고출력 및 경량 협동로봇 위한 케이블-유압 구동 3자유도 매니퓰레이터 설계 및 구현

© Korea Robotics Society. All rights reserved.
Abstract
This paper presents cable-hydraulic driven 3DoF (Degree-of-Freedom) manipulator for cooperative robot with high output/low inertia and enhancing lager workspace of hydraulic manipulator. Hydraulic actuation could be solution to design more higher output manipulator than the one of electric motor actuation due to install actuation source and robot joint separated. In spite of this advantage, the conventional hydraulic driven manipulator using cylinder or vane actuator is not suitable for the candidate of cooperative robot because smaller workspace owing to small RoM (Range of Motion) hydraulic actuator. In this paper, we propose 3DoF manipulator with cable-hydraulic actuation which is more larger ratio of payload-to-weight than the one of conventional cooperative manipulator and larger workspace than the one of existing hydraulic driven manipulator. The performance of proposed manipulator was demonstrated by the experiments for confirming overall workspace task, high payload operation task under worst situation and comparing repeatability between developed manipulator and existed cooperative robots. The results of experiments showed that the appropriate performance of proposed manipulator for cooperative robot.
Keywords:
Cooperative Robot, Cable-Hydraulic Actuation, Payload, Payload-to-weight ratio, Workspace1. 서 론
최근 산업현장에서는 인간과 협업이 가능한 협동로봇이 주 목받고 있다. 이러한 로봇들은 안전펜스로 작업영역과 안전영 역을 분리하였던 기존의 산업용 로봇과는 달리 인간과 하나의 작업공간을 공유하면서 작업하는 것이 기본 요건이다.
기존의 협동로봇들[1-7]은 전기모터 구동 매니퓰레이터가 주 를 이루고 있는데, 가반하중을 높이기 위해 기어구조로 모터 와 직결하고 이를 로봇관절에 배치하는 구조를 가진다. 그러 나, 해당구조는 관절의 무게가 증가하여 액추에이터 출력의 대부분을 중력보상을 위해 사용하기 때문에, 실제 작업을 위 한 출력이 낮아지는 것을 피할 수 없다. 물론 기어비를 높여 10 kgf 이상의 가반하중을 갖는 매니퓰레이터들[2-6]이 개발되었 지만, 높은 기어비 때문에 작업 속도가 느리고, 자체중량이 높 아지며, 또한 효율 감소와 발열 등으로 제시된 출력을 가지는 데 한계가 있다. 예를 들어, Baccelliere이 작성한 논문에서[8] 제안된 전기모터 구동 매니퓰레이터는 최대 가반하중(15 kgf) 은 불과 15초~20초에서만 가능하고, 지속적인 작업이 가능한 최대 가반하중은 7 kgf에 불과하다.
또한 협동로봇은 사람과 로봇간의 거리가 가까워짐에 따라 사람-로봇간의 안전한 물리적 상호작용을 위해, 로봇 자체의 무게를 줄이는 것이 매우 중요하다[9]. 그러나 전기모터구동 방식의 매니퓰레이터는 높은 출력을 가지기 위해서는 자체 중량이 증가할 수 밖에 없다. 대표적으로 유니버셜로봇사의 UR10[2]은 10 kgf 가반하중, 자체중량 29 kg이며, 뉴로메카의 Indy12[6]는 12 kg 가반 하중, 자체중량 53 kg으로 가반하중이 커질수록 로봇의 자체중량은 더욱 커져 실제 설치 작업의 어 려움이나 로봇 자체중량과 관성에 의한 위험도도 높아지게 된 다. 또 다른 방법으로 매니퓰레이터의 가반하중 향상을 위해 기구적 메커니즘을 이용한 중력 보상을 수행하는 방법[9]도 있 으나, 이 또한 추가된 기구 메커니즘으로 인한 로봇 매니퓰레 이터 자체중량이 증가되는 것을 피할 수 없다. 이러한 이유로 많은 연구자와 회사에서 로봇의 무게를 줄이기 위한 연구가 진 행되고 있으나, 아직까지도 전기 모터 구동방식의 물리적 한계 를 극복하기가 어렵다.
반면에 유압 구동방식은 로봇 관절로부터 동력원을 분리할 수 있어 위와 같은 문제를 해결하기 위한 적합한 솔루션 중 하나 이다. 굴삭기와 같이 동력원은 몸통(베이스)에 두고, 관절에는 실린더만을 배치하여 무게를 줄일 수 있기 때문이다. 전기모터 구동방식과 비교하면 출력대비 무게는 5배, 부피는 10배가 높기 때문에[10], 동일 가반하중이면서 보다 가볍고 소형 관절을 갖는 매니퓰레이터를 만들 수 있다. 유압 구동 매니퓰레이터들 중 하 나인 Kraft Teleroboics사의 Grips[11]는 가반하중 45 kgf, 자체중 량 59 kg이며, IIT의 HyArm[12] 또한 가반하중 10 kgf, 자체중량 12.5 kg으로 전기모터 구동 매니퓰레이터 보다 높은 자체중량 대 가반하중비를 갖는다. 그러나, 이러한 유압 구동방식은 관절 의 작동각을 크게 하는데 제약조건이 많아 다양한 환경에서 여 러 작업 수행을 위해 넓은 작업범위가 요구되는 협동로봇에 적 용하기에는 한계가 있다.
본 논문에서는 높은 출력을 가지면서 넓은 동작범위를 가지는 케이블-유압 구동 액추에이터를 이용한 협동로봇을 제안하고자 한다. 에너지 밀도가 높은 유압구동방식을 사용하여 높은 출력 을 가지면서 자체중량을 줄일 수 있고, 기존 유압 매니퓰레이터 보다 넓은 작업범위를 가질 수 있음을 확인하기 위해, [Fig. 1] 과 같이 3자유도 유압매니퓰레이터를 제작하여 실험을 통해 검증하고, 향후 협동로봇을 위해 필요한 연구에 대해서 제시하고자 한다.
![[Fig. 1]](/xml/26115/JKROS-14-3-179_F1.jpg "[Fig. 1]")
The proposed 3 DoF manipulator with cable-hydraulic actuation modules for cooperative robots
본 논문은 다음과 같이 구성된다. 2장에서는 제안된 매니퓰 레이터 시스템에 대해 소개한다. 3장에서는 실험을 통해 해당 시스템의 성능검증을 수행한다. 마지막으로 4장에서는 결과 를 정리하고. 향후 연구계획을 제시한다.
2. 시스템 설계
이번 장에서는 유압 기반 협동로봇을 위한 액추에이터 모듈 및 3자유도 매니퓰레이터 시스템 설계에 대해 각각 설명한다.
2.1 액추에이터 모듈
본 논문에서는 고출력 및 넓은 작업공간을 위한 협동 로봇용 매니퓰레이터 개발을 위해, 케이블-유압 구동 액추에이터 모듈 을 사용하였다[13]. 케이블-유압 구동 액추에이터 모듈은 기존의 선형 실린더 구동 방식의 작은 작동각도와 유격의 한계를 극복 하고, 로터리형 베인 방식에서 복잡한 씰링 구조와 높은 마찰 력, 출력대비 높은 중량의 한계를 극복하기 위한 새로운 방식의 유압 구동 방식이다. 구동원리는 두개의 선형 실린더의 인장력 으로 기존의 로드 대신 케이블을 당겨 풀리를 회전시키는 것이 다. [Fig. 2]는 본 연구그룹에서 개발한 기존의 케이블 구동 유압 액추에이터를 3자유도 매니퓰레이터의 목표사양에 맞추어 제 작한 것을 나타낸다. 이때 사용된 합성섬유 케이블은 동일 직경 의 스틸 케이블 보다 약 2배 높은 파단강도를 가지고, 훨씬 작은 풀리 직경에서도 구부릴 수 있기 때문에 동일한 출력을 가지면 서 보다 소형 관절을 설계하는데 유리하다(예: 직경 3파이 기준, 파단하중 합성섬유 1150 kgf [14], 스틸 와이어 588 kgf [15]).
![[Fig. 2]](/xml/26115/JKROS-14-3-179_F2.jpg "[Fig. 2]")
The cable-hydraulic driven 1 DoF actuation modules: (a) 3D CAD image, (b) Prototype
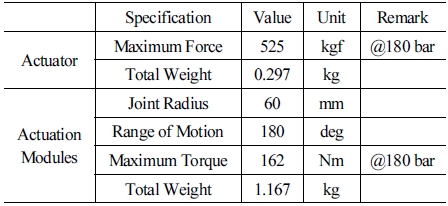
관절모듈 사양은 매니퓰레이터의 최대 도달거리(1.06 m)에 서 10 kgf 이상의 가반하중을 만족하도록 [Table 1]과 같이 선정 하였다. 작동압력 180 bar에서 162 Nm의 토크를 가지면서 180 도의 작동 각도를 가질 수 있도록 실린더와 풀리를 설계하고 케 이블을 선정하였다. 이때, 출력토크 선정을 위해 매니퓰레이터 의 무게와 작업물 무게를 함께 고려하였다. 또한, 응답성을 저해 할 수 있는 유압호스 설 치길이를 최소화하기 위해 유압 회로 부 분인 서보밸브 마운트와 매니폴드를 일체형으로 설계하였다.

The design specification of cable-hydraulic driven 1DoF actuation modules
기존의 케이블 구동 로봇관절에서는 케이블의 한쪽이 느슨 해지는 탈조(slack)현상을 피하기 위해, 적절한 장력이 유지되 도록 별도의 메커니즘[7] 또는 제어입력[16]을 통해 예비장력 (Pretension)을 미리 설정하게 된다. 제안된 구동 시스템의 경 우, 유압 시스템의 특성으로 별도의 메커니즘 또는 제어가 없 어도 예비장력이 설정이 가능하다[13]. 해당 시스템은 최소 예 비장력이 14.6 kgf(예비압력 5 bar, 탱크 압력 기준)으로 전체 구동 장력 중 2.78%에 해당한다.
2.2 3자유도 매니퓰레이터
다음으로는 케이블-유압 구동 모듈을 이용한 어깨-팔꿈치 관절로 구성된 3자유도 매니퓰레이터의 설계 방법 및 사양에 대해 설명한다. 본 연구에서는 이전 장에서 제시된 매니퓰레 이터의 성능을 기준으로 설계된 1자유도 케이블-유압 구동 모 듈을 이용하여, [Fig. 3]과 같이 어깨-팔꿈치 관절로 구성되는 3자유도 매니퓰레이터를 설계하였다. 1번째 관절(Yaw)은 케 이블-유압 구동 모듈이 모바일 베이스와 같이 결합이 되고, 2 번째(Pitch), 3번째 관절(Pitch)은 소형화, 경량화와 함께 배관 이 간결하도록 하나의 링크로 구성하였다.
![[Fig. 3]](/xml/26115/JKROS-14-3-179_F3.jpg "[Fig. 3]")
The 3D CAD image of cable-hydraulic driven 3DoF manipulator with joint configuration
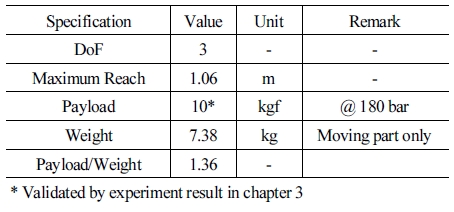
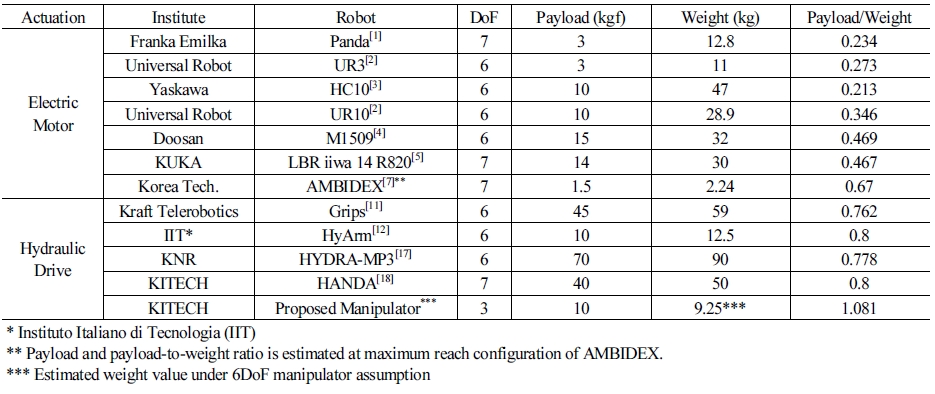
해당 매니퓰레이터의 주요 설계사양은 [Table 2]에서 제시 하였다. 여기서, 기존 매니퓰레이터들과 비교하여 개발된 매 니퓰레이터의 우수성을 평가하기 위해, 다음과 같은 성능 지 표를 사용하였다: 1) 가반하중/자체중량 비율, 2) 작업영역 첫번째로 가반하중/자체중량 비는 동일한 가반하중을 가질 때 얼마나 매니퓰레이터를 가볍게 만들 수 있는지에 대한 정 량적인 지표다. [Fig. 4], [Table 3]에서 제시된 기존 전기모터 구동 협동로봇[1-5][7]과 유압매니퓰레이터[11,12][17,18]들의 가반하 중, 자체중량 그리고 이것의 비율을 나타내고 있다. 가반하중/ 자체중량 비를 살펴보면, 기존 전기모터 구동 협동로봇[1-5]은 0.2~0.467이며, 기존 유압 매니퓰레이터[11,12][17,18]는 0.7628~ 0.8이다. 이러한 이유로 전기구동 방식으로 비율을 높이기 위 한 노력으로 KOREATECH에서는 모터-케이블 구동 방식으 로 AMBIDEX[7]를 개발하여 약 1.34의 비율을 가지는 것을 볼 수 있다. 그러나, 제시된 사양은 매니퓰레이터의 최대 도달 거 리를 고려하지 않고 이에 약 절반에 해당하는 거리에서 가반 하중 성능을 보임을 해당문헌과 동영상[7]에서 확인할 수 있다. 이를 고려하여 다시 계산하게 되면, 최대 도달 거리를 고려한 가반하중/자체중량 비는 약 0.67로 볼 수 있다.
The design specification of cable-hydraulic driven 3 DoF manipulator
The comparison of payload and payload/weight ratio between existing and proposed manipulators
![[Fig. 4]](/xml/26115/JKROS-14-3-179_F4.jpg "[Fig. 4]")
The comparison of payload/weight ratio between existing and proposed manipulators: (a) Panda[1], (b) UR3[2], (c) AMBIDEX[7], (d) HC10[3], (e) UR10[2], (f) M1509[4], (g) LBR iiwa 14 R820[5], (h) Grips[11], (i) HANDA[18], (j) HyArm[12], (k) Proposed manipulator (weight estimated by addition to estimated wrist weight)
개발된 매니퓰레이터는 3자유도로서, 6자유도 이상의 기존 매니퓰레이터들과 비교하기 위해서는 손목관절 무게를 포함 하여 자체중량을 고려해야 한다. 이를 위해, 본 연구팀에서 개 발한 7자유도 유압 매니퓰레이터인 HANDA (Hydraulic Arm and mobile platform for Disaster Appl-ication)[18]의 손목관절 무게(12.7 kg) 대비 전체 무게(50 kg)를 계산하고, 이를 이용해 현재 제안된 매니퓰레이터의 6자유도 구성 시 예측되는 손목 3자유도 무게를 추정하였다. 그 결과, 6자유도로 추정된 무게 는 기존 무게에서 1.87 kg 더해진 9.25 kg이다. 이를 이용하여 계산한 가반하중/자체중량 비는 1.081로서, 기존 유압 매니퓰 레이터와 비교하여서도 경량 설계가 가능함을 보여준다.
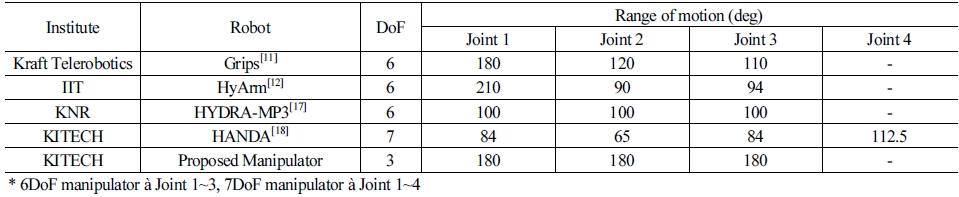
두번째로 작업영역은 실제 매니퓰레이터가 3차원 공간 내 에서 작업 가능한 지점을 표현하는 지표이다. 기존의 유압 매 니퓰레이터는 링크구조로 구성된 관절을 사용하 여 링크길이 에 비하여 작업 영역이 매우 작다. HANDA의경우도 팔길이 1.8m에서 작업영역은 약 0.6m로 1/3수준에 지나지 않는다. [Table 4]에서는 기존 유압 매니퓰레이터들과 제안된 매니퓰 레이터들의 위치를 결정하는 관절(1~3번 또는 1~4번)들의 동 작범위를 비교하였다. 또한 해당 관절 동작범위를 기초로 매 니퓰레이터의 도달 가능한 작업영역(Reachable Workspace)을 계산하였다. 비교를 위해 1~3번 관절구조가 롤(Roll)-피치 (Pitch)-피치(Pitch)로 동일한 Grips[11]을 제안된 매니퓰레이터 와 같은 링크길이로 변경하여 계산하였다. [Fig. 5]는 주어진 동작범위로 계산된 작업영역 내 매니퓰레이터 끝단의 위치를 나타낸다. 두 매니퓰레이터의 작업영역을 정량적으로 비교하기 위해, 매니퓰레이터의 끝단 위치를 토대로 Matlab에서 제공하는 convexhull 함수를 이용하여 작업영역의 부피를 계산하였다. 계산 결과, Grips와 제안 매니퓰레이터의 작업영역 부피는 각 각 2.28 m3, 3.68 m3이다. 이를 통해, 제안된 매니퓰레이터는 기 존 유압 구동 방식의 매니퓰레이터인 Grips보다 작업영역이 1.61배 더 넓다는 것을 알 수 있다.
The comparison of range of motion for each joints* between existing and proposed hydraulic manipulator
![[Fig. 5]](/xml/26115/JKROS-14-3-179_F5.jpg "[Fig. 5]")
The comparison of visualized reachable work-space between existing and proposed hydraulic manipulators: (a) Grips[11], (b) Proposed manipulator
3. 실 험
이번 장에서는 2장에서 제안된 3자유도 매니퓰레이터의 사 양 및 성능을 검증하고자 한다. 3.1절에서는 실험환경에 대해 설명하고, 3.2절에서는 어깨-팔꿈치 관절로 구성된 3자유도 케이블-유압 구동 매니퓰레이터의 사양 검증을 위한 작업영 역, 가반하중 실험과 기존 협동로봇과의 성능 비교를 위한 위 치 반복 정밀도 실험을 수행하고 실험결과에 대해 논의한다.
3.1 실험장치 구성
제작된 3자유도 매니퓰레이터를 구동하기 위해 다음과 같이 시스템을 구성하였다. 이때 사용된 유량 서보밸브인 200 series (Star Hydraulics, UK)와 자체 개발한 제어 앰프를 사용하였 으며, 각도 측정을 위한 센서로는 비접촉식 포텐셔미터 NRH 300 (Penny & Giles, UK)를 장착하였다. 실험을 위한 제어기는 UEISIM300 (United Electronic Industries, USA)로, 입/출력은 16 비트의 아날로그-디지털 변환기, 디지털-아날로그 변환기, 시리 얼 통신이 가능한 상용 제어기이며, 2msec의 제어주기를 가진다. 각 관절에 장착되어 있는 포텐셔미터는 아날로그 입력과 연결되 고, 서보밸브 제어앰프는 아날로그 출력과 연결된다. 해당 시스 템에 대한 보다 자세한 사양은 참고문헌[19]에서 확인할 수 있다.
3.2 성능검증 실험 및 고찰
3자유도 케이블-유압 구동 매니퓰레이터의 설계사양 및 제 어성능을 검증하기 위해 1) 가반하중 확인 실험, 2) 전체 작업 영역 확인 실험, 3) 반복 정밀도 실험을 진행하였다.
첫번째로 매니퓰레이터의 가반하중 실험을 위해 5 kgf의 바 벨 2개를 매니퓰레이터 끝 부분에 장착하여 전 작업영역에서 걸쳐 여러 목표위치를 추종하도록 하였다. 해당 실험 과정은 [Fig. 6]에서 스냅샷 및 영상으로 확인할 수 있으며, 실험결과 전 작업영역에서 10 kgf 이상 가반하중을 가지는 것을 알 수 있다.
![[Fig. 6]](/xml/26115/JKROS-14-3-179_F6.jpg "[Fig. 6]")
The experiment for verifying payload of proposed manipulator (https://www.youtube.com/watch?v=3MR_O3xDAVU)
두번째로 작업영역 확인을 위해 매니퓰레이터가 결합되어 있는 4족 보행 플랫폼[20,21]과 충돌하지 않는 작업영역을 먼저 선정하고, 이를 만족할 수 있도록 관절 각도를 정해 주기적으 로 목표값을 추종할 수 있도록 입력을 인가하였다. 이때 세 관 절 모두 기구부 간의 충돌없이 180도를 도달하기 위해, 관절 각도 제한 기구부는 분리하여 실험을 수행하였다. 해당 실험 결과는 [Fig. 7]에서 확인할 수 있으며, 실험결과 세 관절 모두 180도의 작동각도를 가지는 것을 알 수 있다.
![[Fig. 7]](/xml/26115/JKROS-14-3-179_F7.jpg "[Fig. 7]")
The experiment result for verifying workspace of proposed manipulator
세번째로 위치 반복 정밀도를 측정하기 위해 [Fig. 8]과 같이 실 험장치를 구성하였다. 목표점에는 분해능 0.001 (mm)를 갖는 길 이 측정용 디지털 인디게이터인 ID-C125XB (Mitutoyo Co., Japan)를 설치하였다. 시작점과 목표점을 반복하여 20회 왕복하 도록 입력을 인가하고, 매니퓰레이터가 매 목표점에서 정지할 때 마다 인디게이터의 값을 기록하여 반복정밀도를 계산을 위한 데 이터로 사용하였다. 이 실험은 산업용 로봇 표준인 ISO 9283규격 [22]을 참조하여 간략화 한 것으로, 기존 협동로봇과의 제어성능을 간접적으로 비교할 수 있는 척도로 활용하기 위해 수행하였다.
![[Fig. 8]](/xml/26115/JKROS-14-3-179_F8.jpg "[Fig. 8]")
The positioning repeatability experiment
[Fig. 9]은 실험결과 데이터를 나타낸다. 반복 정밀도를 계 산하기 위해 해당 연구에서는 ISO 9283규격에 제시된 방법을 이용하였다. 계산 방법은 위 실험데이터의 오차의 평균 및 표 준편차를 통해, 위치 반복 정밀도를 나타내는 위치오차의 3- 시그마를 산출하는 것이다. 계산 결과, 오차의 평균은 0.0147 (mm), 표준편차는 0.1016 (mm), 그리고 위치 반복 정밀도는 0.3194 (mm)으로 산업용 협동 로봇인 UR10[2]의 위치 반복 정 밀도인 0.1 (mm)에 약 3배정도 뒤떨어지는 성능을 보인다. 이 는 현재 개발된 매니퓰레이터는 분해능이 낮은 아날로그 기반 포텐셔미터, 유연성(Flexibility)를 갖는 합성 섬유 와이어 등을 포함하고 있기 때문이다. 향후 이에 대한 원인 검증 및 성능 개 선을 위한 연구를 추가적으로 수행할 예정이다.
![[Fig. 9]](/xml/26115/JKROS-14-3-179_F9.jpg "[Fig. 9]")
The result of positioning repeatability experiment
또한, 본 논문에서 검증을 위한 프로토타입 매니퓰레이터에 서는 힘 센서가 포함되지 않아 협동로봇의 충돌감지, 직접교시, 외력감지에 대한 제어 및 성능 검증을 진행하지 못하였다. 향후 연구에서는 힘센서를 장착하여 사람의 안전성 확보 및 사용자 의 편의를 위한 작업기능 구현 및 평가를 진행하고자 한다.
4. 결 론
본 논문에서는 사람-로봇간 협업을 위한 고출력 경량 매니 퓰레이터를 위한 새로운 설계방법을 제안하였다. 로봇관절과 동력원 분리가 가능한 유압 구동방식을 이용하였고, 기존 유 압 액추에이터를 이용한 관절 구성방식의 한계를 극복하기 위 해, 케이블-유압 구동 메커니즘을 이용하였다. 제안된 매니퓰 레이터의 우수성을 분석하기 위해, 기존 협동로봇과의 가반하 중/자체중량 비 및 유압 매니퓰레이터들과의 동작범위에 대해 비교하였다. 실험을 통하여 10 kgf의 물체를 핸들링할 수 있음 을 확인하였으며, 기존 유압 매니퓰레이터보다 넓은 작업영역 을 가질 수 있음을 보였다. 또한 협동로봇의 성능지표인 반복 정밀도는 0.3194 (mm)로 전기구동방식의 협동로봇의 0.1 (mm) 이하에 비하여 성능이 떨어지는 것으로 나타났으며, 향 후 이에 대한 원인 분석 및 개선이 필요할 것으로 판단된다.
본 연구의 후속연구는 다음과 같다. 첫째로, 개발된 액추에 이터 모듈을 이용하여 3자유도 손목관절을 추가하여, 가반하 중 15 kgf 이상, 가반하중/자체중량 비가 1이상인 6자유도 이 상의 협동로봇을 제작을 수행할 계획이다. 두번째로, 위치 제 어 성능 개선을 위한 연구를 수행할 것이다. 마지막으로, 토크 제어 기반 직접 교시, 외력감지 및 충돌 감지와 같은 협동로봇 에 필수적인 작업기능을 구현하고자 한다.
Acknowledgments
This work was supported by UST Young Scientist Research Program through the University of Science and Technology. (No. [2018YS07R]) and the Industrial Strategic Technology Development under Grant 10047635, in part by the Development of Hydraulic Robot Control Technology based on Accurate and Fast Force Control for Complex Tasks, and in part by the Industrial Technology Innovation Program under Grant 10048358, funded by the Ministry of Trade, Industry and Energy (MI, Korea).
References
- FRANKA EMIKA, [Online], https://www.franka.de, Accessed: April 22, 2019.
- Universal Robots, [Online], http://www.universal-robots.com, Accessed: April 22, 2019.
- YASKAWA, [Online], https://smart.motoman.com/en-us, Accessed: April 22, 2019.
- Doosan Robotics, [Online], http://www.doosanrobotics.com,Accessed: April 22, 2019.
- KUKA, [Online], https://www.kuka.com, Accessed: April 22, 2019.
- Neuromeka, [Online], https://www.neuromeka.com, Accessed: April 22, 2019.
-
Y.-J. Kim, “Anthropomorphic Low-Inertia High-.jpgfness Manipulator for High-Speed Safe Interaction,” IEEE Transactions on Robotics, vol. 33, no. 6, pp. 1358-1374, Dec., 2017.
[https://doi.org/10.1109/TRO.2017.2732354]

-
L. Baccelliere, N. Kashiri, L. Muratore, A. Laurenzi, M. Kamedula, A. Margan, S. Cordasco, J. Malzahan, and N. G. Tsagarakis, “Development of a Human Size and Strength Compliant Bi-Manual Platform for Realistic Heavy Manipulation Tasks,” 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5594-5601, Vancouver, BC, Canada, 2017.
[https://doi.org/10.1109/IROS.2017.8206447]
-
K.-H. Ahn and J.-B. Song, “6 DOF Industrial Robot Based on Multi-DOF Counterbalance Mechanism,” Journal of Korea Robotics Society, vol. 12, no. 1, pp. 11-18, Mar., 2017.
[https://doi.org/10.7746/jkros.2017.12.1.011]
- H. E. Merritt, Hydraulic Control Systems, John Wiley & Sons, 1967.
- Kraft TeleRobotics, [Online], http:// www.krafttelerobotics.co m, Accessed: April 22, 2019.
-
B. U. Rehman, M. Focchi, J. Lee, H. Dallali, D. G. Caldwell, and C. Semini, “Towards a multi-legged mobile manipulat-or,” 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3618–3624, 2016.
[https://doi.org/10.1109/ICRA.2016.7487545]
-
J. Kim, S. Park, and J. Cho, “Design and Implementation of the Cable Rod Hydraulic Actuator for Robotic Revolute Joints,” Journal of the Korean Society for Precision Engineering, vol. 33, no. 9, pp. 723-780, Sept., 2016.
[https://doi.org/10.7736/KSPE.2016.33.9.723]
- LIROS Unlimited Rope Solutions, [Online], https://www.liros.com, Accessed: April 22, 2019.
- Steel Wire Rope, [Online], http://www.steelwirerope.com, Accessed: April 22, 2019.
-
K. Kong, J. Bae, and M. Tomizuka, “Torque Mode Control of a Cable-Driven Actuating System by Sensor Fusion,” Journal of Dynamic Systems, Measurement, and Control, vol. 135, no. 3, pp. 031003.1-7, 2013.
[https://doi.org/10.1115/1.4023064]
- KNR Systems Inc., [Online], http://rnd.knrsys.com, Accessed: April 22, 2019.
- J. Kim, B. Park, S. Park, J. Kim, and J. Cho, “Development of Mobile Hydraulic Manipulator for Complex Tasks,” The 33rd ICROS Annual Conference (ICROS 2018), Buan, Korea, pp. 232-233, 2018.
-
J. S. Cho, “A Study of Hydraulic Actuator Based on Electro Servo Valve for A Walking Robot,” Journal of Drive and Control, vol. 13, no. 2, pp. 26-33, 2016.
[https://doi.org/10.7839/ksfc.2016.13.2.026]
- J. Seo, S. Park, B. Park, and J. Kim, “Implementation of Hydraulic Quadruped Robot Platform with SLIP Based Leg,” KSPE 2016 Spring Conference, pp. 199-200, Jeju, Korea, 2016.
- J. Kim, B. Park, J. Kim, S. Park, J. Kim, and J. Cho, “Development of Integrated Platform of Quadruped Robot and Manipulator for Traveling and Manipulation on Rugged Terrain,” The 14th Korea Robotics Society Annual Confere-nce (KRoC 2019), Pyeongchang, Korea, 2019.
- ISO 9283:1998 Manipulating industrial robots – Performan-ce criteria and related test methods, [Online], Available: https://www.iso.org/standard/22244.html, Accessed: April 22, 2019.

2012 건국대학교 기계공학과(공학사)
2016 과학기술연합대학원대학교 로보틱스 및 가상공학과(공학석사)
2016~현재 과학기술연합대학원대학교 로봇공학과 박사과정
관심분야: 유압 매니퓰레이터, 케이블 구동 메커니즘

2008 한남대학교 기계공학과(공학사)
2011 한양대학교 기계공학과(공학석사)
2011~현재 한국생산기술연구원 연구원
관심분야: 유압 로봇 제어, 원격 조작, 유압 제어

2009 금오공과대학교 전자공학과(공학사)
2011 금오공과대학교 전자공학과(공학석사)
2011~현재 한국생산기술연구원 연구원
관심분야: 전자 시스템, 유압 로봇, 웨어러블 로봇

2010 충북대학교 기계공학과(공학사)
2012 성균관대학교 기계공학과(공학석사)
2019 성균관대학교 기계공학과(공학박사)
2019~현재 한국생산기술연구원 박사 후 과정
관심분야: 로봇 SI, 유압 시스템, 매니퓰레이터 제어

2012~현재 한국생산기술연구원 연구조원
2019~현재 한양대학교 융합공학과 학사과정
관심분야: 로봇 설계, 유압 시스템 설계, 소프트 로봇
2002 금오공과대학교 전자공학과(공학사)
2004 금오공과대학교 전자공학과(공학석사)
2015 명지대학교 전자공학과(공학박사)
2011~현재 한국생산기술연구원 선임연구원
관심분야: 유압 로봇, 4족 보행 로봇, 유압 제어