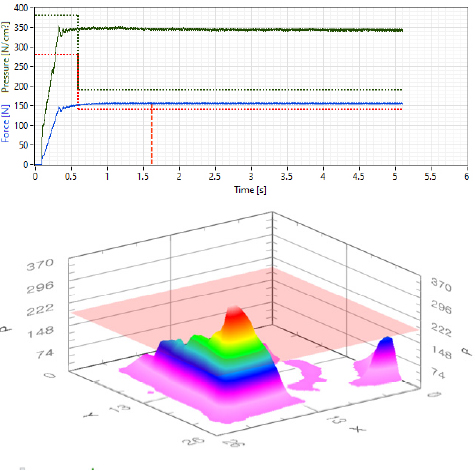
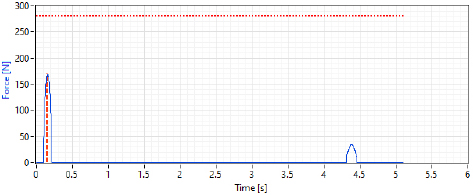
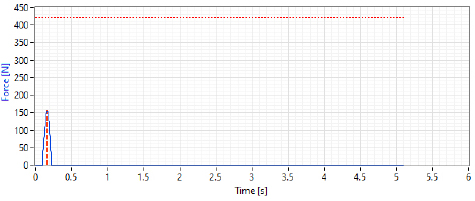
이어서 일정 수준 위험성이 있는 것으로 추정된 ‘[Table 4]’의 1번과 2번 상황에 대하여 위험성 감소 조치 적용이 필요한지를 정량적으로 판단하기 위해 KOROS 1141[9]에 따라 상황별 접촉 시 발생하는 힘과 압력을 ‘[Table 5]’와 같이 측정하였다.
Measurement of forces and pressures in human-robot contacts based on the standard[9]
물리적 접촉(충격)의 경우, 말단장치가 아닌 머니퓰레이터 관절부와의 접촉이기에 압력은 제외하고 힘 측정만 진행하였다. 모사된 신체 부위당 3회 측정을 진행하였다. ‘[Table 6]’은 모사된 신체 부위별 측정 결과 예시를 보여준다.
Measurement result example of forces and pressures in human-robot contacts based on the standard[9]
측정 결과를 활용하여 안전성을 판정하기 위해서는 측정 결과와 생체역학적 한계를 비교하는 작업이 필요하다. 이를 위해 회차별 측정된 준정적·동적 상태에서의 힘과 압력의 최댓값을 구한 후, 모사된 신체 부위별 최댓값들의 평균값을 계산하였다. ‘[Table 7]’은 이 평균값들을 ISO/TS 15066에 있는 생체역학적 한계와 비교하여 해당 상황의 안전 여부를 판정한 결과를 보여주며, 표에 있는 세부 신체 부위별 번호는 ISO/TS 15066 Table A.2 – Biomechanical limits 내 Specific body area의 번호 및 세부 신체 부위와 일치한다[3].
Safety validation result based on the standard[3]
3. 결 론
본 논문에서는 인간-로봇 협업 공정의 안전성을 정량적으로 실증할 수 있는 테스트베드를 설계·구현하고, 이를 활용한 실험을 통해 안전성 평가 결과를 도출하였다. 제안된 테스트베드는 5세대 무선 통신 환경과 Open Platform Communications Unified Architecture (OPC UA) 기반의 통합 데이터 취득 구조를 기반으로, 산업 현장에서 발생 가능한 다양한 협업 공정을 실제와 유사한 조건에서 재현할 수 있도록 구성되었다. 또한 협업 공정의 주요 안전 기능인 동력-힘 제한, 속도 및 위치 감시 등을 실험 가능한 형태로 통합하여, 국제 표준 기반의 안전성 검증이 가능한 실증 시스템을 구현하였다.
또한 단일 공정 내에서는 PLC (Programmable Logic Controller) 유선 통신으로 데이터를 송수신하여, 5세대 무선 통신에 문제가 생기더라도 안전성에 영향을 미치지 않아 무선 통신은 실증 대상으로 고려하지 않았다. 다만 무선 통신 문제 발생 시 전/후 공정과 연동이 되지 않거나 MES (Manufacturing Execution System)와 같은 상위 시스템의 데이터 수집에 문제가 발생할 수 있어 실증 후 데이터를 확인하였다. 무선 통신을 통해 수집된 데이터 확인 결과 누락과 같은 문제가 없음을 확인하였다. 이에 따른 주요 결론은 다음과 같다.
첫째, 테스트베드는 실제 산업 환경을 대표하는 다품종 제조 시나리오(전기차 클러스터, 반려동물 돌봄로봇, 블루투스 스피커 생산 공정)를 기반으로 설계되었다. 각 공정은 모듈형 프레임 구조로 구성되어 있으며, 다양한 이기종 로봇(머니퓰레이터, 이동 로봇 등)의 설치와 변경이 용이하도록 설계되었다. 이를 통해 사용자는 공정 전환 및 레이아웃 변경이 자유로운 유연 제조 환경을 구현할 수 있으며, 설비 간 통신은 Open Platform Communications Unified Architecture (OPC UA) 기반 네트워크와 5세대 무선망을 통해 실시간 연동된다.
둘째, 구현된 테스트베드를 활용하여 실제 작업자가 참여하는 반려동물 돌봄로봇 포장 공정 시나리오를 선정하고, ISO 12100[7]에 따라 위험성 평가를 수행하였다. 초기 위험성 추정 결과에 따르면 물리적 접촉 시 중~저수준의 위험성이 도출되었으며, 이를 추가 검증하기 위해 로봇의 관절각, TCP (Tool Center Point) 위치 및 속도 데이터를 수집·분석하였다. 이를 통해 위험성 평가를 정량적 데이터 분석과 연계하여 진행했다.
셋째, KOROS 1141[9]에 따라 손·가슴·등 부위에 대한 접촉 시 힘 및 압력을 측정하고, 이를 ISO/TS 15066의 생체역학적 허용값[3]과 비교하였다. 그 결과, 대부분의 동적 접촉 상황에서는 기준을 만족하였으나, 준정적 접촉의 경우 손과 손가락 부위에서 기준을 초과하는 결과가 도출되었다. 따라서 손과 손가락에 대한 일부 준정적 접촉 상황에서는 안전 기준을 초과하여 추가적인 위험성 감소 조치가 필요함을 확인하였다. 이를 통해 테스트베드를 활용하여 위험성 추정 과정에서 정성적으로 결정했던 위해 중대성의 정량적 확인 및 인간-로봇 협업 공정에 대한 정량적 안전성 실증이 가능함을 확인하였다.
향후 본 테스트베드는 안전성 실증을 기반으로 하여 위험성 감소 조치 유효성 검증 등의 후속 연구에 활용될 예정이다. 이러한 실증 인프라 활용 연구는 실제 산업 현장에 적용 가능한 인간-로봇 협업 시스템의 안전성과 신뢰성을 확보하기 위한 기반 기술로 활용될 수 있을 것으로 기대된다.
Acknowledgments
This work was supported by Robot Industry Technology Development Program (P0014166) funded by the KIAT and 2025 Intelligent Robot Distribution and Expansion Project by the MOTIE of Korea.
References
-
V. De Simone, V. Di Pasquale, V. Giubileo, and S. Miranda, “Human-robot collaboration: an analysis of worker’s performance,” ELSEVIER, vol. 200, pp. 1540-1549.
[https://doi.org/10.1016/j.procs.2022.01.355]

-
J. Arents, V. Abolins, J. Judvaitis, O. Vismanis, A. Oraby, and K. Ozols, “Human-robot collaboration trends and safety aspects: a systematic review,” Journal of Sensor and Actuator Networks, vol. 10, no. 3, 2021.
[https://doi.org/10.3390/jsan10030048]
- ISO, Robots and robotic devices — collaborative robots, ISO/TS 15066:2016, Feb., 2016, [Online], https://www.iso.org/standard/62996.html, .
-
J. Jun, J. Ryu, K. Kim, and H. Kim, “Development of risk assessment method for cobot workplace and regulation response,” Journal of Korea Robotics Society, vol. 14, no. 4, pp. 333-339, Nov., 2019.
[https://doi.org/10.7746/jkros.2019.14.4.333]
-
Y.-H. Kim and J.-O. Kim, “A design methodology of task safety scenario for the application of collaborative robots,” Journal of Korea Robotics Society, vol. 15, no. 3, pp. 256-268, Aug., 2020.
[https://doi.org/10.7746/jkros.2020.15.3.256]
-
S. Szabo and W. Shackleford, A testbed for evaluation of speed and separation monitoring in a human robot collaborative environment, NISTIR 7851, Mar. 2012, [Online], https://tsapps.nist.gov/publication/get_pdf.cfm?pub_id=910293, .
[https://doi.org/10.6028/NIST.IR.7851]
- ISO, Safety of machinery – general principles for design – risk assessment and risk reduction, ISO 12100:2010, Nov., 2010, [Online], https://www.iso.org/standard/51528.html, .
- ISO, Safety of machinery – risk assessment – Part 2: practical guidance and examples of methods, ISO/TR 14121-2:2012, Jun., 2012, [Online], https://www.iso.org/standard/57180.html, .
- KOROS, Measurement and evaluation method for quasi-static and transient contact physical quantities of robots, KOROS 1141, Mar. 8, 2019, [Online], http://www.koros.or.kr/bbs/board.php?bo_table=notice27&wr_id=143&sfl=wr_subject&sop=and, .

2016 울산과학기술원 기계및신소재공학부(학사)
2016~2019 현대자동차 사원
2019~2021 한국쓰리엠 선임연구원
2021~현재 한국로봇산업진흥원 선임
관심분야: 인간-로봇 상호작용, 공장 자동화, 로봇 표준화

2002 울산대학교 전기전자및자동화공학부(학사)
2006 울산대학교 전기전자정보시스템공학과(석사)
2020 울산대학교 전기전자컴퓨터공학과(박사 수료)
2008~2015 지능형자동차부품진흥원 팀장
2015~현재 한국로봇산업진흥원 수석
관심분야: 자율주행, 지능형 로봇, 서비스 로봇, 첨단제조로봇